

RNAV-Вовк В.И., Липин А.В., Сарайский Ю.Н
.pdfПРИЛОЖЕНИЕ D к TGL10. ВЕРТИКАЛЬНАЯ НАВИГАЦИЯ
1.Настоящий Материал не устанавливает критерии сертификации систем вертикаль-
ной навигации, но приводимые ниже положения позволят более полно понять все навигаци-
онные функции систем и отношение VNAV к нормативным позициям настоящего докумен-
те.. Летный экипаж должен четко представлятв себе возможности режима вертикальной навигации и/или управления вертикальной скоростью, особенно в контексте обеспечения не-
прерывного профиля снижения.
2.Для решения задач вертикальной навигации система сравнивает вертикальное поло-
жение ВС, определяемое как барометрическая высота, с заданным вертикальным профилем, рассчитанным системой RNAV-VNAV по заданным значениям высот, углов наклона траекторий или профилям полета. Отклонение от заданного профиля полета выводится на сле-
дующие типы систем и индикаторов, по которым и осуществляется управление ВС в вертикальном плане:
-Vertical Profile Deviation Indicator - индикатор отклонений от вертикального профиля;
- |
Vertical Profile Display |
- дисплей вертикального профиля; |
- |
Automatic Thrust System |
- автомат тяги; |
- |
Flight Director |
- система директорного управления; |
- |
Automatic pilot |
- автопилот. |
3.Некоторые системы имеют возможность определять оптимальный профиль набора или снижения в зависимости от летно-технических. характеристик ВС (включая характеристики двигателей), веса, скорости, основных метеорологических параметров, принятой экс-
плуатантом практики в отношении экономичности полетов и опубликованных значений за-
данных высот и скоростей для конкретной процедуры вылета/прибытия/захода на посадку.
4.Возможность VNAV не является обязательной для P-RNAV. Конфигурация оборудования кабины пилотов и подготовка экипажа должна позволять выдерживать вертикальный
профиль полета, управляя самолетом вручную по традиционным средствам.
5.Если процедура VNAV не опубликована или ее выполнять не требуется, право выбирать вертикальный профиль полета между двумя точками с заданными высотами всегда при-
надлежит пилоту. Однако обязанность летного экипажа - по возможности обеспечивать оп-
тимальный режим вертикального маневра. При этом он должен определить, каким из возможных методов он обеспечит выход на заданный профиль полета. Но когда требуется выполнить опубликованную процедуру VNAV, летный экипаж должен пилотировать ВС в соответствии с ее заданными вертикальными элементами.
6.GNSS используется только как система горизонтальной навигации и ее использование для вертикальной навигации не является предметом рассмотрения в данном Материале.
7.Детальное описание функциональных и технических требований для VNAV и ее от-
ношение к RNP-RNAV можно найти в документах EUROCAE ED-75A / RTCA DO-236A.
110
2. РАСПОРЯЖЕНИЕ МИНТРАНСА РФ ПО ВОПРОСУ P-RNAV
Овведении в действие Рекомендаций по подготовке воздушных судов
иэксплуатантов гражданской авиации России к полетам в системе точной
зональной навигации P-RNAV в Европейском регионе по требованиям RNP1
Распоряжение МТ РФ от 04.02.03 № НА-21-р
С целью обеспечения выполнения требований самолетовождения в условиях точной зональной навигации и в соответствии с решением Европейской конференции гражданской
авиации об обязательном оснащении воздушных судов оборудованием точной зональной навигации P-RNAV для полетов в отдельных аэроузловых зонах в назначенном воздушном пространстве Европы с марта 2003 г., ПРЕДЛАГАЮ:
1.Ввести в действие Рекомендации по подготовке воздушных судов и эксплуатантов граясданской авиации России к полетам в системе точной зональной навигации P-RNAV в
Европейском регионе по требованиям R.NP1 (приложение к настоящему распоряжению).
