

20. Основные методы поиска отказов. Алгоритм последовательного поиска по жесткой программе.
Оптимальный метод учитывает индивидуальные характеристики элементов объекта контроля. Наиболее используемые методы: последовательный по жесткой программе и комбинированный по гибкой программе. Последовательный метод поиска состоит в последовательной оценке состояния отдельных элементов системы. В комбинированном методе обследуются две группы элементов, и заключение об отказе отдельных элементов принимают на основе результатов анализа комбинации измеренных признаков. Если последовательность проверок в программе поиска не зависит от результатов предыдущих измерений, то такая программа называется жесткой. Если очередная проверка выбирается в соответствии с результатами ранее проведенной проверки, то такая программа поиска называется гибкой.
Последовательный по жесткой программе.
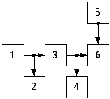
Пример: РЭС состоит из 6 блоков, с вероятностями отказов у и средними временами проверки t, указанными в таблице. Построить последовательный алгоритм поиска неисправностей.
|
|
1 |
2 |
3 |
4 |
5 |
6 |
|
q |
0,05 |
0,10 |
0,15 |
0,25 |
0,25 |
0,20 |
|
t |
2,00 |
2,50 |
2,50 |
1,50 |
1,00 |
2,00 |
|
q/t |
0,025 |
0,040 |
0,060 |
0,167 |
0,250 |
0,100 |
Последовательность проверки будет: 5 – 4 – 6 – 3 – 2 – 1
21. Комбинированный метод поиска отказов рэс.
В основе метода лежит выбор проверяемых
элементов схемы с учетом вероятностей
их отказов и наибольшей информативности
шагов проверки. Метод реализуется с
помощью таблицы признаков и состояний,
дополненной строкой вероятностей
отказов элементов (qj)
и столбцом значений функции предпочтения
(Wi).
При этом расчет значенийWiосуществляется по формуле .
Здесь суммируютсяqjвi-той строке отдельно
для всех значенийi-го
признака равных «1» и отдельно для всех
значений этого признака равных «0».
Полученные суммы вычитаются. Предпочтение
отдается проверке признака, расположенного
в той строке таблицы, гдеWiимеетнаименьшее значение. По
результатам проверки признака все
элементы можно разделить на две группы,
и для каждой группы из исходной таблицы
образовать две новые. Все действия
повторяются до тех пор, пока не произойдет
разделение таблиц на отдельные элементы
схемы. Поясним метод примером.
.
Здесь суммируютсяqjвi-той строке отдельно
для всех значенийi-го
признака равных «1» и отдельно для всех
значений этого признака равных «0».
Полученные суммы вычитаются. Предпочтение
отдается проверке признака, расположенного
в той строке таблицы, гдеWiимеетнаименьшее значение. По
результатам проверки признака все
элементы можно разделить на две группы,
и для каждой группы из исходной таблицы
образовать две новые. Все действия
повторяются до тех пор, пока не произойдет
разделение таблиц на отдельные элементы
схемы. Поясним метод примером.
Задача.Построить программу поиска неисправности для схемы с вероятностями отказов элементовq1= 0.05,q2= 0.10, q3= 0.15, q4=q5= 0.25, q6= 0.20.
Решение.Построим таблицу признаков и состояний, дополненную строкой вероятностей отказов и столбцом значений функции предпочтения. Далее произведем описанные выше разделения таблицы вплоть до отдельных элементов.
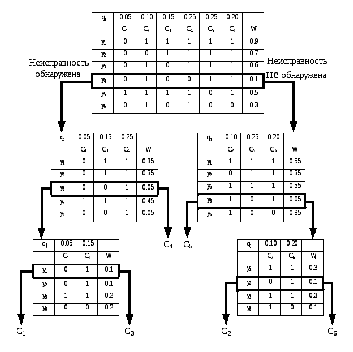
Вселевые ветви диаграммы соответствуют обнаружению неисправности, авсе правые – ее отсутствию при контроле выбранного элемента. Это общее правило построения таких диаграмм. Полученная программа, по сути, представляет собой оптимальный алгоритм поиска неисправного элемента с учетом как связей между элементами, так и индивидуальных характеристик элементов. Именно последним обстоятельством данный метод отличается от метода половинных разбиений.