

RNAV-Вовк В.И., Липин А.В., Сарайский Ю.Н
.pdf–величину удерживания, нормирующую отклонения ВС от ЛЗП (95% времени
полета в пределах этой величины);
–предел удерживания (удвоенная величина удерживания);
–целостность удерживания, ограничивающую вероятность необнаруженного системой уклонения за предел удерживания (не более 10 -5);
– непрерывность удерживания, ограничивающую вероятность выдачи сообщения (правильного или ложного) об уклонении за предел удерживания или функ-
ционального отказа системы (не более 10 -4).
Для вертикальной навигации (VNAV) документом [19] впервые вводятся характеристики требуемой точности. Они касаются только этапов горизонтального полета
и снижения. Траектории набора высоты в документе пока не рассматриваются, поскольку они слишком различаются для разных типов ВС.
Устанавливается предел отклонения по вертикали VPPL (Vertical Path Performance Limit). Его значение составляет от 150 до 260 футов и зависит от диапа-
зона высот, в котором |
выполняется полет (чем больше высота, тем больше VPPL), и |
от того, выполняется |
горизонтальный полет или снижение. VPPL в некотором смыс- |
ле аналогичен величине удерживания, применяемой для боковой координаты. Но
применительно к вертикальной плоскости этот предел не должен быть нарушен на протяжении не менее 99,7% времени полета. Это значение говорит о том, что при нормальном распределении погрешностей VPPL равен утроенной средней квадра-
тическjй погрешности выдерживания высоты.
Требования целостности и непрерывности удерживания для VNAV не устанавливаются, но вероятность невыявленной системой потери навигационной способности VNAV должна быть не менее 10 -3.
Нормируются в RNP RNAV и погрешности продольной навигации (по времени). Погрешность расчета времени пролета пункта не должна превышать 1% оставшегося времени полета до него. Если же система имеет функцию управления временем прилета в пункт (ТОАС - Time of Arrival Control), то в 95% случаев погрешность не должна превышать 30 с.
Вышеизложенные требования |
к навигационным |
системам, |
содержащиеся |
в |
[19 |
|||
], сражают точку зрения мирового сообщества в |
лице RTCA |
на |
проблему |
обеспече- |
||||
ния точности навигации в условиях RNP RNAV. |
|
|
|
|
|
|
|
|
1.9.2. Характеристика требований RNP RNAV |
|
|
|
|
|
|
|
|
Разумеется, работа по развитию концепции |
RNP RNAV |
ведется |
не |
только |
||||
RTCA, но и ИКАО. Одна группа |
экспертов ИКАО |
по |
пролету препятствий (ОСР) |
раз- |
||||
рабатывает критерии для процедур RNP RNAV, а другая группа по вопросам эшелонирования (RGCSP) - критерии по эшелонированию полетов RNP RNAV [4]. По результатам работы этих групп разработаны критерии построения схем захода на посадку для RNP0.3 и интервалы эшелонирования на маршрутах с RNP4.
Для обеспечения точных заходов и посадок с использованием RNAV точность
навигации в вертикальном плане тоже должна быть включена в RNP. В результате спектр типов R.NP для захода на посадку стал занимать диапазон от RNP1 до RNP 0.003/Z, где число Z. выражает требование к точности вертикального наведения, выраженное в футах.
Планируемые типы RNP для захода на посадку представлены в табл. 1.3.
Сертификацию по RNP1 имеют навигационные системы (FMS), которые зару-
бежная промышленность начала производить с 1990 г.
30
Воздушные суда выпуска 1998 |
г. и позднее могут |
претендовать |
на сертифика- |
|||
цию по RNP0.03/125 и даже ниже. Однако пока отсутствуют процедуры такой серти- |
||||||
фикации. |
|
|
|
|
|
|
Первые публикации |
процедур RNP RNAV в |
Европе |
ожидаются не |
ранее 2005 г., |
||
а обязательной такая навигация станет с 2010 г. |
|
|
|
|||
RNP задаются требованиями четырех основных параметров: |
|
|||||
1) |
точность RNAV; |
|
|
|
|
|
2) |
обеспечение |
целостности |
навигации |
при |
использовании |
оборудования |
RNAV; |
|
|
|
|
|
|
3)готовность оборудования RNAV для навигации;
4)непрерывность навигации при использовании оборудования RNAV.