2.Департаменту поддержания летной годности гражданских воздушных судов и тех-
нического развития гражданской авиации совместно с ГосНИИ "Аэронавигация" организовать работы по анализу и оценке соответствия навигационных характеристик эксплуатируе-
мых типов и групп воздушных судов с одинаковым составом навигационного оборудования
нормативным требованиям по обеспечению полетов в системе точной зональной навигации
P-RNAV и подготовке соответствующих заключений.
3.Начальнику Управления государственного надзора за безопасностью полетов, руководителю Департамента летных стандартов оформлять допуск заявленных эксплуатантами воздушных судов к полетам в системе точной зональной навигации P-RNAV в установлен-
ном порядке.
4.Рекомендовать руководителям авиапредприятий, авиакомпаний, эксплуатирующих воздушные суда в Европейском регионе, организовать изучение вводимого документа, обеспечить подготовку воздушных судов и их экипажей к полетам, а также получение допуска для полетов в установленном порядке.
5.Контроль за выполнением настоящего распоряжения возложить на руководителя Департамента поддержания летной годности гражданских воздушных судов и технического
развития гражданской авиации.
Первый заместитель Министра |
А.В. Нерадько |
111
Данное Приложение авторы представили без каких-либо правок по оформлению и содержанию.
Приложение к распоряжению Минтранса России от 04 февраля 2003 г. № НА-21-р
РЕКОМЕНДАЦИИ
по подготовке воздушных судов и эксплуатантов гражданской авиации России
кполетам в системе точной зональной навигации P-RNAV
вЕвропейском регионе по требованиям RNP1
ВВЕДЕНИЕ
Основной целью данного Руководства является установление порядка по выполнению
основных требований по допуску гражданских воздушных судов России к полетам в системе
точной зональной навигации P-RNAV в Европейском регионе при действии нормативов RNP1.
В Руководстве также приведены требования к функциям, которые должны быть реали-
зованы бортовой системой P-RNAV, требования к эксплуатации этих систем и их аэронави-
гационному обеспечен ию.
Процедуры точной зональной навигации P-RNAV в районе аэродрома являются дальнейшим: развитием концепции применения зональной навигации в Европейском регионе. Их введение является необходимым промежуточным шагом на пути увеличения пропускной способности воздушного пространства и достижения преимуществ, обусловленных гибко-
стью задаваемых маршрутов движения ВС.
Государства - члены Европейской комиссии по вопросам гражданской авиации (ЕКГА) приняли решение об обязательном оснащении воздушных судов оборудованием точной зональной навигации P-RNAV, навигационная точность которого отвечает требованиям RNP1 для полетов в назначенном воздушном пространстве в Европе, планируемого в отдельных аэроузловых зонах с марта 2003 года. Ожидается, что процедуры P-RNAV будут постепенно заменяться на процедуры RNP-RNAV, введение которых ожидается примерно с 2005 года и
которые, в отличие от процедур P-RNAV, будут оговаривать все аспекты требуемых навига-
ционных характеристик (RNP) в соответствии с документами ИКАО 9613 и 9650, а не только требований выдерживания заданных линий положения.
Концепция требуемых навигационных характеристик RNP - новый, прогрессивный
способ формулирования требований к навигационным характеристикам, которым должно
удовлетворять воздушное судно в пределах некоторого района воздушного пространства в течение как минимум 95% времени полета.
RNP для маршрутных полетов определяется как "уровенв точности навигации, необходимый в рамках заданного воздушного пространства" и предусматривает возможность использования на воздушном судне различных навигационных систем. При этом должны обес-
печиваться требуемые характеристики целостности, непрерывности.
Требования RNP должны удовлетворяться также при выполнении полетов в системе
зональной навигации RNAV, т.е. при выполнении полетов по любой желаемой линии пути в
пределах зоны действия радионавигационных средств или в пределах возможностей авто-
номных средств, или совместного использования этих средств.
