

RNAV-Вовк В.И., Липин А.В., Сарайский Ю.Н
.pdfОбеспечиваемое с помощью бортового компьютера вертикальное наведение
основывается |
на |
барометрической высоте |
и удалении |
от |
порога |
ВПП и |
||||
определяется в виде угла траектории в вертикальной плоскости - VPA |
(Vertical |
path |
||||||||
angle) |
от высоты |
точки вертикальной траектории, расположенной |
над |
рабочим |
||||||
порогом ВПП - RDH (Reference datum height). |
|
|
|
|
|
|
|
|||
При наличии отклонения от заданного угла |
снижения |
на |
конечном |
участке |
захо- |
|||||
да на |
посадку |
это |
отклонение индицируется на |
приборе |
пилота в |
виде |
планки |
глис- |
||
сады 'Like ILS’ По текущему отклонению от заданной траектории рассчитывается
управляющий сигнал по выдерживанию заданной |
вертикальной |
траектории автопи- |
||
лотом. |
|
|
|
|
Процедуры Ваrо-VNAV не входят в P-RNAV, |
поскольку |
охватывают |
только ко- |
|
нечный участок захода на посадку и уход на второй круг. |
|
|
|
|
Внедрение схемы захода на посадку методом |
Baro-VNAV |
является |
перспектив- |
|
ным по следующим причинам: |
|
|
|
|
- данный вид захода на посадку относится к точному заходу на посадку, т.к. |
||||
обеспечивается наведение по высоте (непрерывный угол |
снижения) на |
конечном |
||
участке; |
|
|
|
|
- не требуются наземные дорогостоящие средства, формирующие глиссаду;
--не требуется дорогостоящее бортовое средство, принимающее сигналы глис-
садного радиомаяка.
Для выполнения процедуры Baro-VNAV должны быть соблюдены следующие условия:
- навигационная система должна быть сертифицирована по RNP 0.3 или выше;
--барометрические датчики и вычислители профилей снижения должны быть
сертифицированы для применения при заходе на посадку;
- база данных навигационной системы должна содержать |
следующие необхо- |
||||
димые элементы: точки пути, угол |
снижения с точностью |
до 0.01° |
и заданные |
высо- |
|
ты; |
|
|
|
|
|
- летный экипаж должен пройти подготовку и иметь |
допуск |
к |
выполнению |
дан- |
|
ного вида захода на посадку. |
|
|
|
|
|
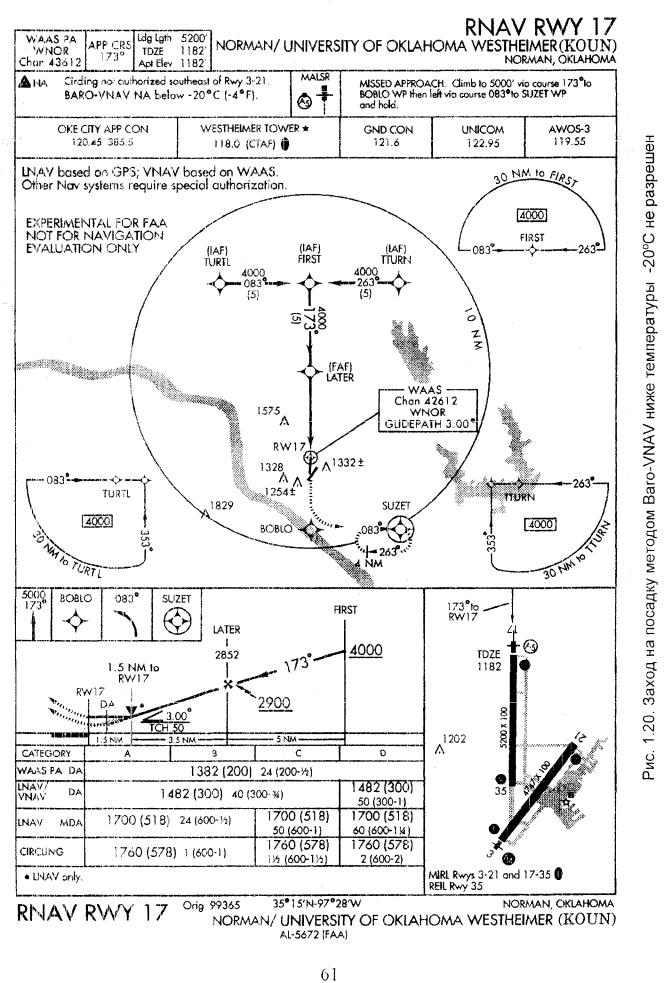
При разработке схемы захода на посадку методом Baro-VNAV, с целью учета |
|||||
температурной поправки барометрического высотомера, |
угол траектории в верти- |
||||
кальной плоскости определяется |
для минимальной температуры |
|
самого холодного |
||
месяца на аэродроме по данным за 5 лет, увеличенной в меньшую сторону с
кратностью 5°, или температуры -15°С, в зависимости от того, что меньше. Если во
время захода на посадку фактическая температура на |
аэродроме |
меньше той, |
которая использовалась при расчете схемы, то заход на |
посадку не |
разрешается |
(см. рис 1.20). |
|
|
Недостатком данного способа захода на посадку является возможная крутая траектория снижения при фактической высокой положительной температуре на аэродроме.
60

|
1.15. Критерии учета препятствий захода на посадку и вылета |
|
|
||||||||||||
|
Схемы захода на посадку с использованием |
RNAV на основе базовых приемни- |
|||||||||||||
ков -GNSS строятся на основе определенных критериев, которые не свойственны |
|||||||||||||||
традиционным схемам. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
В табл. 1.11 представлены основные |
характеристики |
|
базовых |
приемников |
||||||||||
GNSS, допуски на технику пилотирования и значение полуширины зон учета препят- |
|||||||||||||||
ствий |
( 12 W), которые используются в |
качестве критериев |
при |
построении |
схем захо- |
||||||||||
да на |
посадку и вылета для самолетов; в таблице |
1.12 - |
|
для |
схем захода |
на посадку |
|||||||||
в соответствии с RNP1 [12]. |
|
|
|
|
|
|
|
|
|
|
Таблица 1.11 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Полные допуски системы и значения полуширины зон учета препятствий |
|||||||||||||
|
|
для базовых приемников GNSS |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Параметр |
Точки пути схемы захода на посадку и вылета |
||||||||||||
|
|
|
IAWP |
|
IAWP |
|
IWP |
FAWP |
MAWP |
WP участка ухода |
|
||||
|
|
|
S> |
|
S< |
|
|
|
|
|
|
|
на второй круг |
|
|
|
|
|
55 км |
|
55 км |
|
|
|
|
|
|
|
или схемы вылета |
|
|
|
Точность навигационной сис- |
230 |
|
230 |
|
230 |
|
230 |
|
230 |
|
230 |
|
|
|
|
темы *, м |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Допуск на выдачу предупреж- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дения, связанного с RAIM *, |
3.70 |
|
1.85 |
|
1.85 |
|
0.56 |
|
0.56 |
|
1.85 |
|
|
|
|
км |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Время выдачи предупрежде- |
30 |
|
10 |
|
10 |
|
10 |
|
10 |
|
10 |
|
|
|
|
ния, с |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Допуск на технику пилотиро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вания в поперечном направ- |
3.70 |
|
0.93 |
|
0.93 |
|
0.56 |
|
0.37 |
|
0.93 |
|
|
|
|
лении - FTT (2σ). км |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Порог срабатывания сигнали- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зации контроля целостности - |
3.70 |
|
1.90 |
|
1.90 |
|
0.56 |
|
0.56 |
|
1.85 |
|
|
|
|
АТТ, км |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Продольное отклонение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отлинии пути -- ХТТ (2σ), |
7.40 |
|
2.80 |
|
2.80 |
|
1.10 |
|
0.93 |
|
2.80 |
|
|
|
|
(ХТТ = ATT + FTT), км |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Значение полуширины зоны, |
14.80 |
|
9.30 |
|
9.30 |
|
3.70 |
|
1.85 |
|
9.30 |
|
|
|
|
км |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S - радиальное расстояние от КТА.