Таблица 1.3
Планируемые типы RNP для захода на посадку
Тип |
Требуемая |
|
|
RNP |
точность(95% |
Описание |
|
|
вероятность), |
||
|
|
||
|
м. миля/фут |
|
|
0.003/z |
± 0.003/ z |
Для заходов на посадку, посадок, торможения, руления по |
|
CAT III: ILS, MLS и GNSS/GBAS |
|||
|
|
||
0.01/15 |
± 0.01/15 |
Для заходов на посадку по CAT II с ВПР до 30 м: |
|
ILS. MLS и GNSS/GBAS |
|||
|
|
||
0.02/40 |
± 0.02/40 |
Для заходов на посадку по CAT I с ВПР до 60 м: |
|
ILS, MLS и GNSS/GBAS или SBAS |
|||
|
|
||
0.03/50 |
± 0.03/50 |
Для заходов на посадку RNAV/VNAV с поддержкой SBAS |
|
0.3/125 |
± 0.3/125 |
Для заходов на посадку RNAV/VNAV с поддержкой SBAS |
|
или Baro-VNAV |
|||
|
|
||
0.3 |
± 0.3 |
Начальный и промежуточный участки захода, вылеты |
|
|
|
Начальный и промежуточный участки захода, вылеты. |
|
0.5 |
± 0.5 |
Применяет в тех случаях, когда RNP0.3 не может быть |
|
обеспечен из-за недостаточной инфраструктуры, a RNP1 |
|||
|
|
||
|
|
не достаточно из-за высоких препятствий |
|
1 |
± 1.0 |
STAR, начальный и промежуточный участки захода на по- |
|
садку, вылеты |
|||
|
|
Кроме точности любой тип RNP включает критерии целостности, готовности и непрерывности обслуживания. Эти критерии имеют математические описания и вы-
ражаются численным значением. Численные значения критериев разные для мар-
шрутов и районов аэродромов (ТМА), а что касается заходов на посадку, то учитывается еще и тип захода на посадку.
При сертификации систем применяются чисто математические способы оценки всех составляющих RNP, которые не учитывают возможные ограничения на исполь-
зование навигационных систем - датчиков. Поэтому на эксплуатанта возлагается
обязанность самостоятельно оценивать целостность, готовность и непрерывность
обслуживания перед выполнением полета, учитывая текущую |
информацию |
о со- |
|||
стоянии |
навигационных |
систем (NOTAM по |
радиосредствам, |
специальные |
извеще- |
ния о состоянии GPS) и применяемых специальных средств прогнозирования. На- |
|||||
пример, |
для оценки готовности системы GPS, как датчика оборудования RNAV, ус- |
||||
тановлена процедура |
RAIM-прогнозирования, |
позволяющая |
определить |
возмож- |
|
31
ность использования системы GPS в заданном месте в заданное время. Примеры
такой оценки приведены далее.
Самым “готовым" и "непрерывным" датчиком RNAV является инерциальный датчик, который готов и непрерывно работает всегда, если его включить и корректно
выставить. Но у этого типа датчиков существуют |
проблемы с другими составляющи- |
ми RNP - точность работы и целостность, особенно при длительных полетах. |
|
Проблем с точностью у датчика GPS нет, но |
есть проблемы с готовностью и не- |
прерывностью обслуживания. По этой причине для полетов по приборам с использованием GPS обязательно надо иметь как минимум RAIM (лучше FDE), а для заходов на посадку в сложных метеоусловиях - системы функционального дополнения
WAAS/LAAS, которые кроме повышения точности, |
доводят |
характеристики |
готовно- |
||||||||
сти и непрерывности обслуживания до установленных |
соответствующим |
RNP |
зна- |
||||||||
чений. |
|
|
|
|
|
|
|
|
|
|
|
|
Основные особенности B-RNAV и P-RNAV заключаются в том, что, кроме пока- |
||||||||||
зателя точности в 5 и 1 м. Милю, из всего |
набора |
характеристик RNP |
оговариваются |
||||||||
как |
обязательные |
только некоторые из них. |
Основных цифры целостности, |
готовно- |
|||||||
сти и непрерывности, обязательных для |
RNP-RNAV, достигать не требуется, по- |
||||||||||
скольку безопасность применения зональной навигации B-RNAV и P-RNAV обеспе- |
|||||||||||
чивается развитой |
инфраструктурой ОВД |
и |
возможностью |
экипажа |
использовать |
||||||
обычные навигационные средства при отказе системы RNAV. Что касается безопас- |
|||||||||||
ности заходов на посадку в режиме RNAV, |
например по GPS, то, как дополнитель- |
||||||||||
ная мера безопасности, применяется требование иметь |
запасной аэродром с |
обыч- |
|||||||||
ными средствами захода - ILS, VOR, DME. |
|
|
|
|
|
|
|
|
|
||
|
Особенностью RNP-RNAV является то, |
что необходимо |
соблюдать |
все |
требо- |
||||||
вания установленного типа RNP не только |
по |
точности, |
но и |
по целостности, |
готов- |
||||||
ности и непрерывности обслуживания. |
|
|
|
|
|
|
|
|
|
||
|
Основная цель введения RNP - обеспечение ОВД в каком либо районе |
воздуш- |
|||||||||
ного |
пространства. |
RNP устанавливаются |
государствами |
в |
зависимости |
от |
интен- |
||||
сивности воздушного движения, сложности маршрутов полетов и с учетом всей инфраструктуры CNS.
В районах и на маршрутах RNP органы ОВД обязаны следить за точностью навигации и, при необходимости, корректировать траекторию полета ВС. Поэтому невозможно вводить строгие RNP в районах, где не обеспечено адекватное наблюдение за воздушной обстановкой и качественная связь с воздушным судном.
Развитие систем связи, наблюдения, средств стратегического и оперативного планирования полетов должно опережать темпы введения строгих RNP, что прослеживается в Европе. В этой связи эксплуатанты должны направлять усилия не только
на повышение точности навигации, но и на модернизацию всего комплекса оборудо-
вания ВС для того, чтобы вписаться в опережающее развитие систем связи и на-
блюдения. Эксплуатант не получит разрешение |
на полеты в |
районах |
будущих RNP, |
не имея требуемых в этих районах систем связи и наблюдения. |
|
|
|
Для производства полетов в условиях RNP |
в п. 6.1.18 |
документа |
[1] говорится, |
что используемое навигационное оборудование |
выбирается |
эксплуатантом. Основ- |
|
ное условие заключается в том, чтобы это оборудование обеспечивало уровень точ-
ности выдерживания навигационных характеристик, установленный для каждого
конкретного типа RNP. При этом необходимо учитывать следующие аспекты:
1) эксплуатанты должны получить соответствующее разрешение от своих государств;
2) до получения разрешения эксплуатант должен представить государственно-
му органу ГА подтверждение того, что данный тип оборудования соответствует уста-
новленным требованиям;
32
3) эксплуатант |
вносит в |
эксплуатационную документацию |
(РЛЭ ВС, РТО, РПП, |
|
РК и т.д.) ограничения и условия, навигационные процедуры |
для штатных и нештат- |
|||
ных ситуаций, прописывает |
правила обновления баз данных, технического обслужи- |
|||
вания, утверждает программы и проводит подготовку летного |
и технического |
персо- |
||
нала; |
|
|
|
|
4) государствам |
следует |
установить соответствующие |
административные |
про- |
цедуры с тем, чтобы исключить перегруженность своих служб выдачи разрешений и свести к минимуму расходы эксплуатантов.
1.10.Эксплуатационные характеристики GNSS, как одного из основных датчиков RNP-RNAV
Точность, Требования к характеристикам |
GNSS |
определены |
с учетом |
различ- |
|||
ных типов |
RNP, в том числе для выполнения |
двух типов захода на |
посадку |
и посадки |
|||
с наведением по вертикали: RNP 0.3/125 (AVP-I) и RNP 0.03/50 (AVP-II). |
|
|
|
||||
Очень |
важной эксплуатационной характеристикой |
GNSS, |
как |
основного |
датчика |
||
RNP-RNAV, является точность. В данном контексте точность характеризуется по- |
|||||||
грешностью |
определения местоположения с |
помощью |
GNSS. |
Для |
целей |
аэронави- |
|
гации принято указывать величину погрешности, соответствующую 95-процентной вероятности, то есть равную удвоенной средней квадратической погрешности (две «сигмы»).
Собственная точность космического сегмента систем GPS и ГЛОНАСС меняет-
ся во времени. Орбитальное движение спутников, возмущения атмосферы и многие другие факторы приводят к появлению ошибок определения местоположения, значения которых могут меняться на интервале в несколько часов. Поэтому точность
навигационных источников GPS и ГЛОНАСС |
определяется как две «сигмы» для каж- |
||||||||||||
дого конкретного измерения, а не на заданном интервале времени измерений. |
|
|
|
||||||||||
|
Величина критерия снижения точности местоположения (PDOP) зависит от |
||||||||||||
геометрического фактора, т.е. углов пересечений |
линий положений. |
Как |
правило, |
||||||||||
PDOP колеблется от 0.8 до 10. Считается, |
что при PDOP≤6 обеспечивается высо- |
||||||||||||
кая точность определения позиции ВС. Используя |
сведения из |
альманаха, |
компью- |
||||||||||
тер в аппаратуре потребителя непрерывно |
вычисляет |
критерий PDOP, определяя |
|||||||||||
лучшую четверку из всех видимых спутников |
для |
определения |
местоположения. В |
||||||||||
табл. 1.4 приведены точности навигационных источников GPS и ГЛОНАСС при их |
|||||||||||||
использовании без функциональных дополнений WAAS/LAAS [20]. |
|
|
Таблица 1.4 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Точность навигационных источников GPS и ГЛОНАСС, 2 σ (Р = 95%) |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Параметры |
|
|
|
|
GPS |
|
ГЛОНАСС |
||||
|
Точность определения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
1) |
местоположения в плане, м: |
|
|
|
|
≤ 13 |
|
|
|
|
|
|
|
|
– стандартное обслуживание при PDOP < 6 |
|
|
|
|
|
28 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
– канала "стандартная точность" |
|
|
|
|
≤77 |
|
|
|
|
||
|
2) |
по вертикали, м: |
|
|
|
|
|
|
|
|
|
|
|
|
|
– стандартное обслуживание при PDOP < 6 |
|
|
|
|
|
|
60 |
|
|
||
|
|
– канала "стандартная точность" |
|
|
|
|
|
|
|
|
|
||
|
3) скорости, м/с |
|
|
|
|
|
0,2 |
|
|
0,15 |
|
||
|
Из |
табл. 1.4 видно, что |
точности GPS и |
ГЛОНАСС для навигации на маршруте и |
|||||||||
в районе аэродрома вполне |
достаточно. Но |
ее |
явно не |
хватает |
для |
точных |
заходов |
||||||
на посадку. Использование системы функционального дополнения WAAS/LAAS позволит довести точность до требуемых значений.
33

|
Целостность. Очень важным при использовании GNSS является своевремен- |
||||
ное |
получение информации, |
когда |
система не должна использоваться для навига- |
||
ции. |
Собственно |
GNSS не |
выдает |
сигналов о том, насколько |
достоверна информа- |
ция |
со спутника, |
по которой |
определяются координаты ВС. Эта |
забота возложена на |
|
потребителя. Наличие функции бортового оборудования RAIM и более совершенной FDE позволяет обеспечить такой контроль. Кроме этого, системы функционального
дополнения WAAS/LAAS будут выдавать необходимый сигнал потребителям.
Готовность. В связи с тем, что во время полета возможны перерывы в приеме сигналов GPS готовность системы не может быть 100%. Правительство США гаран-
тирует, что готовность системы GPS к использованию в любой точке земного пространства соответствует вероятности 0,95. Это приемлемо для полета по маршруту,
но недопустимо мало для захода на посадку. Повысить готовность возможно с помощью комплексирования бортовых навигационных систем и/или развертыванием систем функциональных дополнений WAAS/LAAS.