Настоящий документ содержит как функциональные и эксплуатационные требования,
соответствующие публикациям Евроконтроля по принципам разработки зональных процедур в районе аэродрома при их использовании для выполнения процедур P-RNAV, так и основ-
ные положения и требования в отношении одобрения технических характеристик систем зональной навигации к их использования для выполнения процедур RNP1-RNAV.
112
При этом в настоящем документе разработаны унифицированные процедуры получения
одобрения на выполнение полетов в системе P-RNAV. Уточненные функциональные и эксплуатационные требования в процедурах RNP1-RNAV планируется оформить Приложением к данному документу по завершению разработки соответствующих нормативных докумен-
тов Евроконтролем, ЕКГА и JAA.
Разрешение на выполнение полетов в системе P-RNAV (RNP1 -RNAV) .выдается госу-
дарством эксплуатакта ВС с подтверждением наличия на ВС оборудования, возможности которого соответствуют RNP1, при этом выполняются соответствующие функциональные и эксплуатационные требования P-RNAV (RNP1-RNAV).
Разрешение должно выдаваться каждому отдельному эксплуатанту, а также типу воздушных судов с одинаковым составом навигационного оборудования.
1. ОПРЕДЕЛЕНИЯ
Зональная навигация RNAV - метод навигации, который позволяет воздушному судну выполнять полет по любой желаемой линии пути в пределах зоны действия радионавигационных средств или в пределах возможностей автономных средств, или совместного использования этих средств.
Зональная навигация RNP1 RNAV- навигация с применением основных средств зональной навигации в соответствии с требованием RNP1, т.е. не менее 95% полетного времени ВС
должно находиться в пределах ±1.0 м.мили от заданной линии пути (стандарт EUROCONTROL).
Оборудование RNAV - комплекс навигационного оборудования, используемого для
обеспечения полетов в системе зональной навигации.
Точность - степень соответствия расчетного, измеренного или желаемого местополо-
жения в данный момент от его истинного местоположения.
Удерживание - группа взаимосвязанных параметров, используемых для определения характеристик RNP RNAV навигационной системы. Этими параметрами являются целостность, непрерывность и регион удерживания.
Целостность удерживания - степень достоверности местоположения, выраженного в
виде вероятности того, что система определит и оповестит о состоянии, когда обшая погрешность системы (TSE) больше, чем предел бокового удерживания (удвоенная величина RNP). Целостность удерживания определяется максимальной допустимой вероятностью события, при котором TSE больше предела удерживания и это состояние не выявлено.
Непрерывность удерживания - способность всей системы соответствовать требованию
целостности удерживания без незапланированных перерывов в предполагаемой работе (полной утраты навигационной способности к RNP RNAV; отказе системы, предупреждающей об утрате навигационной способности к RNP RNAV; ложном оповещении об утрате такой навигационной способности при удовлетворительной работе системы).
Регион удерживания - регион с центром на желаемой траектории, на который заданы
целостность и непрерывность удерживания.В настоящем документе устанавливаются только требования по удерживанию в поперечном плане, которые определяются боковым пределом
удерживания.
2. РЕКОМЕНДУЕМЫЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ВОЗДУШНЫМ СУДАМ ДЛЯ ПОЛЕТОВ В СИСТЕМЕ ТОЧНОЙ ЗОНАЛЬНОЙ НАВИГАЦИИ (P-RNAV) В ЕВРОПЕЙСКОМ РЕГИОНЕ ПРИ ДЕЙСТВИИ НОРМАТИВОВ RNP1
2.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Настоящие технические требования к бортовым системам сформулированы на основании следующих УСЛОВИЙ, принятых полномочными органами в области использования воздушного пространства в целях обеспечения безопасного выполнения процедур P-RNAV в Европейском регионе:
113
При этом все процедуры P-RNAV при действии требований RNP1:
•отвечают требованиям соответствующих Документов ИКАО;
•построены в соответствии с нормативными положениями Документов Евроконтроля;
•все маршруты и процедуры построены в системе координат WGS-84;
•не влекут обязательного применения вертикальной (зональной) навигации и подтвер-
ждают возможность использования традиционных методов вертикального эшелонирования и
на опубликованных схемах содержат фиксированные данные (например, пеленг и дальность до радионавигационного средства), по которым экипаж может контролировать прохождение
определенных точек процедуры;
•полномочным органом в области использования воздушного пространства исследованы, если требуется -- облетаны, и признаны удовлетворительными как построение самой
процедуры, так и навигационная инфраструктура (с учетом необходимости использования
дополнительных навигационных средств). При этом демонстрируется способность ВС адекватно и. полностью выполнить данную процедуру.
•если процедурой предусмотрена возможность выбора датчиков навигационной ин-
формации, например, DME/DME, VOR/DME или GNSS, то обеспечение защиты от препятст-
вий должно учитывать наихудшую точность из выбираемых;
•если для выполнения конкретной процедуры для достижения требуемой навигационной характеристики необходимо использовать определенное навигационное средство, - это
средство должно быть указано в АИП и на соответствующих публикуемых картах (схемах).
Если какое-либо навигационное средство не должно использоваться при выполнении данной процедуры - это также публикуется в АИП и на соответствующих картах (схемах);
•если какое-либо навигационное средство (включая космический сегмент GNSS) обозначено в АИП и на соответствующих картах (схемах) как обязательное для выполнения
данной процедуры P-RNAV, такое средство контролируется и поддерживается исправным. Если такое средство оказывается нерабочим - выпускается соответствующее извещение (NОТАМ) о невозможности выполнения данной процедуры P-RNAV;
•для процедур, основанных исключительно на GNSS. полномочным органом в области использования воздушного пространства определен уровень допустимого риска потери различными ВС возможностей P-RNAV из-за отказов спутников или прерывания RAIM. Анало-
гичная оценка риска выполняется и для различных процедур P-RNAV, поддерживаемых
только одним маяком DME:
•в АИП указаны опасные особенности какой-либо воздушной зоны, необходимые нештатные процедуры на случай потери различными ВС возможностей P-RNAV, и если это
признано необходимым, требование иметь два комплекта оборудования P-RNAV. Такие ус-
ловия могут оговариваться для конкретных процедур P-RNAV, которые, например, предусматривают снижение ниже безопасной высоты пролета препятствий или не обеспечены в
достаточной степени радиолокационным контролем;
•когда процедуры при нештатных ситуациях предусматривают радиолокационную поддержку полета, требование о радиолокационном обслуживании указано в АИП, характеристики радиолокатора продемонстрированы и они соответствуют его назначению;
•опубликована фразеология радиообмена, применяемая при ввшолнении процедур Р-
RNAV;
•радионавигационные средства, не соответствующие Приложению 10 ИКАО (напри-
мер, TACAN), исключены из АИП.
2.2.ТРЕБОВАНИЯ К ХАРАКТЕРИСТИКАМ ВОЗДУШНЫХ СУДОВ,
ОСНАЩЕННЫХ ОБОРУДОВАНИЕМ ТОЧНОЙ СИСТЕМЫ ЗОНАЛЬНОЙ НАВИГАЦИИ P-RNAV В СООТВЕТСТВИИ С ТРЕБОВАНИЯМИ RNP1
2.2.1. Требования к точности
При полетах по маршрутам или в аэродромных зонах, обозначенных как маршруты или
зоны: только для ВС, оборудованных системами P-RNAV, точность выдерживания траекто-
114
рии в горизонтальной плоскости в течение 95% полетного времени должна быть не ниже
±1.85 км (±1,0 м. миля).