*) Включает все допуски на. вычисления в системе RNAV:
-собственная точность космического сегмента (13 - 100 м);
-допуск, обусловленный бортовой системой приема;
-допуск, связанный с вычислениями в системе;
-точность геодезических координат точек пути.
Таблица 1.12
Значения полуширины зон учета препятствий для RNP1
Участок захода на посадку |
Полуширины зоны, км |
Начальный |
4.63 |
Промежуточный |
4.63 |
Конечный |
4.07 |
Уход на второй круг |
4.26 |
62
В схеме захода на посадку минимальный запас высоты над препятствием
(МОС) в основной зоне составляет:
-начальный участок - 300 м (1000 фут);
-промежуточный участок - 150 м (500 фут);
-конечный участок - 75 м (245 фут);
-участок ухода на второй круг: начальный - 30 м (100 фут), конечный - 50 м (165 фут),
Вдополнительных зонах значение МОС уменьшается от указанного значения до нуля.
1.16.Критерии учета препятствий при полете по маршруту
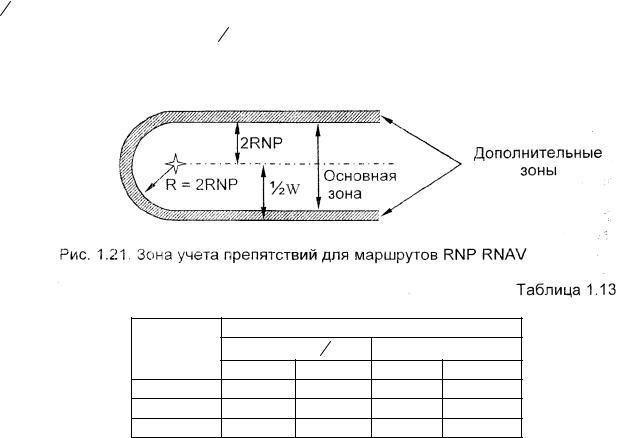
Для маршрутов RNAV, основанных на RNP участков, |
значение полуширины зо- |
ны ( 12 W) учета препятствий (рис. 1.21) определяется как: |
|
12 W – 2RNP + 2, м. миль, |
|
В табл 1.13 дано значение зоны учета препятствий |
для маршрутов с типом |
RNP4, 2 и 1. |
|
Значение |
Ширина зоны учета препятствий |
|||
RNP |
половина ( 12 W) |
полная (W) |
||
|
км |
м. миля |
км |
м. миля |
4 |
18.5 |
10 |
37.0 |
20 |
2 |
11.1 |
6 |
22.2 |
12 |
1 |
7.4 |
4 |
14.8 |
8 |
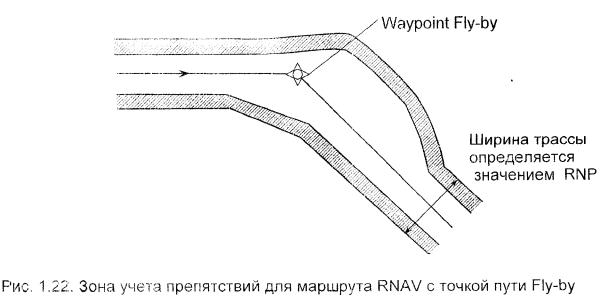
Защитные зоны учета препятствий, связанные с разворотом в точке пути Fly-by,
строятся |
с учетом параметров разворота и влияния ветра во время разворота. |
|
|
Для |
маршрутов |
с типом RNP1 развороты должны производиться с |
фиксирован- |
ным радиусом (RF), |
равным 28 км (15 м. миль) на FL190 и ниже, 41.7 |
км (22,5 м. |
|
миль) на FL200 и выше. Конфигурация защитной зоны учета препятствий имеет сложный вид. На рис. 1.22 показана зона учета препятствий только в одном направ-
лении.
63
Значение минимального запаса высоты над препятствием (МОС), подлежащим
применению в основной зоне при выполнении полета по ППП, составляет 600 м
(2000 фут) над районами возвышенностей или в горных районах и 300 м (1000 фут) в других районах. В дополнительных зонах значение МОС составляет половинное
значение МОС основной зоны. |
|
|
|
|
|
|
|
Фирма Jeppesen на картах ENROUTE |
(H/L) |
для |
региона |
Аляски |
с |
23 |
августа |
200З г. стала публиковать минимальную абсолютную высоту - МЕА GPS. |
Данная |
||||||
высота наносится на участках маршрутов, на |
которых отсутствует |
возможность |
|||||
приема сигналов наземных маяков VOR или |
рабочая |
область |
которых |
в |
горных рай- |
||
онах имеет ограниченную дальность. Рядом со значением опубликованной мини-
мальной абсолютной высоты присутствует буква G, |
пример: 4500G. Ширина зоны |
учета препятствий соответствует RNP2 (см. табл. |
1.13). При рельефе местности |
5000 футов и более МОС в основной зоне - 2000 футов, при меньшей высоте рель-
ефа местности - 1000 футов. В дополнительных зонах значение МОС уменьшается
от указанных значений до нуля.
1.17.Изменение чувствительности индикатора боковых отклонений
Всистемах RNAV индикация отклонения от заданной линии пути в поперечном
направлении индицируется при помощи вертикальной планки на приборе ПНП. При этом цена деления шкалы в километрах или морских милях может устанавливаться вручную или автоматически.
При выполнении полетов в районах действия RNAV важное значение имеет
правильное использование чувствительности ПНП, т.е. установка цены деления крайнего отклонения вертикальной планки. Использование завышенной чувстви-
тельности влечет к необоснованному реагированию на точное выдерживание линии
заданного пути. К примеру, при полете по маршруту в случае установки отклонения
вертикальной планки в крайнее |
положение на 1 км цена одного деления составит 0.2 |
км. Стремление пилота при |
ручном пилотировании выдерживать вертикальную |
планку в центре потребует от него усилий в технике пилотирования. В этой связи
целесообразно |
придерживаться |
рекомендованных значений |
установки чувствитель- |
ности ПНП. |
|
|
|
При полете |
по маршруту |
рекомендуется устанавливать |
чувствительность ± 3.7 |
км (2 м. мили), при этом цена одного деления на шкале ПНП (CDI) будет соответст-
вовать 0.74 км (0.4 м. мили).
64
|
При подлете к аэродрому за 56 км (30 м. миль) от контрольной точки аэродрома |
|||||||||
при |
включении |
режима захода |
на |
посадку |
базовый |
приемник GNSS переключается |
||||
на |
чувствительность |
ПНП (CDI) |
±1.9 км, при этом |
предел |
срабатывания |
сигнализа- |
||||
ции RAIM устанавливается ± 1.9 км. |
|
|
|
|
|
|||||
|
По |
достижении |
расстояния |
до |
FAWP 3.7 |
км предел чувствительности |
ПНП (CDI) |
|||
и RAIM плавно меняется и в FAWP устанавливается |
± 0.6 |
км, соответствующий за- |
||||||||
ходу на посадку. При этом ВС, по крайне мере за 3.7 км до FAWP, должно находить- |
||||||||||
ся с посадочным путевым углом и с отклонением от линии пути не более ± 0.6 км. |
|
|||||||||
|
При |
уходе |
на |
повторный |
заход после |
пролета |
точки |
MAWP чувствительность |
||
ПНП (CDI) изменяется автоматически на ± 1.9 км.
65
2. ФУНКЦИОНАЛЬНЫЕ ДОПОЛНЕНИЯ GNSS |
|
|
|
|
|
|
|||||
2.1. Основные недостатки GNSS |
|
|
|
|
|
|
|
||||
Опыт |
эксплуатации |
систем |
GPS и ГЛОНАСС, как основы |
GNSS, |
показал, что |
||||||
этим системам свойственны следующие недостатки: |
|
|
|
|
|
|
|||||
- чувствительность к умышленным (иногда их называют террористическими), |
|||||||||||
промышленным и атмосферным помехам; |
|
|
|
|
|
|
|
||||
- блокировка |
сигнала при |
затенении |
антенны элементами |
конструкции |
воздуш- |
||||||
ного судна во время выполнения маневра; |
|
|
|
|
|
|
|
||||
- недостаточная точность при использовании для |
целей точного |
захода |
на по- |
||||||||
садку. |
|
|
|
|
|
|
|
|
|
|
|
Указанные недостатки GNSS могут быть устранены при использовании функ- |
|||||||||||
циональных |
дополнений |
GNSS, |
основное |
назначение |
которых - повышение точно- |
||||||
сти, целостности, готовности и непрерывности обслуживания GNSS. |
|
|
|
|
|||||||
2.2. Типы функционального дополнения GNSS |
|
|
|
|
|
||||||
Для преодоления свойственных системам GNSS |
ограничений |
и |
недостатков |
||||||||
системы GPS и ГЛОНАСС должны использоваться с |
различного |
рода |
функциональ- |
||||||||
ными дополнениями. Существуют три типа функциональных дополнений: бортовые, |
|
||||||||||
наземные и спутниковые. |
|
|
|
|
|
|
|
|
|
||
Бортовые |
функциональные |
дополнения |
подразделяются |
на |
|
автономный |
|||||
контроль целостности приемника (RAIM) или автономный контроль целостности на |
|
||||||||||
борту ВС (AAIM). |
|
|
|
|
|
|
|
|
|
|
|
Наземные |
функциональные |
дополнения |
(GBAS) |
с локальной |
зоной |
дейст- |
|||||
вия в пределах до 37 км (20 м. миль) представляют собой контрольные устройства,
размещаемые в аэропорту или в районе аэропорта, в котором |
планируется |
выполне- |
||||||
ние захода на посадку |
по категориям I - III. Наряду с |
локальной |
зоной |
действия, |
||||
GBAS могут быть и с более расширенной зоной действия. Примером такой GBAS |
||||||||
является Австралийская |
наземная |
региональная |
система |
дополнения |
(GRAS), кото- |
|||
рая охватывает территории Австралии и Новой Зеландии. |
|
|
|
|
||||
Спутниковые |
функциональные |
дополнения |
(SBAS). |
Наземные |
функцио- |
|||
нальные дополнения не позволяют охватить все этапы полета и в этой связи для охвата обширных районов в дополнение к космическим сегментам GPS и ГЛОНАСС
используются спутниковые системы, позволяющие передавать дополнительную ин-
формацию.
2.2.1. Бортовые функциональные дополнения
Требования к бортовым функциональным дополнениям изложены в TSO С129 [10], которые многими государствами приняты практически полностью.