Непрерывность обслуживания - вероятность того, что обслуживание, предоставляемое навигационной системой, будет обеспечиваться в течение некоего этапа полета при условии, что оно обеспечивалось в его начале.
В зависимости от типа захода принимаются следующие показатели:
Вид захода на посадку |
Целостность |
Непрерывность |
Неточный |
1 – 10 -5(за час) |
1 – 10 -4 (за час) |
Точный |
1- 3.5 10 -7 (на операцию) |
1 - 8x10 -6 (в любые 15 с) |
Пример, Выражение 1 – 10 -5 в обычной записи соответствует:
т.е. в течение одного часа с вероятностью |
0.99999 навигационная система |
||||
должна быть способной выдавать пользователю |
своевременное |
предупреждение, |
|||
когда ее нельзя использовать для целей навигации. |
|
|
|
|
|
Непрерывность |
в обслуживании применительно |
к |
использованию |
GNSS состо- |
|
ит из готовности |
космического сегмента и готовности |
бортового |
оборудования. В |
||
связи с тем. что для GPS они невысоки (не выше 0,95), путь повышения готовности |
|||||
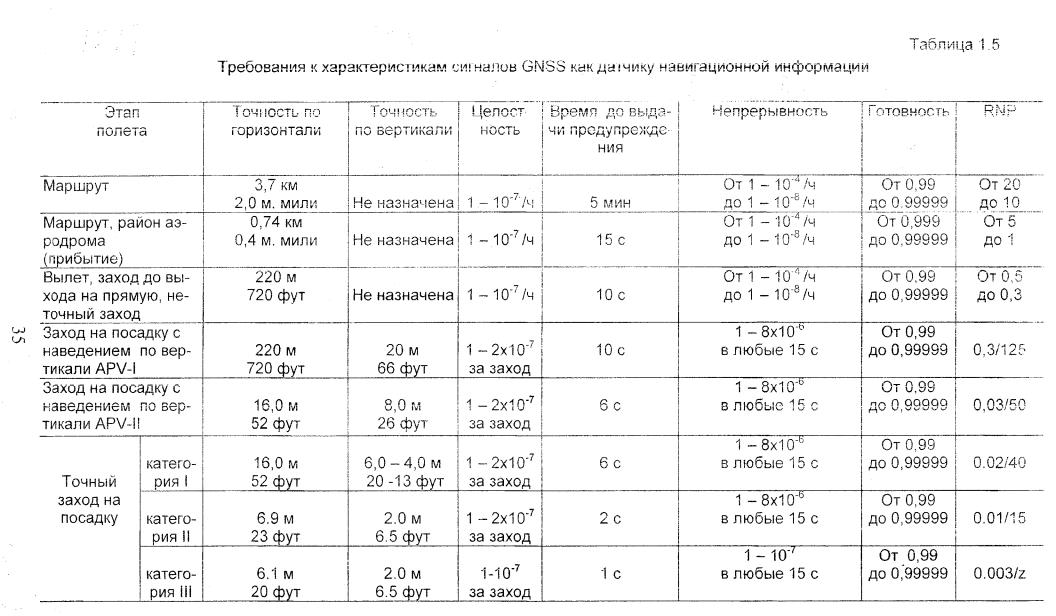
использования - мультисенсорные системы и/или WAAS/LAAS. В табл. 1.5 сведены |
|||||
требования к точности, целостности, готовности |
и |
непрерывности |
обслуживания |
||
GNSS, которые должны быть достигнуты при ее использовании в качестве датчика
оборудования RNAV для различных типов RNP.
1.11. Три статуса бортовых навигационных систем
Существует три уровня требований к бортовым навигационным системам в зависимости от того, в каком статусе они используются: самодостаточной, основной
или дополнительной навигационной системы.
Самодостаточнае навигационная система – система, разрешенная для дан-
ной процедуры или для данного этапа полета, которая в течение всего времени выполнения процедуры или данного этапа полета удовлетворяет всем четырем требованиям к навигационным характеристикам RNP: точности, целостности, эксплуатационной готовности и непрерывности обслуживания.
