

-
Динамика машинного агрегата
Задачами динамики агрегата являются:
1) динамический синтез машинного агрегата с рычажным механизмом при установившемся движении.
По заданному коэффициенту неравномерности δ определяем постоянную часть приведённого момента инерции I’П и момент инерции маховика IM.
2) динамический анализ движения звена приведения с определением действительной угловой скорости ω1 и угловым ускорением ε1.
Основным, наиболее энергоёмким является рычажный механизм, с которого начинаем расчёт.
-
Структурный анализ рычажного механизма
О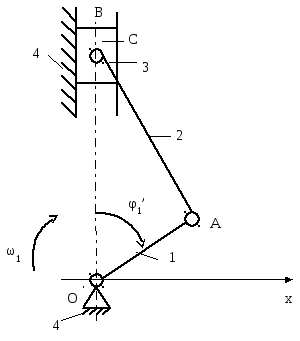 сновной
кривошипно-шатунный механизм двигателя
внутреннего сгорания самоходного шасси
предназначен для преобразования
вращательного движения кривошипа 1 в
возвратно поступательное движение
поршня 3 при холостом ходе сжатия (рис
3.1).
сновной
кривошипно-шатунный механизм двигателя
внутреннего сгорания самоходного шасси
предназначен для преобразования
вращательного движения кривошипа 1 в
возвратно поступательное движение
поршня 3 при холостом ходе сжатия (рис
3.1).
Рис 3
Кинематический анализ:
Звенья:
1-кривошип;
2-шатун;
3-ползун;
4-стойка.
Число подвижных звеньев n=3.
Кинематические пары:
О(4,1)-вращательное 5 класса;
А(1,2)-вращательное 5 класса;
В(2,3)-вращательное 5 класса;
С(3,4)-поступательное 5 класса;
Число кинематических пар 5 класса P5=4, число высших пар 4 класса P4=0.
Так как механизм плоский, то определяем степень подвижности W по формуле Чебышева:
W=3n-2P5-P4=9-8-0=1
Так как W=b, то механизм определённого движения, достаточно одной обобщённой координаты в виде угла поворота кривошипа.
Разложение механизма на структурные группы показано на рис 3.2.
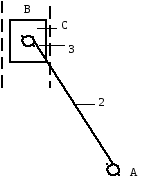
Группа 2-ого класса механизм 1-го класса
2-ой порядок
2-ой вид
Рис 3.2
-
Определение размеров и параметров рычажного механизма
Входные параметры синтеза:
- ход поршня H=0,12 м;
- частота вращения кривошипа n1=250 об/мин;
- максимальный угол давления υmax=130.
Выходные параметры синтеза:
- размеры l1=lОА, l2=lАВ, смещение оси ползуна е;
- средняя угловая скорость ω1СР кривошипа.
Основным условием синтеза является обеспечение заданного хода H. Так как ход H это расстояние между крайними положениями механизма ОА1В1 и ОА2В2, когда кривошип ОА и шатун АВ располагаются по одной прямой (рис 3.3).
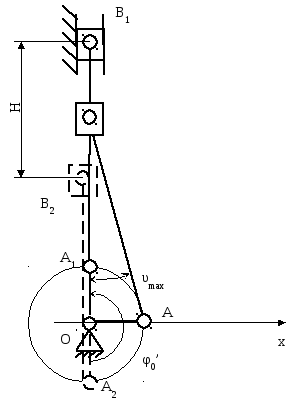
Из рис 3.3 H=lB1B2=OB1-OB2=(lOB-lOA)-(lAB-lOA)=2lOA
Отсюда l1=lOA=H/2=0,06 м
Максимальный угол давления υmax будет в положении при ОА перпендикулярно ОВ.
Из
прямоугольного треугольника
![]() .
Отсюда длина шатуна
.
Отсюда длина шатуна
![]()
Так как механизм центральный, то смещения e=0.
Средняя
скорость поршня
![]()
Средняя угловая
скорость кривошипа w1ср=![]() .
.
Начальная угловая
координата дальнего крайнего положения
![]() из рис.3.3
из рис.3.3
![]() =900.
=900.
Массы звеньев:
-шатуна m2=qlAB=
![]() кг;
кг;
-кривошипа
m1=4m2=![]() кг;
кг;
-поршня m3=0,3m2=![]() кг;
кг;
Положения центров масс звеньев ls:
-шатуна
![]() м;
м;
-кривошипа
![]() ;
;
-поршня
![]() ;
;
Осевые моменты инерции звеньев:
-шатуна
![]() кгм2;
кгм2;
-кривошипа
![]() кгм2;
кгм2;
|
Название и обозначение параметра |
Размеры l,м |
w1ср, 1/c |
|
Массы,кг |
Осевые моменты инерции Is, кгм2 |
|||||
|
l1 |
l2 |
lAS2 |
m1
|
m2 |
m3 |
|
|
|||
|
Численное значение |
0,06 |
0,267 |
0,0935 |
327.1 |
90 |
2,22 |
8,88 |
0,666 |
0,02849 |
0,01439
|
Результаты синтеза сводим в табл.4
Таблица.4