

2.1.1. Порядок выполнения работы.
-
Вычерчивают структурную схему исследуемой кинематической цепи. Звенья обозначают цифрами, а кинематические пары – латинскими буквами.
-
Составляют таблицу кинематических пар, определяя какие звенья, образуют кинематические пары. Например: A (0 – 1), B (2 – 5) и т.д.
-
определяют степень подвижности кинематической цепи и сравнивают её значение с числом входных звеньев, делая вывод – является ли кинематическая цепь механизмом.
-
При необходимости выполняют замену высших кинематических пар, условно удаляя звенья, создающие пассивные связи, не влияющие на подвижность кинематической цепи. После этого определяют степень подвижности заменяющей кинематической цепи и сравнивают её значение с числом входных звеньев, делая вывод – является ли кинематическая цепь механизмом.
-
Вычерчивают структурную схему кинематической цепи заменяющего механизма. Из кинематической цепи механизма – руководствуясь признаком структурной группы
 ,
выделяют кинематические цепи составляющих
её структурных групп, вычерчивая их
схемы.
,
выделяют кинематические цепи составляющих
её структурных групп, вычерчивая их
схемы. -
Для каждой структурной группы определяют её класс и порядок, и – при необходимости – вид.
-
Определяют класс механизма.
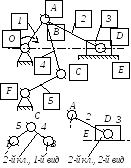
Пример. Для заданной схемы плоской кинематической цепи определить величину степени подвижности и сделать вывод – является ли кинематическая цепь механизмом. Если кинематическая цепь является механизмом, определить его класс.
 Последовательность
решения задачи.
Последовательность
решения задачи.
Обозначим звенья кинематической цепи цифрами, а кинематические пары – латинскими буквами.
Таблицу кинематических пар заполняют, определяя какие звенья их составляют, и их класс: O(0–1) кл. 5, A(1–2) кл. 5, B(2–4 кл. 5) и т.п. Обозначения звеньев и кинематических пар наносят на схему. В примере номера звеньев и обозначения кинематических пар на схеме заключены в рамки, чтобы обратить внимание на то, что их помещают на схему при решении. При выполнении заданий рамки не проставляют.
Так
как кинематическая цепь – плоская, то
её степень подвижности определим по
формуле Чебышева:
![]() .
Для заданной цепи
.
Для заданной цепи
![]() .
Следовательно,
.
Следовательно,
![]() .
Так как величина W
совпадает с заданным числом входных
звеньев (они обозначены на схемах
стрелками), то заданная кинематическая
цепь является механизмом.
.
Так как величина W
совпадает с заданным числом входных
звеньев (они обозначены на схемах
стрелками), то заданная кинематическая
цепь является механизмом.
По правилам структурного анализа выделим структурные группы из кинематической цепи механизма. Их схемы с обозначенными звеньями и кинематическими парами вычерчивают без соблюдения масштаба, определяют их класс и вид. Класс механизма определяют по наивысшему классу структурной группы. Данный механизм – второго класса.
2.2. Кинематика зубчатых механизмов.
При кинематических расчётах зубчатого механизма определяют либо угловые скорости звеньев механизма, на которых установлены зубчатые колёса, либо передаточные отношения между входным звеном и промежуточными или выходными звеньями механизма. кинематический расчёт зубчатого механизма начинают с анализа его работы, определения характера движения его звеньев, определения к каким звеньям относятся зубчатые колёса механизма.
При этом следует помнить, что: кинематический расчёт зубчатого механизма с неподвижными осями зубчатых колёс (рядового механизма) можно выполнить по соотношениям чисел зубьев пар зацепляющихся колёс; кинематический расчёт зубчатого механизма с подвижными осями зубчатых колёс можно выполнить только с использованием формулы Виллиса.
Изучив работу механизма, необходимо нарисовать его кинематическую схему, используя стандартные символы для обозначения зубчатых колёс, способа их соединения с валами и осями механизма. Следует помнить, что конструктивная и кинематическая схемы механизма – это не одно и то же, что зубчатые колёса, как правило, не являются звеньями механизма, а звенья представляют совокупность валов и жёстко соединённых с ними зубчатых колёс.
2.2.1. Порядок выполнения работы. После анализа кинематической схемы механизма необходимо определить:
-
числа зубьев зубчатых колёс механизма (в большинстве моделей они написаны на торцевых плоскостях зубчатых колёс);
-
степень подвижности механизма по его кинематической схеме – если её величина совпадает с числом входных звеньев, то схема соответствует модели механизма;
-
передаточное отношение зубчатого механизма либо угловые скорости звеньев –в зависимости от типа механизма.
П ример.
Выполнить кинематический расчёт
приведеного
на схеме
многозвенного сателлитного дифференциального
механизма с двумя входными звеньями 1
и 3.
ример.
Выполнить кинематический расчёт
приведеного
на схеме
многозвенного сателлитного дифференциального
механизма с двумя входными звеньями 1
и 3.
Действуя в указанной выше последовательности, запишем формулу Виллиса для колес 1 и 3, угловые скорости которых заданы:
![]() .
( 2.1.)
.
( 2.1.)
Передаточное отношение обращенного механизма получим через числа зубьев зубчатых колес:
 .
.
Решая уравнение (2. 1.) относительно ωh, получим величину угловой скорости водила.
Если затормозить колесо 3, – то есть ω3 = 0, то механизм перестает быть дифференциальным. Тогда выражение (2. 1.) примет вид
 .
(2. 2.)
.
(2. 2.)
Такие сателлитные механизмы теоретически позволяют реализовать любое передаточное отношение путем подбора зубьев. Например, задаваясь числами зубьев зубчатых колес z1 = 100,
z2 = 101, z2' =100, z3 = 99, получим
 .
.
поделив числитель на знаменатель в выражении (2. 2), получим
![]() .
.
Следовательно, колесо 1 будет вращаться в 10000 раз медленнее водила h. Для получения такого передаточного отношения в рядовом зубчатом механизме потребуется несколько пар зубчатых колес, и он будет иметь большие габаритные размеры.
Из формулы (2.2.) следует, что в сателлитных механизмах с одним входным звеном из формулы Виллиса можно получить зависимость для определения передаточного отношения между любым колесом и водилом. Для определения передаточного отношения между зацепляющимися колесами механизма нельзя воспользоваться просто отношением их чисел зубьев, так как оси колес подвижны. В этом случае необходимо предварительно определить передаточное отношение между каждым колесом и водилом, а затем – передаточное отношение между колесами.
Например, если требуется определить передаточное отношение i12, то следует выполнить следующие преобразования:


Тогда
![]() ,
то есть в
сателлитном
механизме
передаточное
отношение
между
различными
колесами
равно
отношению
передаточных
отношений
между
этими
колесами
и
водилом.
,
то есть в
сателлитном
механизме
передаточное
отношение
между
различными
колесами
равно
отношению
передаточных
отношений
между
этими
колесами
и
водилом.
Если зубчатый механизм включает сателлитную и рядовую ступени, то его передаточное отношение равно произведению передаточных отношений ступеней. Для сателлитной ступени передаточное отношение определяется из формулы Виллиса, а для рядовой – через отношение чисел зубьев. Например, для приведенной схемы такого механизма получим:
