

RNAV-Вовк В.И., Липин А.В., Сарайский Ю.Н
.pdf2.2.2, Оценка эксплуатантом готовности системы GPS как датчика оборудования RNAV
В связи с тем, что GPS не обладает 100% готовностью, перед выполнением по-
лета необходимо осуществить оценку эксплуатационной готовности GPS. На рис. 2.1 приводятся результаты оценки готовности применения автономного GPS-приемника
без барометрической поддержки (для усложнения задачи), выполненного на сайте ecacnav.com с использованием программы AUGUR
В начале выясняется STATUS системы GPS на заданную дату и период време-
ни, В представленном заключении задавались: дата - 15 июля 2003 года, период времени - 24 часа.
Графический вид рис. 2.1 |
показывает, |
что |
на указанный период в системе |
будут |
в работе 27 спутников (Num |
Sats), что |
для |
полетов по B-RNAV процедуру |
RAIM- |
прогноз выполнять не требуется, поскольку линия Num Sats превышает линии для
автономных GPS-приемников Un-Aided (без бароподдержки) и Baro-Aided (с баро-
поддержкой).
В |
том |
случае если |
на графике |
линия Num Sats "провалится'' ниже |
линий Un- |
||||
Aided |
или |
Baro-Aided, то |
для полета |
по |
маршруту |
необходимо |
выполнить |
процедуру |
|
RАIМ - прогнозирования. |
|
|
|
|
|
|
|
||
Для получения RAIM-прогноза |
при полете по |
конкретному |
маршруту |
необходи- |
|||||
мо задать |
дату, аэродром вылета, |
время |
вылета, |
пункты маршрута, истекшее время |
|||||
|
|
|
|
|
|
70 |
|
|
|

прохождения пунктов по маршруту, аэродром |
посадки и истекшее время посадки. |
На рис. 2.2 дано заключение RAIM-прогноза для |
маршрута Хельсинки (EFNK) - Па- |
риж (LFPG), проходящему через пункты маршрута |
CDA, BSN; вылет 15.07.03 в 09.00 |
UTC, время полета 135 мин (t пол) В заключении видно, что RAIM будет обеспечи-
ваться на всем |
протяжении |
полета, даже если вылет состоится на 15 мин (At) рань- |
ше или позже 09.00 UTC. |
Положительное заключение RAIM прогноза говорит от том, |
|
что контроль |
целостности |
будет обеспечен, следовательно, готовность системы |
также положительная. |
|
|
Рис. 2.2. Заключение RAIM-прогноза для маршрута Хельсинки - Париж
В случае, если планируется заход на посадку в режиме зональной навигации с использованием датчика GPS, то выполняется отдельный RAIM прогноз, поскольку пороги RAIM для захода на посадку значительно меньше, чем на маршруте и в ТМА
(см. табл. 2.2).
Таблица 2.2 Пороги срабатывания RAIM
Этап полета |
Значение допуска |
|
|
км |
м. мили |
По маршруту |
3.7 |
2.0 |
В районе аэродрома |
1.9 |
1.0 |
Заход на посадку |
0.6 |
0.3 |
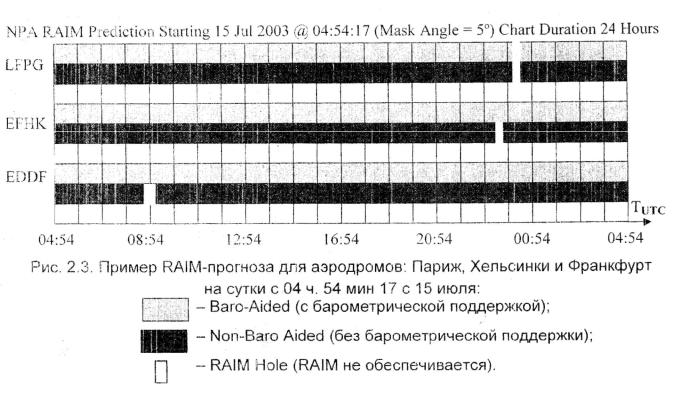
На рис. 2.3 приводится пример RAIM-прогноза для аэродромов: Париж (LFPG), Хельсинки (EI-HK) и Франкфурт (EDDF), дата/время: 15 июля 2003, 04:54 UTC на
промежуток времени +24 ч для угла маски относительно горизонта +5°.
В заключении, например, видно, что на |
указанную дату |
неточный заход на |
по- |
садку (NPA) во Франкфурте в районе 08:54, |
в Хельсинки - 22:30 с автономной GPS |
||
без бароподдержки, а в Париже - 23:15 с |
бароподдержкой |
планировать нельзя, |
т.к. |
не будет обеспечен RAIM. |
|
|
|
71
2.2.3. Наземные функциональные дополнения
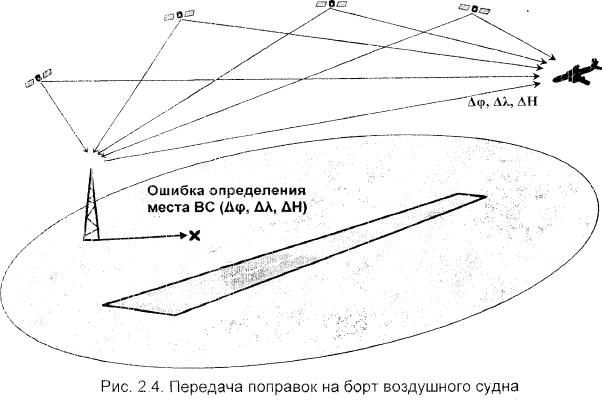
Дифференциальный метод. Суть дифференциального метода корректировки спутникового сигнала основана на относительном постоянстве значительной части погрешности СНС как во времени, так и в пространстве.
Реализация дифференциального метода возможна при наличии двух приемоиндикаторов. один из которых находится на земле, а другой - на борту ВС. Геодези-
ческие |
координаты наземного приемо-индикатора |
(именуемого контрольной |
станци- |
ей) в выбранной системе координат в WGS-84 или ПЗ-90 известны с высокой точно- |
|||
стью. |
Точность определения координат контрольной |
станции должна быть |
не ниже: |
по широте и долготе 5 см, по высоте относительно поверхности эллипсоида 0.5 м. Контрольная станция принимает сигналы спутников и определяет текущие координаты, которые в дальнейшем сравниваются с координатами привязки контрольной
станции. По результатам сравнения определяются поправки в координаты для дан-
ного района и для текущего момента времени. Полученные поправки передаются потребителям по специальной линии радиосвязи (см. рис. 2.4).
Данный метод приема сигнала относится к дифференциальному режиму ра-
боты СНС (Differential GNSS - DGNSS, Local Area Differential GNSS - LADGNSS) и
позволяет повысить не только точность определения местоположения ВС, но и целостность сигнала.
Кроме существенного улучшения точности GNSS, дифференциальный метод позволяет существенно повысить целостность навигационной информации.
Дифференциальный метод используется как в наземных, так и в спутниковых функциональных дополнениях GNSS.
Наличие наземной системы функционального дополнения (GBAS) позволяет обеспечить все виды захода на посадку, вылета и маневрирование на рабочих площадях аэродрома: ВПП, рулежные дорожки, перрон.
72
GBAS включает в себя наземные и бортовые |
подсистемы. Наземная подсис- |
тема с помощью ОВЧ-передачи цифровых данных передает в бортовую подсистему |
|
корректирующие поправки к координатам и сведения |
о целостности сигналов спут- |
ников GNSS. |
|
GBAS выполняет следующие функции:
1)обеспечение поправок к псевдодальности;
2)обеспечение данных для конечного этапа захода на посадку;
3)прогнозирование данных об эксплуатационной готовности дальномерного ис-
точника; и
4)обеспечение контроля целостности источника дальномерных измерений
GNSS.
Втом случае, когда наземная система функционального дополнения предна-
значена для обслуживания только в районе аэродрома, такая система имеет локальную зону действия и именуется «дополнительная система с локальной зоной
действия» (Local Area Augmentation System - LAAS).
Вназемных системах функционального допопнения LAAS станция слежения
размещается в аэропорту или вблизи него. Сигналы такой системы принимаются ВС
в окрестности аэропорта на расстоянии порядка 37 км. На рис. 2.5 представлена рабочая область LAAS при условии расположения передающих антенн в непосредст-
венней близости от ВПП.
2.2.4.Спутниковые системы функционального дополнения
Вспутниковых системах функционального дополнения (SBAS) представляется
информация о целостности, дополнительные сигналы дальности и дифференциаль-
ная информация, что вместе взятое обеспечивает все виды полетов, в том числе и
точные заходы на посадку AVP-I и AVP-II.
73

SBAS состоит из трех отдельных сегментов:
-наземная инфраструктура;
-спутники SBAS;
-бортовые приемники SBAS.
Наземная инфраструктура включает сеть станций слежения и обработки, которые принимают данные от геостационарных спутников, рассчитывают целостность,
поправки и дальномерную информацию, формирующие сигнал в пространстве спут-
никовых систем функционального дополнения. Спутники SBAS |
ретранслируют |
этот |
сигнал от наземной инфраструктуры на бортовые приемники |
SBAS, которые |
опре- |
деляют информацию о координатах и времени от основной |
орбитальной системы |
|
GNSS и геостационарных спутников SBAS. Бортовые приемники SBAS получают дальномерную информацию и поправки и используют эти данные для определения целостности и уточнения измеренного местоположения ВС.
Предполагается использование трех широкозонных (спутниковых) систем функ-
ционального дополнения:
-американская WAAS (Wide Area Augmentation System);
-европейская EGNOS (European Geostationary Navigation Overlay System);
-японская MSAS (Multi-Fuirictional Satellite EJased Augmentation System)
Космические сегменты SBAS включают в себя геостационарные спутники, рас-
положенные на орбитах в плоскости экватора на высоте порядка 36000 км. Наиме-
нование спутников и их размещение на орбите (по состоянию на конец 2002 г.) дано
втабл. 2.3.
Наземные сегменты спутниковых систем функционального дополнения США -
WAAS включают (по состоянию на конец 2002 г.):
- 25 широкозонных контрольных станций, предназначенных для контроля и наблюдения за состоянием навигационного поля;
74
|
- 2 широкозонные главные станции |
управления, |
предназначенные для |
обра- |
||||||||||
ботки данных мониторинга; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 6 наземных станций передачи данных космическому сегменту и распредели- |
|||||||||||||
тельную сеть информационного обмена и связи. |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.3 |
||
|
Перечень геостационарных спутников |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
Компоненты |
Спутниковые системы функционального дополнения |
|
|
||||||||||
|
|
WAAS |
|
|
EGNOS |
|
|
MSAS |
|
|
||||
|
Космический сегмент |
INMARSAT-III |
|
INMARSAT-III |
|
|
MSAT-1 |
|
|
|||||
|
|
|
|
|
|
|
ARTEMIS |
|
|
MSAT-2* |
|
|
||
|
Количество спутников |
|
2 |
|
|
|
2 + 1 |
|
|
|
2 |
|
|
|
|
Наименование спутников |
POR |
|
AOR-W |
AOR-E |
|
ARTEMIS |
IOR-E |
|
MSAT-1 |
|
|
||
|
Размещение по долготе |
178°Е |
|
54°W |
15.5°W |
|
21.4°E |
|
64.5° E |
|
140° E |
|
|
|
|
*) Информация отсутствует. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перечисленные станции объединены в единую сеть линиями передачи и |
обра- |
||||||||||||
ботки данных. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рабочая область - от Мексиканского залива до южной части Канады и Аляска с |
|||||||||||||
Алеутскими островами. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После окончания проекта по |
|
расширению WAAS |
планируется |
увеличить |
коли- |
||||||||
чество контрольных станций до 48, головных - до 6, передачи данных - до 16, а ко-
личество геостационарных спутников до 8. |
|
|
|
|
||
В качестве |
примера на |
рис. 1,20 представлена схема |
точного |
захода на посадку |
||
в аэропорту NORMAN (штат OKLAHOMA, |
USA) с использованием |
спутниковых |
сис- |
|||
тем функционального дополнения WAAS. |
|
|
|
|
||
Спутниковая |
система |
функционального дополнения |
EGNOS |
разрабатывается |
||
по инициативе |
государств |
Европейского |
сообщества. Использование EGNOS |
улуч- |
||
шит сервис космических сегментов GPS/ГЛОНАСС в Европейском воздушном пространстве. EGNOS способен передавать навигационный GPS-подобный сигнал, что эквивалентно увеличению числа спутников в созвездиях GPS/ГЛОНАСС. Кроме того, спутники EGNOS транслируют сигнал дифференциальной коррекции, а также сообщения о целостности системы, что делает возможным их использование для точного захода на посадку.
Архитектура EGNOS включает:
- космический сегмент GPS/ГЛОНАСС и три активных геостационарных спут-
ника. После запуска Европейской спутниковой системы Galileo архитектура EGNOS расширится;
-33 опорные станции, расположенные во всей зоне обслуживания;
-4 главных центра управления, расположенные в Великобритании (Шенвик), Германии (Лангене), Испании (Торриконе) и Италии (Кьямпино);
- 7 наземных навигационных станций, находящихся в Великобритании, Германии, Испании, Италии, Португалии и Франции.
Зона обслуживания - Восточная часть Атлантического океана, Европа, Среди-
земноморье, Северное море.
Планируется расширение зоны обслуживания с включением районов Африки, Среднего Востока, СНГ, Южной Америки.
Система EGNOS была испытана в конце весны 2003 г., а 06 июня 2003 г. была открыта первая станция в Лангене. Полное введение системы в эксплуатацию пла-
нируется к 01 января |
2006 г. Предполагаемая точность определения координат в |
плане 3 м, а по высоте - 5 |
м. |
75
MSAS включает:
- 4 опорные станции мониторинга, расположенные в Японии; - 2 станции мониторинга и измерения дальности, расположенные в Австралии
ина Гавайях;
-2 станции управления, расположенные в Японии;
-сетевую систему связи.
|
Рабочая область - Восточная и |
Юго-Восточная |
Азия, Западная часть Тихого |
|||||
океана, Северная часть Австралии. |
|
|
|
|
|
|||
|
С выводом на орбиту MSAT-2 рабочая область расширится. |
|
|
|||||
|
Применение GNSS совместно с функциональными дополнениями позволяет |
|||||||
выполнять операции с учетом соответствующего типа RNP, указанные в табл. 2.4. |
||||||||
|
|
|
|
|
|
|
Таблица 2.4 |
|
|
|
Функциональные дополнения GNNS и типы операций |
|
|
||||
|
|
|
|
|
|
|
||
|
Операции/этап полета |
Тип |
Общая архитектура функционального |
|||||
|
|
|
RNP |
дополнения |
|
|
|
|
|
|
|
|
Дополни- |
|
Основное |
Самодостаточ- |
|
|
|
|
|
тельное |
|
средство |
ное средство |
|
|
|
|
|
средство |
|
|
|
|
|
Полет по маршруту |
RNP 1 и |
ABAS |
|
ABAS |
ABAS или |
|
|
|
|
|
выше |
|
|
|
ABAS+SBAS |
|
|
Начальный или промежу- |
RNP 0.3 |
ABAS |
|
ABAS или |
ABAS или |
|
|
|
точный |
участок захода на |
|
|
|
ABAS+ |
ABAS+SBAS |
|
|
посадку, |
неточный заход |
|
|
|
SBAS |
|
|
|
на посадку, вылет |
|
|
|
|
|
|
|
|
Неточный заход на по- |
RNP |
ABAS |
|
ABAS или |
ABAS или |
|
|
|
садку (с наведением в |
0.3/125 |
|
|
ABAS+SBAS |
ABAS+SBAS |
|
|
|
вертикальной плоскости) |
|
|
|
|
|
|
|
|
Точный заход на |
RNP |
ABAS+SBAS |
ABAS+GBAS |
ABAS+GBAS |
|
||
|
посадку по категории I |
0.02/40 |
|
|
|
|
|
|
76
3. ОПИСАНИЕ ПРОЦЕДУР В БАЗАХ ДАННЫХ И ДОКУМЕНТАХ АЭРОНАВИГАЦИОННОЙ ИНФОРМАЦИИ
Описание процедур в базах данных и документах аэронавигационной информации существенно отличается.
Производителям баз данных требуется детальное описание и подробности всей
процедуры для того, чтобы "закодировать" (зашифровать) ее таким образом, чтобы оборудование RNAV ее "понимало", обрабатывало и выдавало необходимую ин-
формацию летному экипажу и в автопилот. В то же время, летному экипажу требует-
ся информация в виде карт (схем), содержащих только то, что необходимо для вы-
полнения полета. Карты должны быть четкими, легко читаемыми при любой освещенности кабины и, самое главное, информация на карте должна быть адекватной
информации, представляемой на дисплеях оборудования RNAV.Очень важно, чтобы
структура |
и деятельность |
коммерческих |
производителей |
аэронавигационной |
ин- |
формации |
соответствовала |
определенным |
стандартам, а |
именно EUROCAE |
ED- |
76/RTCA DO-200A. |
|
|
|
|
|
Форма представления данных должна учитывать потребности всех возможных потребителей. Например, для программистов баз данных очень важно указание ко-
ординат, указание окончания траекторий, путевых углов и расстояний с требуемой
точностью и разрешением. В то же время, для летных экипажей более важным яв-
ляется графическое представление всей процедуры в целом. |
|
|
|
|
Производитель баз данных на |
основе информации, имеющейся в |
АИПах |
госу- |
|
дарcтв - Фирма JEPPESEN, LIDO |
(отделение авиакомпании Lufthansa |
по |
поддержа- |
|
нию баз данных), ФГУП ЦАИ ГА, - создают базы данных в формате ARINC 424. Дан- |
||||
ный формат был разработан в 1973 г. американской корпорацией Aeronautical |
Radio, |
|||
Inc. На момент написания книги действовала 16-я версия данного формата. |
|
|
|
|
Для удешевления стоимости приобретения баз данных они создаются |
по |
регио- |
||
нам мира в соответствит с делением ИКАО (рис. 3.1). |
|
|
|
|
База данных включает информацию о: |
|
|
|
|
-аэропортах с длиной ВПП 2000 фт. (660 м) и более;
-маршрутах STAR;
-переходных маршрутах (TRANSITION);
-заходе на посадку;
-маршрутах SID;
-радиосредствах VOR (VOR/DME), NDB, ILS, MLS;
-точках пересечений;
-минимальных высотах полета;
-информационных сообщениях о контролируемом пространстве и частоты радиосвязи;
-зонах ограниченного использования воздушного пространства;
-оперативных пунктах маршрута;
-магнитном склонении (в диапазоне широт 70°N - 60°S).
77

При осуществлении зональной навигации с типом RNP-1:
- необходимо иметь встроенную базу данных, охватывающую район предстоящего полета с учетом возможности ухода на запасной аэродром;
-целостность базы данных должна быть гарантирована;
-летный экипаж должен иметь возможность убедиться в том, что база данных загружена правильно;
- |
летный экипаж |
должен |
получить информацию |
о сроке |
действия базы данных; |
- |
разрешение информации должно соответствовать RNP. |
|
|||
Для RNP4, 10, |
12,6 и |
20 использование базы |
данных |
не является обязатель- |
|
ным, но если она используется, к ней предъявляются требования такие же, как и при
RNP-1.
Касаясь информации, публикуемой на картах (схемах), необходимо отметить
следующее. Если публикуемая процедура |
требует |
сертификации ВС |
по |
RNP-RNAV, |
||
P-RNAV или B-RNAV, это напрямую |
указывается в ее описании. Для RNP-RNAV все- |
|||||
гда указываются численные значения |
RNP. Кроме этого, карта с зональной процеду- |
|||||
рой имеет следующую специальную "маркировку", которая означает: |
|
|
||||
- RNAV - процедура может |
выполняться |
с |
использованием |
оборудования |
||
RNAV, работающего от датчиков DME/DME, Basic GNSS или VOR/DME; |
|
|
||||
- RNAV (DME/DME or GNSS) - |
процедура может |
выполняться с |
использовани- |
|||
ем оборудования RNAV, работающего от датчиков DME/DME или GNSS; |
|
|
||||
- RNAV(DME/DME) - процедура |
может выполняться с использованием обору- |
|||||
дования RNAV, работающего только от датчиков DME/DME; |
|
|
|
|||
- RNAV(GNSS) - процедура может |
выполняться |
с использованием |
оборудова- |
|||
ния RNAV, работающего только от датчиков GNSS; |
|
|
|
|
||
- RNAV(DME/DME or GNSS except Class A) - процедура может выполняться с использованием оборудования RNAV, работающего только от датчиков DME/DME или GNSS класса В или С.
Примечание. С вводом в действие функциональных дополнений GNSS соответствующие процедуры будут иметь маркировку "ABAS" "SBAS".
Полное описание процедуры RNAV предусматривает:
-текстуальное описание:
-табличное оформление;
-графическое представление.
Карты (схемы) для летных экипажей содержат:
-расстояния между пунктами с точностью до 0,1 м. мили;
-значения радиала с точностью в 1° и удаления с точностью 0,1 м. мили до оп-
ределенных маяков VOR/DME. по |
которым, если требуется, осуществляется кон- |
троль точности работы системы RNAV; |
|
-все точки пути процедуры с их кодификаторами;
-все радиосредства с частотами и позывными, связанные с данной процеду-
рой;
-заданные высоты/зшепоны с дискретностью 100' и скорости IAS в узлах;
-путевые углы, от магнитного меридиана с точностью до 1°, а от истинного меридиана с точностью 0.1° [13].
Примечание. Общих требований в отношении |
публикации ЗПУ не установ- |
лено, однако, для участков с указателем окончания |
траекторий типа TF, CF и т.п., |
когда линия пути задана путевым углом, его значение публикуется на карте.
79