

RNAV-Вовк В.И., Липин А.В., Сарайский Ю.Н
.pdfCF25L |
точка в створе ВПП 25L, публикуется на картах фирмы Jeppesen в ви- |
де [CF25L]; |
|
FF25L - FAWP при заходе на ВПП 25L;
N25НР -HWP (Holding Fix) над NDB при заходе на ВПП 25.
При маневрировании по этим точкам летный экипаж не должен использовать их
названия при ведении радиосвязи с диспетчером ОВД. |
После окончательного пере- |
|||
хода на процедуры RNAV и изъятия из АИП |
и баз данных навигационных систем |
|||
"наложенных" процедур типа GPS-OVERLAY |
Approach, |
потребность |
в |
'computer |
navigation-fixes' отпадет, т.к. все точки будут именоваться в единой системе. |
|
|
||
Символы различных WPT, применяемые в |
публикациях ИКАО и |
АИП, |
даны в |
|
табл. 17. |
|
|
|
|
1.13.Типы маневров RNAV в районе аэродрома
1.13.1.Указатели окончания траекторий
При разработке структуры воздушного пространства с позиции заданных траекторий полета воздушных судов используются только два типа участков маршру-
тов: прямолинейная траектория или криволинейная между определенными точками. Использование указанных типов маршрутов позволяет:
- обеспечить программирование (кодирование) заданных траекторий полета в базах данных и вычислителях оборудования RNAV;
- создать надежные, повторяемые и предсказуемые траектории.
Корпорацией ARINC была разработана концепция "Path Termination" (Указатель
окончания траектории), которая любую процедуру при полете по маршруту в районе аэродрома (SID, STAR, IAP) разбивает на отдельные участки 23-х типов, каждый из которых однозначно определен с помощью признака "Path Terminator". Большинство навигационных систем RNAV реализуют, как правило, только часть из 23-х 'Path
Terminators', но и для P-RNAV требуется далеко не весь их перечень.
Таблица 1.7
Символы точек пути
Path Terminator образуется из двух заглавных букв - первая характеризует заданную траекторию полета, а вторая показывает, где или как кончается данный уча-
сток траектории полета. В табл. 1.8 представлен принцип кодирования типов участ-
ков окончания траекторий в соответствии с ARINC 424.
40
Далее рассмотрены только те участки траекторий из Path Terminators, которые требуются и рекомендуются при выполнении полетов P-RNAV согласно [13].
Требуется выполнять маневры и выдерживать следующие типы траекторий:
-IF - выход на точку из любого текущего места ВС;
-TF - полет по линии пути, соединяющей две последовательные точки ЛЗП;
-CF - полет на точку с заданным путевым углом;
-FA - полет от точки с заданным путевым углом до достижения заданной высо-
ты;
- DF - полет от текущего места ВС прямо на точку без заданного путевого угла.
Таблица 1.8
Принцип кодирования типов участков окончания траекторий
Первый |
Наименование |
Применяемое |
Второй |
Наименование |
Применяемое |
символ |
траектории |
кодирование |
символ |
траектории |
кодирование |
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
А |
Constant DME arc |
AF |
A |
Altitude |
CA, FA, HA, VA |
С |
Course to |
CA, CD, CF, CI, CR |
С |
Distance |
FC |
D |
Computed track |
DF |
D |
DME distance |
CD, FD, VD |
F |
Course from fix to |
FA, FC, FD, FM |
F |
Fix |
AF, CF,DF,HF, |
|
|
|
|
|
IF, TF, RF |
Н |
Holding pattern |
HA, HF, HM |
1 |
Next leg |
PI-CF, VI |
|
terminating at |
|
|
|
|
I |
Initial Fix |
IF |
M |
Manual |
FM, HM, VM |
|
|
|
|
termination |
|
Р |
Procedure |
PI-CF |
R |
Radial |
CR, VR. |
|
|
|
|
termination |
|
R |
Constant Radius |
RF |
|
|
|
Т |
Track between |
TF |
|
|
|
V |
Heading to |
VA, VD, VI, VM, VR |
|
|
|
Примечание. Жирным наклонным шрифтом выделены участки траекторий,
применяемые при использовании RNAV.