Основополагающим положением TSO С129 является наличие в бортовом оборудовании СНС функции RAIM. Выполнение требований TSO-C129 является доста-
точным для использования СНС как дополнительного навигационного средства при
66
выполнении полетов по маршрутам, в |
районе |
аэродрома |
и при выполнении |
заходов |
|||||
на посадку по схемам неточного захода. |
|
|
|
|
|
|
|||
Оборудование, |
сертифицированное |
по техническому стандарту TSO С129, де- |
|||||||
лится |
на |
классы: |
А В, С Знание классов |
оборудования |
необходимо для практиче- |
||||
ских целей, т.к. на картах (схемах) могут |
быть |
указаны ограничения по использова- |
|||||||
нию конкретного класса оборудования (см. на рис. 1.13 примечание 6). |
|
||||||||
Класс А - оборудование, сочетающее в себе навигационный датчик, |
опреде- |
||||||||
ляющий трехмерные координаты ВС: |
широту |
( |
), долготу ( ), высоту (h), |
время |
|||||
(UTC) |
и |
вектор путевой скорости (W), |
а также |
навигационный вычислитель, |
решаю- |
||||
щий навигационные задачи и имеющий ряд сервисных и справочных функций. Это
самый |
распространенный класс |
оборудования |
СНС, которое |
устанавливается |
на |
ВС, |
|||||||
не имеющих бортовых навигационных комплексов последнего |
поколения (КС ПНО, |
||||||||||||
FMS). Для гарантирования целостности в приемник встраивается устройство, обла- |
|||||||||||||
дающее |
функцией автономного |
контроля |
целостности |
в приемнике |
(RAIM) |
(см. |
да- |
||||||
лее). |
|
|
|
|
|
|
|
|
|
|
|
|
|
Оборудование класса А имеет подклассы; А1 и А2. Оборудование подкласса А1 |
|||||||||||||
одобрено для маршрутного полета, полета |
в |
зоне |
аэропорта |
и |
для |
неточного |
захода |
||||||
на посадку. Оборудование подкласса |
А2 одобрено |
для |
маршрутного |
полета |
и |
полета |
|||||||
в зоне аэродрома. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку оборудование СНС |
класса |
А |
является |
также |
и оборудованием |
зо- |
|||||||
нальной навигации, то к нему применяются такие же требования, как и к аппаратуре
зональной навигации.
Класс В - оборудование, состоящее из навигационного датчика и устройства
передачи данных: |
h, UTC, |
W в бортовые навигационные |
комплексы (КС |
ПНО, |
|
FMS). Оборудование класса В можно рассматривать как один из |
датчиков |
много- |
|||
функциональных навигационных |
систем, в которых происходит |
или |
коррекция |
коор- |
|
динат по данным от СНС, или счисление координат по получаемой от СНС информации, и в которых происходит решение всех навигационных и сервисных задач на
более высоком уровне, определяемом возможностями этих систем, как правило,
большими, чем у оборудования класса А.
Оборудование класса В имеет подклассы: В1, В2, ВЗ, В4. В оборудовании под-
классов В1 и В2 предусмотрен |
RAIM. Оборудование подкласса В1 |
позволяет выпол- |
нять маршрутный полет, полет в |
зоне аэродрома и неточный заход |
на посадку, а В2 |
- полет по маршруту и в зоне аэродрома. В оборудовании подклассов ВЗ и В4 дат-
чики объединены, чтобы на уровне ВС обеспечить контроль целостности, |
эквива- |
||
лентный тому, который обеспечивает RAIM. Оборудование подкласса ВЗ позволяет |
|||
выполнять маршрутный |
полет, полет в зоне аэродрома и неточный |
заход |
на по- |
садку, а В4 - полет по маршруту и в зоне аэродрома. |
|
|
|
Класс С - оборудование кпасса С, как и класса В, является датчиком для бор- |
|||
товых навигационных |
комплексов, обеспечивающих автоматический и |
директорный |
|
режим выполнения полета. Взаимодействие с бортовым комплексом всегда двусто-
роннее с целью поддержки всех алгоритмов работы оборудования СНС в процессе
обработки |
информации |
от |
спутников. Таким образом, оборудование класса С |
|
"встроено" в комплексные |
системы |
пилотажно-навигационного оборудования (КС |
||
ПНО, FMS) |
и является |
его |
составной |
частью. В силу этого и ряда других факторов |
оборудование класса С считается более надежным, чем классов А и В. Это оборудование, как правило, не имеет своих органов управления и индикации, а обращение к СНС, управление оборудованием СНС класса С производится через многофунк-
циональные пульты. Оборудование СНС класса С взаимодействует не только с на-
вигационным оборудованием ВС. Как |
датчик параметров полета |
( |
h, |
UTC, W), |
оно используется в системах TCAS, ADS, дисплеях навигационной обстановки, от- |
||||
ветчиках режима S и других. |
|
|
|
|
Оборудование класса С делится |
на подклассы: С1, С2, |
СЗ, |
С4. |
Подклассы |
С1÷С4 соответствуют подклассам ВТ÷В4. |
|
|
|
|
|
67 |
|
|
|

В табл. 2.1 перечислены требования TSO С129 к рассмотренным выше классам оборудования.