34
Примечание. Это определение не исключает наличия на борту других навигационных систем. Система, являющаяся самодостаточным навигационным средством, может иметь один датчик или несколько навигационных датчиков (мультисенсорная система).
|
Основная навигационная система - |
система, одобренная для данного полета |
||
или |
его |
этапа, которая |
удовлетворяет требованиям точности и целостности, но мо- |
|
жет |
не |
удовлетворять требованиям по эксплуатационной готовности и непре- |
||
рывности |
обслуживания, |
Безопасность ее |
применения достигается за счет разреше- |
|
ния полетов только в определенные периоды времени и при соответствующих процедурных ограничениях.
Примечание. Безопасность использования основной навигационной системы обеспечивается не только процедурными ограничениями, но, очень часто, также и требованием иметь дополнительные навигационные системы, которые включаются и используются при отказе основной. Например, требования B-RNAV: приемо-индикатор СНС + приемник VOR/DME.
Дополнительная навигационная система - система, которая должна исполь-
зоваться в сочетании с системой, являющейся самодостаточным навигационным средством. Для получения одобрения для ее применения на данном этапе полета
требуется, чтобы на борту ВС была другая система, являющаяся для рассматриваемого этапа самодостаточным навигационным средством. Дополнительная нави-
гационная система должна удовлетворять требованиям точности и целостности во время выполнения данной процедуры или на данном этапе полета, а вопросы эксплуатационной готовности и непрерывности обслуживания при этом не рассматриваются.
Примечание. Система, утвержденная как дополнительное навигационное
средство с одним датчиком или мультисенсорная, во время выполнения полета при удовлетворении требований точности и целостности может быть исполь-
зована без всякой перекрестной проверки (сравнения) |
с |
самодостаточным сред- |
|||||
ством. Мало того, |
самодостаточная система может включаться и использо- |
||||||
ваться |
тогда, |
когда |
дополнительная система значительно снизила точность |
||||
работы или имеет! признаки отказа. |
|
|
|
|
|||
Самодостаточными |
системами могут считаться только мультисенсорные FMS, |
||||||
которые могут удовлетворять всем четырем критериям |
RNP. Правда, пока не для |
||||||
всех типов RNP и не на всех этапах полета. В будущей RNP-RNAV используемые |
|||||||
навигационные системы должны быть самодостаточными. |
|
|
|
||||
При выполнении полетов в системе B-RNAV к наиболее распространенной ос- |
|||||||
новной |
системе |
можно |
отнести приемоиндикатор |
(ПИ) СНС, |
отвечающий |
требовани- |
|
ям ТСО С129. |
|
|
|
|
|
|
|
Важным моментом |
использования основных |
систем |
является то, что |
такие по- |
|||
нятия, как "комплексное самолетовождение", с позиции точности навигации здесь не
применяются. Поскольку |
применение |
дублирующих |
систем, |
таких |
как, например |
НВУ-БЗ, ДИСС-013-134, VOR или АРК, |
не будут соответствовать предписанной точ- |
||||
ности навигации в районе |
действия RNAV. При этом |
в случае |
отказа |
основной сис- |
|
темы выполняются "аварийные процедуры при отказе навигационной системы" и
производятся соответствующие доклады диспетчеру ОВД.