Рекомендуется выполнять маневры и выдерживать следующие типы траекто-
рий:
- НМ - полет по процедуре ожидания до ее принудительной (ручной) отмены;
- НА - полет по процедуре ожидания с отменой при достижении заданной высоты;
-HF - полет по процедуре ожидания с отменой над Holding Fix после одного
круга;
-RF - полет с заданным радиусом относительно заданной точки.
Описание кодированных точек и типов траекторий для зональной навигации Р-
RNAV и RNP-RNAV в соответствии с ARINC 424 дано в табл. 1.9.
Остальные 14 участков траекторий не применяются в процедурах P-RNAV и RNP-RNAV.
41
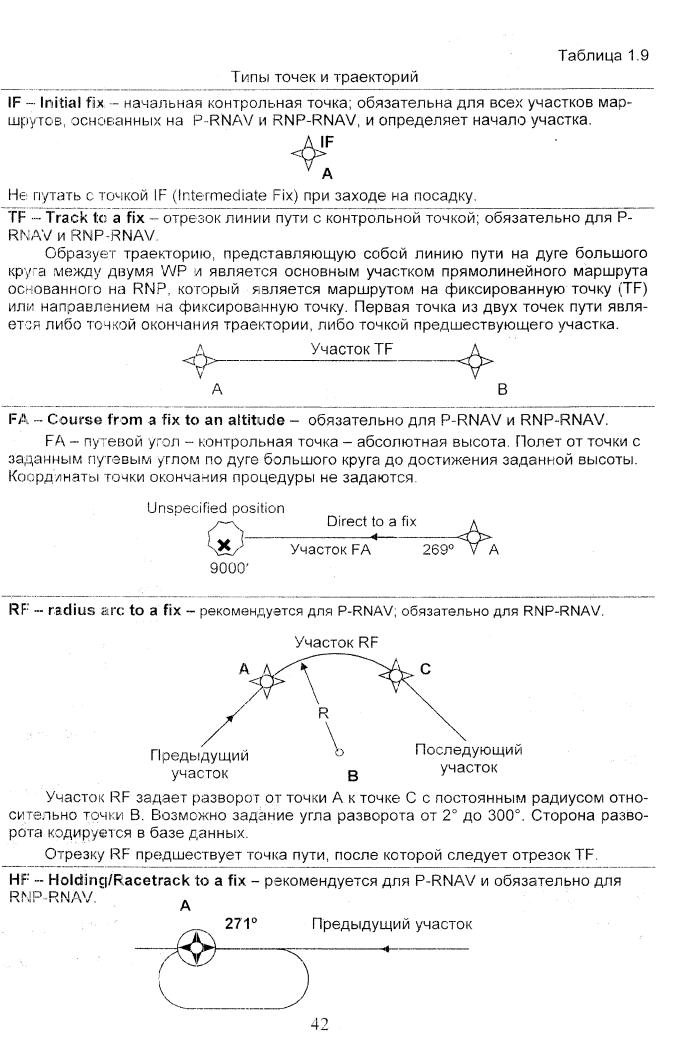

*) Пример применения данного типа траектории.
При полете между WP А и В диспетчер ОВД дал указание следовать на WPT
В. После активирования WP В пилот нажал клавишу GO-TO (DIRECT ТО). В мо-
мент нажатия клавиши бортовой компьютер вычислил параметры новой линии
заданного пути, которая и является дугой большого круга.
1.13.2. Особенности прохождения точек пути
Тип участка между двумя точками Fly-over всегда определяется типом окончания траектории TF.
При расчете схем вылета, захода на посадку и ухода на повторный заход на оснозе RNAV и RNP-RNAV WPs размещают таким образом, чтобы расстояние S между
ними было не меньше минимальной длины стабилизации L. В свою очередь L зави-
сит от типа последовательности точек Fly-over и Fly-by, значения крена и скорости полета (рис. 1.2).
Выход на новую ЛЗП после пролета точки Fly-over осуществляется под углом 30° к ЛЗП из расчета, чтобы к точке пути подойти с заданным путевым углом участка. Расстояние S (см. рис. 1.2) зависит от участка схемы захода на посадку или ухода на повторный заход и находится в пределах 0.8 - 1.4 км (для ВС кат. А - меньшее
значение, для кат. D - большее).
Разработчиками процедур P-RNAV и RNP RNAV рассчитываются траектории
полетов, представленные далее.
Точки пути типа Fly-over на схемах вылета, прибытия и захода на посадку устанавливаются только по необходимости для обеспечения безопасного пролета пре-
пятствий, по шумовым критериям или из-за сложной структуры воздушного про-
странства в районе аэродрома.
43

На схемах в районе аэродрома после прохождения точки Fly-over возможны только три типа участков - DF (Direct to fix), TF (Track to fix), CF (Course to fix). Ин-
формация об |
указателе окончания |
траекторий публикуется в АИП. Однако и по кар- |
|||
там Jeppesen |
можно определить |
указатель окончания траектории: если на |
участке |
||
схемы опубликован ЗПУ - это TF |
или CF, а если |
участок схемы |
обозначен |
точками |
|
пути без ЗПУ - это DF. |
|
|
|
|
|
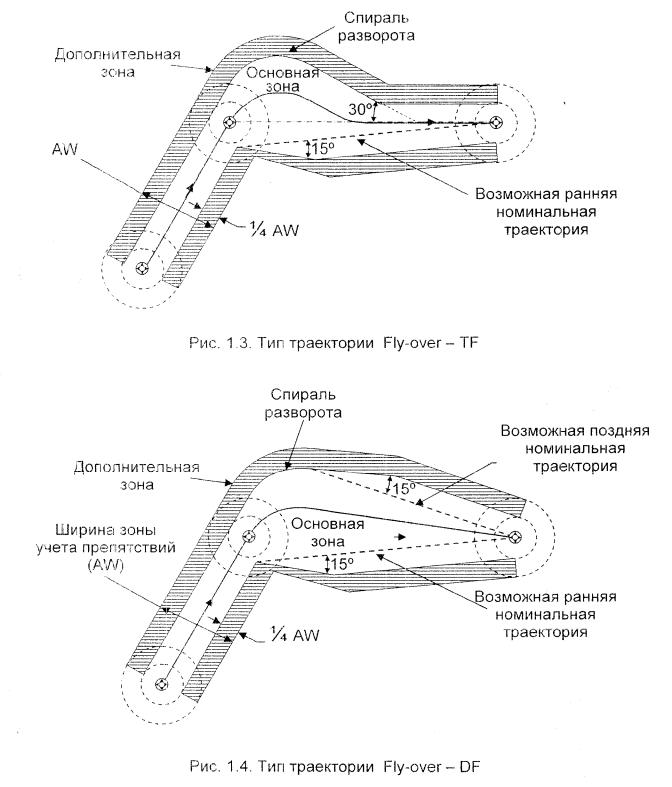
1. Траектория Fly-over - TF |
устанавливается в |
случае, когда |
после прохожде- |
||
ния Fly-over требуется выход на новую линию пути, при этом угол выхода не
менее 30°.
Защищенное воздушное пространство для учета препятствий рассчитывается
из предположения, что ВС будет выходить на осевую линию следующего участка с
углом выхода не менее 30° (см. рис. 1.3).
2. Траектория Fly-over |
- |
DF обычно устанавливается на схемах вылета, что по- |
||||
зволяет более плавно разворачиваться для полета на следующую точку пути. |
|
|||||
При этом |
выход на |
новую линию пути не обязателен, поскольку |
защищен- |
|||
ное воздушное |
пространство |
учета препятствий |
вокруг такой |
траектории |
расширено |
|
(рис. 1.4). |
|
|
|
|
|
|
3. Траектория Fly-over |
- |
CF устанавливается |
на схемах |
RNAV-ILS, когда в за- |
||
вершении процедуры RNAV после пролета точки Fly-over выполняется разворот для выхода в створ курсового маяка ILS с углом выхода 30°.
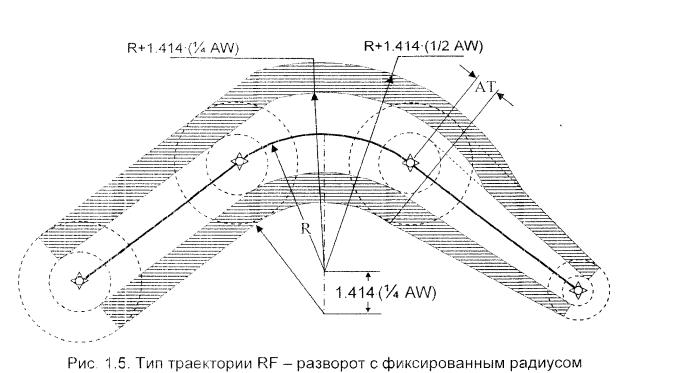
4. Тип участка RF - разворот с фиксированным радиусом.
Тип участка RF может устанавливаться в сложной структуре воздушного про-
странства и требует точного выдерживания траектории полета, особенно при боль-
ших углах разворота. А кроме того, использование данного типа участка позволяет уменьшить область учета препятствий по сравнению с использованием разворотов в
точках Fly-by и Fly-over. Данный тип участка устанавливается в схемах захода на по-
садку и схемах вылета, основанных на RNP-RNAV.
44
Назначение RF - переход с одного участка схемы на другой по предписанной
криволинейной траектории, поэтому RF рассматривается как отдельный участок
схемы, имеющий три точки пути: начальная RF, конечная RF и точка, от которой за-
дается радиус разворота. Эта точка называется "центр разворота" (рис. 1.5).
Защищенное воздушное пространство вокруг RF построено |
из условия, что |
ВС |
будет регулировать крен при развороте таким образом, чтобы с |
учетом влияния |
вет- |
ра выдерживать заданный радиус разворота. По этой причине невозможно опубли-
ковать заданный крен для RF, поскольку он зависит от сложившейся обстановки - скорости полета и воздействия ветра.
45
Предполагается также, что ВС начинает создавать крен для разворота еще до
прохождения точки начала RF. То же и в конце RF - вывод из крена начинается до
конечной точки RF. По сути, точки начала и конца RF являются точками Flyby.
1.14.Процедуры маневрирования
1.14.1.Зона ожидания
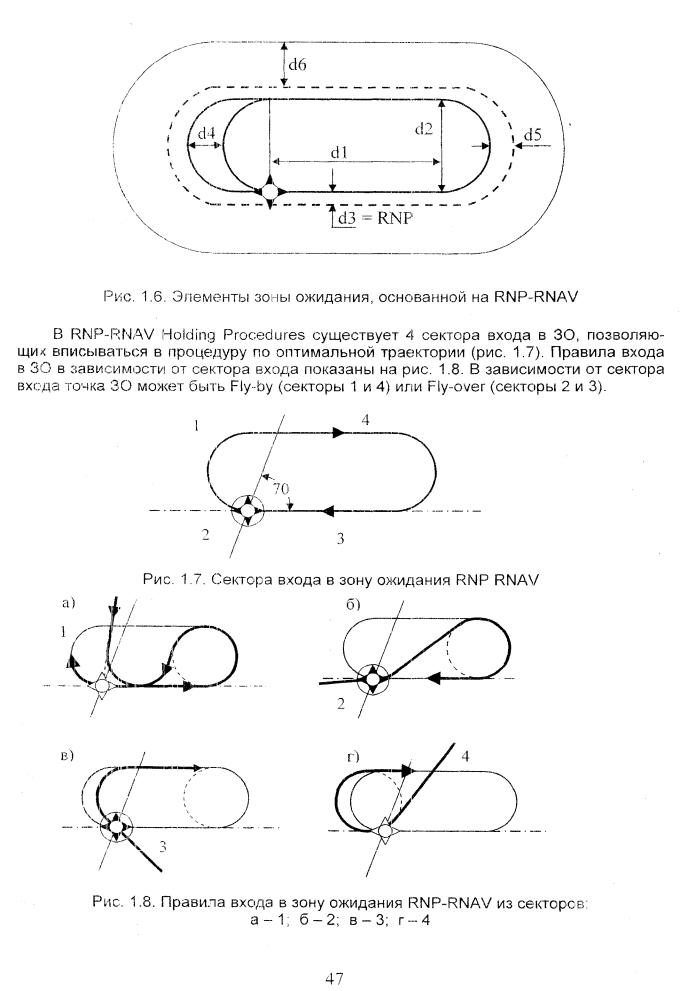
Зона ожидания (30), основанная на RNP-RNAV (рис. 1.6), определяется:
1)точкой пути ожидания, координаты которой выражены в системе WGS-84;
2)направлением разворота после прохождения Holding WPT (Fix);
3)минимальной и максимальной высотой полета с дискретностью 100 футов или 50 м;
4)максимальной приборной скоростью полета в зоне ожидания;
5) путевым углом линии пути приближения относительно истинного меридиана
сточностью до десятой доли градуса;
6)длиной (d1) линии пути приближения с точностью до десятой доли мили;
7)шириной зоны ожидания (d2), зависящей от радиуса разворота;
8)значением RNP (d3);
9) расстоянием d4, используемым |
при построении защитного предела |
при вхо- |
де с сектора 4, d4 = 0.35 • d2; |
|
|
10)увеличенным значением RNP при выполнении разворота: d5 = 1.4 • RPN; |
|
|
11)шириной буферной зоны (d6), |
которая определяется по большему |
числу из |
RNP + 3.7 км или 9.3 км. |
|
|
46

Процедура ожидания |
RNP-RNAV задается, кроме |
прочего, |
указателями |
оконча- |
ния траектории, которые определяют, когда будет отменен режим ожидания в FMS: |
|
|||
1) HF - 'holding to a |
fix' - вход, один полный круг |
и отмена |
ожидания над |
Holding |
Fix. Процедура применяется на схемах захода на посадку типа course reversal; |
|
|||
2)HM - 'holding to a manual termination' - вход на заданной высоте и с заданной скоростью, полет в режиме ожидания до принудительной отмены экипажем. Применяется в основном в конце процедуры missed approach;
3)НА - 'holding to an altitude' - вход и ожидание, как правило, со снижением, с
отменой режима после того, как будет достигнута заданная высота |
и самолет, за- |
вершив круг, пройдет над точкой Holding Fix. |
|
Выход из ожидания HF и НА будет производиться автоматически, при этом FMS |
|
будет обеспечивать траекторию полета Fly-by Holding Fix TF next WPT. |
|
Предполагается, что ВС, оборудованное системой RNP-RNAV, |
сможет оста- |
ваться с вероятностью 95% в пределах схемы 30. На рис. 1.6 данная область огра-
ничена пунктирной линией.
Точка пути, |
на которой основана ЗО, в зависимости от |
сектора |
входа |
может |
|||||
быть Fly-by или Fly-over. |
|
|
|
|
|
||||
Ширина |
30 |
определяется радиусом |
разворота с |
учетом следующих углов кре- |
|||||
на: для эшелонов полета менее FL245 - 23°, для больших эшелонов - 15°. |
|
|
|||||||
При |
полете |
в 30 управление ВС должно осуществляться в автоматическом ре- |
|||||||
жиме |
с |
учетом |
парирования влияния ветра на угол |
сноса на |
прямолинейных |
участ- |
|||
ках и изменением угла крена во время разворота. |
|
|
|
|
|||||
1.14.2. Процедуры вылета |
|
|
|
|
|
||||
Процедуры |
вылета с использованием |
RNAV, по |
сравнению |
с обычными, |
позво- |
||||
ляют: |
|
|
|
|
|
|
|
|
|
- создавать траектории полета с соблюдением принципа наведения на каждом |
|||||||||
отрезке с учетом высокой точности их выдерживания; |
|
|
|
|
|||||
- значительно снижать шумовое воздействие на |
критичные к шуму районы за |
||||||||
счет |
более |
точного выдерживания траекторий полета, установленных |
с учетом об- |
||||||
хода таких районов.
Данные процедуры вылета имеют следующие особенности построения:
1) |
в RNAV SID, как и в обычных SID, предполагается |
маневрирование |
с кренами |
15°, a RNP-RNAV SID-20е; |
|
|
|
2) |
точка первого разворота устанавливается на продолжении оси ВПП |
не ближе |
|
рубежа, на котором достигается высота 400 футов (120 |
м) относительно |
выходного |
|
торца ВПП (DER). Такая высота при нормированном градиенте набора 3,3% дости-
гается |
на |
удалении 1.9 м. миль за торцом DER. При большем градиенте набора |
|||
(PDG) эта точка приближается к DER; |
|
|
|
||
3) |
в траекториях полета не предусматриваются углы разворотов более 120°. В |
||||
процедурах RNP-RNAV развороты на углы более 90° могут задаваться заданным |
|||||
радиусом разворота, т.е. заданием типа участка терминатором RF; |
|
|
|||
4) |
для |
безопасного пролета препятствий применяются |
в основном |
ограничения |
|
по высоте |
(заданные условия набора) и только в крайних |
случаях с целью уменьше- |
|||
ния зоны учета препятствий могут устанавливаться ограничения по скорости полета; |
|
||||
5) |
участки полета с заданным курсом и участки векторения не устанавливаются, |
||||
поскольку |
их невозможно программировать (кодировать) в |
оборудовании |
RNAV. |
Од- |
|
нако |
это |
не препятствует использованию диспетчером векторения или |
полету |
на |
|
любую заданную диспетчером точку; |
|
|
|
||
6) процедуры RNAV SID заканчиваются в точке пути, используемой в структуре
маршрутов. Если такой точки не существует либо она расположена слишком далеко. RNAV SID содержит тактическую точку, в которой достигается безопасная высота
48
полета по маршруту, после чего дается предписание (например, DF, CF или TF) для
выхода на точку пути нужного маршрута.
Очень важным моментом при вылете является выполнение первого разворота. Рассмотрим четыре возможных маневра и защищаемое пространство вокруг уста-
новленных траекторий полета (рис. 1.9 - 1.12). На рис. 1.9 - 1.12 штриховкой пока-
заны дополнительный зоны учета препятствий, в которых запас высоты над препятствием (МОС) уменьшается от установленного значения до нуля.
Маневр conditional transition (рис. 1.12) предписывается, когда разворот осу-
ществляется |
по достижению |
заданной высоты. В этом случае невозможно |
устано- |
вить первую |
точку пути SID. |
Предполагается, что разворот может быть начат |
как при |
достижении определенной высоты не менее 120 м/400 фут и не ранее 600 м от начала ВПП, так и за DER. Такие маневры программируются (кодируются) в оборудо-
вании уровня FMS. При использовании автономных приемников GNSS класса А потребуется вмешательство членов летного экипажа в его работу, а именно, включение задачи ПРЯМО НА (DF) после выполнения первого разворота.
На рис. 1.13 представлена схема RNAV SID аэродрома Хельсинки. Выполнение
данного SID возможно при условии наличия на борту ВС оборудования P-RNAV, по-
лучающего информацию от двух маяков DME или GNSS. |
|
|
В |
базе данных опубликованные SID должны иметь кодификаторы, |
которые да- |
ны в |
квадратных скобках. В описании SID указана структура участков |
для каждого |
SID. |
|
|
1.14.3. Процедуры прибытия и захода на посадку
1.14.3.1. Общие положения Внедрение процедур прибытия и захода на посадку с использованием метода
зональной навигации позволит принести |
выгоды как ОВД, так и авиакомпаниям. Од- |
||
нако |
эти процедуры в настоящее время обладают одним недостатком - они умень- |
||
шают |
гибкость |
использования воздушного пространства и свободу действий диспет- |
|
черов |
ОВД в |
воздушном пространстве |
с интенсивным воздушным движением. По- |
этому диспетчеры в часы пик с целью увеличения пропускной способности часто
предпочитают векторить все ВС, независимо от наличия процедур RNAV и навига-
ционных возможностей прибывающих ВС. Им не хватает времени и навыков регулировать "смешанное" воздушное движение, когда одно ВС выполняет схему P-RNAV и летит по заданной траектории, а другое ВС, не имеющее допуска к P-RNAV, должно заводиться на посадку векторением. Именно по этой причине в ряде аэропортов За-
падной Европы ожидается |
введение ограничений на "смешанное" воздушное движе- |
ние. Это означает, что в |
таких аэропортах разрешение на P-RNAV может быть обя- |
зательным в определенные дни и часы его работы, и именно в эти дни и часы процедуры P-RNAV и RNP-RNAV будут применяться в полную силу.
Преимущества процедур прибытия и захода |
на посадку с использованием ме- |
тода зональной навигации заключаются в следующем: |
|
- при снижении по оптимальным траекториям возможен полет с задросселиро-
ванными двигателями вплоть до входа в глиссаду;
-при снижении с задросселированными двигателями уменьшается шумовое и
эмиссионное воздействие на окружающую среду;
-снижается нагрузка на пилотов и диспетчеров, особенно по ведению связи.
49