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
|
Класс |
|
Нали- |
Инерциальная |
|
|
|
Район полета: |
|
||
|
|
система, обес- |
|
|
|
|
|
|
неточный |
||
|
обору- |
|
чие |
|
океани- |
|
континен- |
|
аэро- |
||
|
|
печивающая |
|
|
|
заход |
|||||
|
дования |
|
RAIM |
|
ческий |
|
тальный |
|
узел |
||
|
|
функцию RAIM |
|
|
|
на посадку |
|||||
|
|
|
|
|
|
|
|
|
|||
|
Класс А - |
GPS-датчик |
и навигационный |
|
вычислитель |
|
|
|
|
|
|
|
А1 |
+ |
|
+ |
+ |
+ |
+ |
||||
|
А2 |
+ |
|
+ |
+ |
+ |
нет |
||||
|
Класс В - GPS-датчик с возможностями интегрирования в навигационной системе |
||||||||||
|
(т.е. КС ПНО (FMS), многофункциональная навигационная система) |
|
|||||||||
|
В1 |
+ |
|
+ |
+ |
+ |
+ |
||||
|
В2 |
+ |
|
+ |
+ |
+ |
нет |
||||
|
ВЗ |
|
|
+ |
+ |
+ |
+ |
+ |
|||
|
В4 |
|
|
+ |
+ |
+ |
+ |
нет |
|||
Класс С - GPS-датчик с возможностями интегрирования в навигационной системе (как в классе В), которая обеспечивает расширенные возможности автоматического и директорного режима полета и уменьшение навигационных ошибок
С1 |
+ |
|
+ |
+ |
+ |
+ |
С2 |
+ |
|
+ |
+ |
+ |
нет |
СЗ |
|
+ |
+ |
+ |
+ |
+ |
С4 |
|
+ |
+ |
+ |
+ |
нет |
Примечание. Знаком "+" указано наличие и возможность.
Функция RAIM. Бортовое оборудование СНС класса А, В и С имеет |
функцию |
||
наблюдения за достоверностью информации, |
получаемой |
от спутников. Ее |
назначе- |
ние: |
|
|
|
- своевременно обнаружить неустойчиво |
работающий |
спутник и исключить его |
|
из обработки для навигационных определений; |
|
|
|
-рассчитать текущую ошибку определения координат и, сравнивая расчетное
значение с максимально допустимой на данном этапе полета, предупредить летный
экипаж о выходе расчетной ошибки за предельные значения;
-определить геометрию спутников в заданной точке, в заданное время и пре-
дупреждать экипаж о том, что требуемая точность и надежность навигации по СНС в
этой точке не будут обеспечены, выдавать сообщение об отказе СНС в целом и невозможности ее использования для навигации.