Точность выдерживания линии заданного пути в боковом измерении представляет со-
бой сочетание погрешностей навигационной системы (сумма погрешностей в расчете задан-
ной траектории, погрешности определения координат и погрешности вывода информации на
индикацию) и погрешности пилотирования FTE. Это соответствует требованию по точности
RNP1.
Точность выдерживания в продольном измерении представляет собой сочетание по-
грешности навигационной системы, погрешности программирования и погрешности систе-
мы отображения.
Для подтверждения соответствия требованию по точности необходимо продемонстрировать, что суммарная погрешность самолетовождения TSE в каждом измерении не должна
превышать норм ±1,85 км (±1,0 м. миля) в течение 95% полетного времени на любом участке
одного полета:
a)истинное местоположение воздушного судна должно быть в пределах 1,85 км (1,0 м. мили) относительно заданной линии пути маршрута полета; и
b)истинное расстояние до точек пути должно быть в пределах 1,85 км (1,0 м. мили) от
отображаемого расстояния до точек пути.
Под суммарной ошибкой самолетовождения (Total System Error - TSE) для маршрутов
RNP подразумевается сумма трех составляющих:
TSE = РЕЕ + PDE + FТЕ
где РЕЕ - ошибка измерения координат (Position Estimation Error),
PDE - ошибки программирования маршрута (Path Definition Error), FTE - ошибка пилотирования (Flight Technical Error).
2.2.2. Целостность
В отношении самой бортовой системы: вероятность одновременного появления на индикаторах обоих пилотов опасно ложной навигационной информации или ошибочного по-
ложения относительно заданной траектории должна быть маловероятной (1 – 10-7 на час полета) .
Вероятность того, что общая ошибка самолетовоясдения (TSE) становится больше пре-
дела удерживания (удвоенная величина RNP) без распознавания системой или пользовате-
лем, должна быть менее (1 - 10-5 на час полета) (для RNP1 RNAV).
2.2.3. Непрерывность обслуживания
Вотношении самой бортовой системы должно быть подтверждено, что:
-потеря всей навигационной информации должна быть маловероятным событием (1 - 10-7 на час полета),
-невосстанавливаемая потеря всех навигационных функций и связи должна быть практически невероятным: событием (1 - 10 -9 на час полета),
-вероятность потери текущей способности к RNPl RNAV или того, что сигнализация об этом ложная, должна быть менее (1 - 10-4 на час полета).
2.2.4. Готовность (прогноз целостности)
Готовность представляет собой показатель способности системы обеспечивать надлежащее обслуживание в пределах установленной зоны действия и определяется в виде интервала времени, в течение которого система должна использоваться для навигации, в процессе которой предоставляется достоверная навигационная информация летному экипажу, а также
в систему автоматического управления полетом воздушного судна в виде управляющих сигналов. Термин "Готовность" относится только к способности системы отвечать всем требо-
ваниям к типу RNP1 до входа в зону действия P-RNAV.
115
3. ТРЕБОВАНИЯ К СОСТАВУ НАВИГАЦИОННЫХ СИСТЕМ
3.1.СИСТЕМЫ ЗОНАЛЬНОЙ НАВИГАЦИИ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ
3.1.1.Для навигации в горизонтальной плоскости бортовое оборудование RNAV должно позволять выполнять предписанные инструкции и выдерживать маршрут из точек пути,
хранящихся в бортовой базе данных.
3.1.2.В рамках настоящего документа выполнение полета в системе P-RNAV преду-
сматривает использование такого оборудования RNAV, которое автоматически определяет
горизонтальные координаты ВС по следующим навигационным датчикам (без каких-либо приоритетов и последовательности):
-дальномерное оборудование, работающее по двум и более наземным маякам
(DME/DME);
-угломерно-дальномерное оборудование, работающее по совмещенному маяку
VOR/DME, если такой маяк определен как удовлетворяющий требованиям для данной про-
цедуры;
-глобальная навигационная спутниковая система (GNSS);
-инерциальные навигационные системы (INS или IRS) с автоматической коррекцией от
подходящей радионавигационной системы, инерциальные навигационные системы (INS) с ограничениями, приведенными в разделе 5.4.
