

2.2. Типовых звенья и их передаточные функции
Разбиение систем регулирования на звенья существенно упрощает их исследование, расчет и конструирование. Звенья – это элементарные ячейки, из которых строится система, и динамические свойства которых определяют поведение системы в целом.
Общим свойством всех звеньев систем регулирования является однонаправленность их действия, т.е. сигнал в любом звене проходит только от входа к выходу и, следовательно, выход звена не оказывает никакого воздействия на его вход. Вход каждого последующего звена является выходом предыдущего.
Звенья систем регулирования могут иметь самую разнообразную физическую основу (электрическую, механическую, гидравлическую и т.д.) и конструктивное исполнение, но при этом относится к одной функциональной группе. Соотношение входного и выходного сигналов в звеньях одной и той же функциональной группы описываются одинаковыми дифференциальными уравнениями. Это свидетельствует о том, что такие звенья имеют одинаковые динамические свойства.
Так как процесс автоматического регулирования определяется только динамическими свойствами системы а, следовательно, и ее звеньев, то в основу классификации звеньев положены их динамические свойства. Такая классификация звеньев по виду описывающих эти звенья дифференциальных уравнений дает возможность разработать стройную теорию систем автоматического регулирования и единые методы их исследования и расчета, не зависящие от различий в физических процессах и конструктивных решениях, принятых за основу при проектировании САР и ее элементов.
Простейшими типовыми звеньями систем автоматического регулирования являются: усилительное, интегрирующее, дифференцирующее, инерционное звено первого порядка, инерционное звено второго порядка, интегро-дифференцирующее и запаздывающее звенья.
2.2.1. Усилительное (безынерционное) звено
Это звено не только в статике, но и в динамике описывается алгебраическим уравнением
![]() (2.8)
(2.8)
Коэффициент
пропорциональности
![]() называется коэффициентом усиления или
коэффициентом передачи звена. Уравнение
усилительного звена (2.8) алгебраическое,
это свидетельствует о том, усилительное
звено передает сигнал мгновенно без
динамических переходных процессов и
искажений.
называется коэффициентом усиления или
коэффициентом передачи звена. Уравнение
усилительного звена (2.8) алгебраическое,
это свидетельствует о том, усилительное
звено передает сигнал мгновенно без
динамических переходных процессов и
искажений.
Характер изменения
во времени выходной величины усилительного
звена при подаче на его вход постоянной
входной величины
![]() представлен на рис. 2.3.
представлен на рис. 2.3.
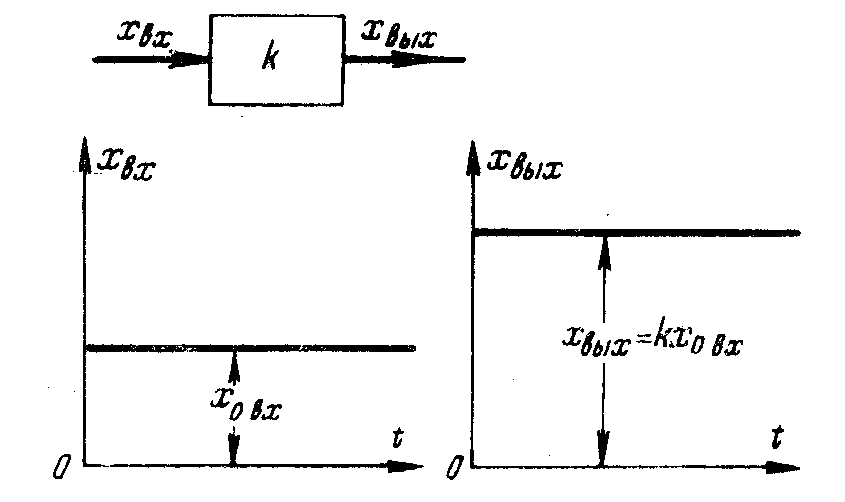
Рис. 2.3 Передаточная функция и переходный процесс усилительного звена
Передаточная функция звена с учетом выражения (2.3) имеет вид:
![]() (2.9)
(2.9)
Примером такого звена являются механический редуктор (без учета явления скручивания и люфта), безынерционный (широкополосный) усилитель, делитель напряжения и т.п. Многие датчики сигналов, как, например, потенциометрические датчики, индукционные датчики, вращающиеся трансформаторы и т.п., также могут рассматриваться как безынерционные звенья.
Переходная функция
такого звена представляет собой
ступенчатую функцию, т.е. при
![]() .
Функция веса представляет собой
импульсную функцию, площадь которой
равна
.
Функция веса представляет собой
импульсную функцию, площадь которой
равна
![]() ,
т.е. при
,
т.е. при
![]() .
.
АФХ вырождается
в точку, расположенную на вещественной
оси на расстоянии
![]() от
начало координат. Модуль частотной
передаточной функции
от
начало координат. Модуль частотной
передаточной функции
![]() постоянен на всех частотах, а фазовые
сдвиги равны нулю (
постоянен на всех частотах, а фазовые
сдвиги равны нулю (![]() ).
).
Безынерционное
звено является идеализацией реальных
звеньев. В действительности ни одно
звено не в состоянии равномерно
пропускать все частоты от
![]() до
до
![]() .
Обычно к такому виду звена сводится
одно из реальных звеньев, рассматриваемых
ниже, например апериодическое или
колебательное, если можно пренебречь
влиянием динамических (переходных)
процессов в этом звене.
.
Обычно к такому виду звена сводится
одно из реальных звеньев, рассматриваемых
ниже, например апериодическое или
колебательное, если можно пренебречь
влиянием динамических (переходных)
процессов в этом звене.