|
Для решения этих задач бортовое оборудование |
СНС |
должно |
иметь функцию |
||||
RAIM или ее эквивалент (AAIM). |
|
|
|
|
|
|
||
|
Обеспечение этой функции достигается обработкой |
сигналов, как минимум, од- |
||||||
ного |
дополнительного |
спутника. |
Такой алгоритм |
реализован |
в оборудовании |
класса |
||
А1, А2, В1, В2, С1, С2, и он заключается в том, что в целях RAIM производятся не- |
||||||||
сколько независимых |
определений, результаты |
которых |
сравниваются |
между |
собой. |
|||
По |
результатам этих |
расчетов |
определяется |
четыре |
устойчиво работающих |
спут- |
||
ника и по этим "отфильтрованным" спутникам производится определение навигационных параметров (φ, λ, h). При этом "фильтрующие" расчеты при работе RAiM не используются для навигационных расчетов. Но если функция RAIM отфильтровала
один из 5-ти видимых спутников, то RAIM перестает работать, о чем информируется летный экипаж ВС. Воспринимать такую информацию следует так: навигационные
расчеты продолжают выполняться, но они никак не |
контролируются и |
нужно быть |
очень внимательным. Как правило, при пропадании |
RAIM должны быть |
предусмот- |
рены специальные навигационные процедуры. |
|
|
68
Если бортовым оборудованием СНС принимается информация 6 и более спут-
ников, |
то RAIM |
после исключения из обработки одного спутника и подключения дру- |
||||
гого |
продолжает |
работать |
и контролировать |
надежность |
навигационных |
определе- |
ний. |
|
контроль |
целостности на |
борту ВС. |
|
|
Автономный |
Альтернативным |
способом |
||||
контроля достоверности информации, получаемой от СНС, является сравнение этой
информации с навигационной информацией, получаемой от других |
навигационных |
||||
систем, таких как ИНС, LORAN-C, DME. Такой способ реализован в аппаратуре под- |
|||||
класса ВЗ, B4, СЗ, С4 и называется "эквивалент RAIM" или AAIM. Этот способ имеет |
|||||
только одно преимущество по сравнению с RAIM - нет необходимости обрабатывать |
|||||
сигналы от одного |
дополнительного |
спутника, что позволяет продолжать навигаци- |
|||
онные определения с гарантией их |
достоверности |
при |
видимости только 4-х спутни- |
||
ков. |
|
|
|
|
|
Использование |
информации о |
барометрической высоте при стыковке оборудо- |
|||
вания СНС с датчиком высоты производится в целях: |
|
|
|
||
- "согласования" |
навигационных |
определений, |
что |
существенно |
ускоряет про- |
цедуры математической фильтрации; |
|
|
|
|
|
-"поддержки" RAIM, когда барометрическая высота используется как сфера положения только для алгоритма RAIM и только в тех случаях, когда нет возможности
осуществить RAIM по пятому спутнику (т.е. обрабатываются сигналы только от 4-х спутников);
-"поддержки" навигационных определений, когда барометрическая высота ис-
пользуется как сфера положения в режиме "Approach" (при вводе давления QNH) и
при условии, что видимых спутников не хватает для работы оборудования в режиме "3D", т.е. при видимости 3-х спутников. При этом, как только в обработку включается 4-й спутник, навигационные определения (<р, Л, h, UTC, W) производятся по этим 4-м спутникам, а барометрическая высота поддерживает RAIM и выполняет функцию
сглаживания.
Стыковка оборудования СНС с высотомером носит рекомендательный характер при использовании СНС как дополнительного навигационного средства. Но с переходом СНС в статус основного и самодостаточного средства навигации такая стыковка является обязательной в целях снижения вероятности прерывания RAIM.
Соблюдение требований TSO С129 является обязательным для бортового обо-
рудования СНС, |
устанавливаемого на воздушных судах, выполняющих полеты по |
ППП. Исключение |
составляет применение не сертифицированных по TSO приемни- |
ков СНС при выполнении полетов по ПВП, когда соблюдаются все правила и процедуры их выполнения, а оборудование СНС используется для обеспечения навигации
в районах, где наземные навигационные средства отсутствуют или ненадежны. Ка-
ких-либо требований к не сертифицированной аппаратуре не предъявляется, т.к. ее
использование ограничено |
строгим |
выполнением |
установленных |
правил |
и процедур |
||||
ПВП, такой способ использования |
приемников |
СНС |
считается |
"вспомогательным" и |
|||||
не влияет ни на ПВП, ни на процедуры при выполнении визуальных полетов. |
|
|
|||||||
При использования |
оборудования СНС |
в |
качестве |
основного |
навигацион- |
||||
ного средства, в дополнение к требованиям |
TSO С129 применяются наземные |
||||||||
(GBAS) и спутниковые функциональные дополнения (SBAS). |
|
|
|
|
|||||
В наземных и спутниковых функциональных |
дополнениях |
важное |
место |
отво- |
|||||
дится повышению точности определения места |
ВС |
путем |
дифференциального |
ме- |
|||||
тода корректировки спутникового сигнала. |
|
|
|
|
|
|
|
||
69