Примечание. Система GNSS означает:
-бортовое оборудование GPS с барометрической поддержкой работы и функцией RAIM, либо оборудование GPS с бортовой системой функционального дополнения
ABAS или спутниковой системой функционального дополнения SBAS (EGNOS);
-совмещенное бортовое оборудование ГЛОНАСС/GPS, сертифицированное в соответствии с КТ-34-01.
3.1.3. Вычислитель системы рассчитывает такие навигационные параметры, как ЗПУ и расстояние от текущего места до пункта маршрута (WPT), положение относительно линии
заданного пути, выводит на индикацию и в системы управления информацию и сигналы, позволяющие выдерживать заданную траекторию полета.
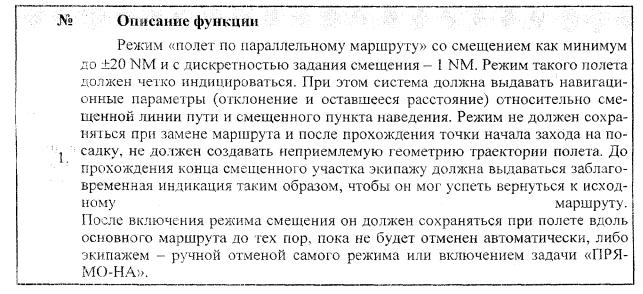
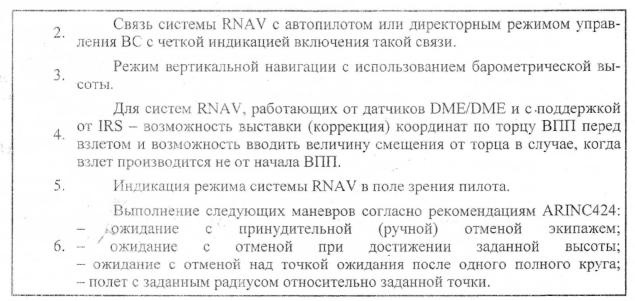
4.2.РЕКОМЕНДУЕМЫЕ ФУНКЦИИ
Втабл. 4.2. представлены рекомендуемые функции для выполнения полетов P-RNAV.
Таблица 4.2
Рекомендуемые функции
116
5.СПОСОБЫ ПОДТВЕРЖДЕНИЯ СООТВЕТСТВИЯ ТЕХНИ ЧЕСКИХ ХАРАКТЕРИСТИК
5.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Оценка характеристик конкретного оборудования, установленного на борту ВС, и под-
тверждение их соответствия требованиям настоящего раздела должна производиться, по мере возможности, одновременно с анализом эксплуатационных процедур, разработанных в соответствии с разделом "Эксплуатационные критерии", принимая во внимание процедуры, как при штатных, так и при нештатных ситуациях. Приводимые ниже инструкции по под-
тверждению соответствия предполагают, что ВС имеет штатное оборудование для полетов
по ППП согласно Федеральным авиационным правилам производства полетов гражданских воздушных судов.
5.1.1. Новое или доработанное оборудование, установленное на ВС
При подтверждении соответствия настоящему документу следует соблюдать следую-
щие специальные положения:
(a)Заявитель представляет в уполномоченный орган доказательную документацию, в которой указывается, каким образом соблюдаются требования настоящего документа. Документация должна быть разработана в соответствии с Планом, предварительно согласован-
ным с ГосНИИАН и АРМАК. В этом Плане должны быть указаны данные, которые должен
представить заявитель для сертификации, включая, при необходимости, описание навигационных систем и подтверждение выполнения мероприятий, предписанных нижеследующими
пунктами.
(b)Соответствие техническим требованиям может быть подтверждено непосредственно
сертификацией оборудования, анализом безопасности применения системы, подтверждением безопасного уровня соответствующего программного обеспечения (согласно п. 2.2), анали-
зом технических характеристик и совокупностью наземных и летных испытаний. В дополнение к заявке на сертификацию предоставляется конструкторская документация в той части, которая подтверждает соблюдение основных положений и критериев разделов 2 и 4 настоя-
щего документа.
(c)Непосредственно эксплуатация системы RNAV и организация индикации в кабине пилотов управляющих сигналов по горизонтальной и вертикальной навигации должны быть
сценены на предмет минимизации вероятности ошибок экипажа. В частности, при выходе на
117
посадочную прямую должна быть обеспечена возможность одновременно контролировать
индикаторы системы RNAV и ILS.
(d)Сценарии действий при отказах навигационных датчиков и системы RNAV оцени-
ваются на предмет обеспечения возможности перехода на традиционные средства навигации
ичто при этом не возникнет путаницы с коммутацией индикаторов (например, VOR № 2 на
HSI № 1) и, как следствие, ошибочное восприятие информации экипажем. Такая оценка
должна учитывать также и возможные отказы переключателей и коммутаторов.
(г) Оцениваются связи системы RNAV с автопилотом и системой директорного режима управления ВС а также обеспеченность экипажа четкой и однозначной индикацией о вклю-
чении и отключении этих режимов и отказах системы RNAV.
(f)Должно быть продемонстрировано, что возможно выполнение всех видов маневров, предписанных разделом 4 табл. 1 п. 18 и табл.2 п.6 (если реализованы), без вмешательства
экипажа, т.е. без необходимости выключать, вручную выставлять заданный путевой угол и
повторно включать режим RNAV. При этом не должна ограничиваться возможность вмешательства экипажа в работу системы при необходимости.
5.1.2. Штатное оборудование
Заявитель представляет в уполномоченный орган доказательную документацию, в ко-
торой указывается, каким образом соблюдаются критерии настоящего документа при использовании штатного оборудования. Соответствие может быть подтверждено его инспекци-
ей, во время которой проверяется, что требуемые функции и связи действительно работают.
Согласно раздела 2, технические характеристики и критерии целостности могут подтверждаться ссылками на соответствующие записи в РЛЭ ВС или другие применяемые одобре-
ния и дополняющие их сертификационные данные. При отсутствии в эксплуатационной документации соответствующих подтверждений требуется проведение дополнительных исследований и летных испытаний.
5.2. ЦЕЛОСТНОСТЬ (ДОСТОВЕРНОСТЬ) БАЗЫ ДАННЫХ
База дачных, в том числе порядок ее обновления, должна быть одобрена уполномоченным органом на основе требований, указанных в EUROCAE ED-76/RTCA DO-200A.
5.3. ИСПОЛЬЗОВАНИЕ ОБОРУДОВАНИЯ GNSS
5.3.1.Использование оборудования GNSS для выполнения процедур P-RNAV возмож-
но, если оно сертифицировано авиационными властями страны разработчика по TSO-C145 и TSO-146, либо JTSO-C129a/ TSO-C129 ( ) или сертифицировано АР МАК по КТ-34-01. Оборудование должно быть класса A1, В1, C1, ВЗ или СЗ и быть доработано для выполнения всех требуемых функций, предписанных в разделе 4, табл. 4.1 настоящего документа. Функ-
ция RAIM или ее эквивалент в мультисенсорных системах также должны быть обеспечены.
5.3.2.Автономное оборудование GNSS для соблюдения критериев P-RNAV при заполнении заявки согласно п. 5.1.1 (а) должно отвечать следующим требованиям:
а) должно быть сертифицировано по TSO-129a или по TSO-129 и дополнительно по п. п.
(а).(З), (xv).(5) и (а).(6) из TSO-129a, или по требованиям АР МАК КТ-34-01;
б) при наличии других навигационных систем, кроме автономного оборудования GNSS,
должно быть предусмотрено:
- наличие селектора навигационных систем;
- наличие признака выбранной навигационной системы;
- индикация режима выбранной навигационной системы;
-выдача управляющих сигналов от выбранной навигационной системы в директорный
прибор или автопилот;
в)потеря навигационной функции должна индицироваться экипажу;
г) отказ данных о введенной в оборудование GNSS высоте должен индицироваться оборудованием GNSS;
118
д) ввод установочных данных в оборудование GNSS (тип эллипсоида, порт вво-
да/вывода, значения высоты антенны, выбор калибровки внешнего индикатора CDI) не должен выполняться пилотом. Эти данные должны быть приведены в соответствующем руководстве;
е) средства контроля и индикации, эксплуатационные процедуры и возможность самолетовождения по данным GNSS должны быть оценены экипажем в ОУЭ.
5.4. ИСПОЛЬЗОВАНИЕ ИНЕРЦИАЛЬНЫХ СИСТЕМ
Допускается использование инерциальных систем в качестве датчиков определения координат в течение обоснованных периодов времени, когда автоматическое определение координат по радионавигационным системам невозможно из-за отказов или прерывания ра-
диосигнала. При отсутствии индикации целостности определения координат заявитель должен определить, как долго будет обеспечена требуемая точность при переходе навигацион-
ной системы в режим работы только по инерциальным данным. Необходимо рассмотреть как полет непосредственно после взлета, так и маневрирование в районе аэродрома в целом. При этом: может потребоваться отнести такую навигацию к процедурам при нештатных ситуаци-
ях. Ограничения могут быть обоснованы на модели допустимого дрейфа платформы.
5.5. СОВМЕСТИМОСТЬ ОБОРУДОВАНИЯ
Разные конфигурации навигационных систем с многовариантными органами управления могут создавать проблемы, связанные с различиями как методов работы с оборудовани-
ем, так и форматов отображаемой информации. Такие проблемы могут возникать и при пу-
танице с различными версиями программного обеспечения одного и того же оборудования.
Что касается захода на посадку - многовариантность (смешивание) оборудования P-RNAV недопустима.
При установке на борту ВС двух и более навигационных систем необходимо, как минимум, учитывать приведенные ниже принципы совместимости, особенно для таких пилотских кабин, архитектура которых позволяет производить перекрестные подключения (на-
пример, когда к дисплею № 1 можно подключить GNSS-2).
(a)Ввод данных: если на борту установлены две навигационные системы, то методы ввода данных должны быть совместимы, а алгоритмы решения основных задач - похожи. Любые отличия должны быть исследованы на предмет увеличения рабочей нагрузки на эки-
паж. Если экипаж допустил процедурную ошибку (например, при вводе данных, полученных
от дублирующей системы, в рабочую систему), то это не должно привести к появлению ложной информации, а ошибка должна быть легко обнаружена и устранена.
(b)Масштабирование индикаторов боковых отклонений (двух систем) должно быть
синхронным либо об изменении масштабов должны выдаваться предупреждения.
(c)Символы дисплеев и индикация режимов работы: не должно быть противоречивых символов и табло (например, один и тот же символ в разных системах не должен использоваться с различным смыслом). Отличия в символах и индикации должны быть исследованы на предмет возможности возникновения путаницы.
(d)Логика режимов: режимы взаимодействующего (с навигационной системой)
оборудования и его связи с другим оборудованием ВС должны быть совместимы.
(e)Отказ оборудования: отказ одной из систем не должен приводить к появлению лож-
ной информации.
(f)Отображение данных: отображение основных навигационных параметров должно
производиться в одних и тех же единицах измерения и с одинаковыми символами. Любое
несоответствие в отображении основных навигационных параметров (двумя системами) не
может быть одобрено (сертифицировано).
(g)Различия в базах данных: ввиду возможности конфликта двух баз данных любые
отличия в них недопустимы.
119