В отношении дополнительных систем |
можно сказать, что для России очень не- |
|||
привычен подход ИКАО к такому статусу |
навигационной системы для |
осуществления |
||
навигации. При полетах в воздушном пространстве России (до введения |
RNAV) |
ПИ |
||
СНС используется только как дополнительная навигационная система, |
а |
не как |
ос- |
|
|
36 |
|
|
|
новная. В этой связи, если, например, не будет использовано штатное навигационное вычислительное устройство типа НВУ – БЗ или ДИСС-013-134, то это будет вос-
принято, как не комплексное использование средств навигации. Но при этом необхо-
димо отметить, что системы типа НВУ – БЗ или ДИСС-013-134 при осуществлении навигации с применением RNP не могут быть отнесены к самодостаточным навига-
ционным системам по той причине, что они не удовлетворяют всем четырем требо-
ваниям |
к |
навигационным характеристикам: точности, целостности, |
эксплуатацион- |
|
ной готовности и непрерывности обслуживания. |
|
|||
1.12. Точки пути и фиксированные точки в системе RNAV |
|
|||
ИКАО |
в Приложении 11 |
[11] и в Doc 8168 [12] определяет |
термин Waypoint |
|
(WPT, |
WP, |
W/P) как термин, |
применяемый для описания маршрутов |
и процедур зо- |
нальной навигации. В Приложении 11 определен также термин 'significant point', ис-
пользуемый |
для |
описания географического положения пункта, используемого в |
||
структуре маршрутов и заданных траекториях полета. Поэтому любой WPT является |
||||
одновременно и 'significant point'. |
|
|||
Во множестве других документах ИКАО, FAA, JAA, Евроконтроля и АИПах госу- |
||||
дарств WPT описывается как фиксированная точка |
- FIX, особенно в описании про- |
|||
цедур |
захода |
на |
посадку, где в основном используются термины initial approach fix |
|
(IAF), |
intermediate |
fix (IF), final approach fix (FAF) |
missed approach point (MAPt) и |
|
missed |
approach |
holding fix (MAHF). Для избежания |
путаницы экспертами ИКАО при- |
|
нято решение продолжать использование терминов IAF, IF, FAF, MAPt и MAHF как в обычной, так и в зональной навигации.
Такое решение принято в ноябре 2002 г. на 13 совещании экспертов ИКАО по пролету препятствий. В этой связи в документах по зональной навигации могут встретиться следующие аббревиатуры точек пути процедуры захода на посадку:
IAWP |
- точка начала захода на посадку (IAF); |
IWP |
- точка пути промежуточного этапа захода на посадку (IF); |
FAWP - точка пути конечного этапа захода на посадку (FAF);
MAWP - точка ухода на второй круг (MAPt);
MHWP - конечная точка после ухода на второй круг с зоной ожидания (MAHF).
В аэропортах Европы все WPT в районе аэродрома подразделяются на страте-
гические - 'strategic waypoint' и тактические - 'tactical waypoint'.
Strategic waypoint - либо это очень важные для ОВД пункты, которые должны легко запоминаться и ясно отображаться на любом типе дисплея, либо это "активи-
рующие'' пункты, при прохождении которых бортовые системы безречевой связи ге-
нерируют сообщения органу ОВД об их прохождении. Такие пункты обычно являются частью процедур SID/STAR.
Tactical waypoint - пункты конкретной процедуры захода на посадку, а также промежуточные пункты процедур SID/STAR, которые не являются стратегическими и
служат для стыковки участков процедуры, для тактических нужд диспетчера ОВД при
организации движения в ТМА и т.д.
WPT устанавливаются во всех важных точках процедуры - при изменении за-
данного путевого угла (ЗПУ), высоты, скорости. Однако для описания условий вы-
полнения элемента процедуры (например, "разворот после пересечения высоты
1200 футов") WPT, как правило, не устанавливается, а в описании процедуры при-
меняется символ "1200'+".
Все географические координаты точек пути должны публиковаться в WGS-84.
Конечная ответственность за их точность и целостность возлагается на государства.
37
WPT определяются с точностью не менее:
-для торцов ВПП и MAPt - 0.01' (30 см);
-для всех других WPT |
- 0.1' (3 м). |
В России на конец 2003 г. переход на WGS-84 не осуществлен. |
|
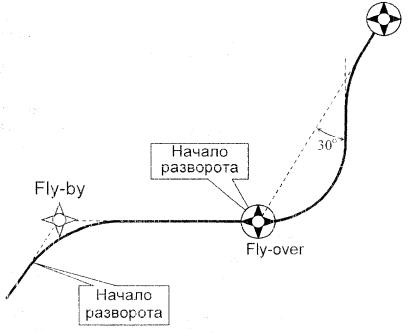
По правилам прохождения WP подразделяются на два типа: Fly-by и Fly-over
(см. рис. 1.1).
Развороты в WP выполняются при полете по маршруту с креном 20°. При разработке схем захода на посадку и вылета в соответствии с [12] предусматриваются следующие крены:
- 25° при заходе на посадку;
- при выполнении процедуры вылета и ухода на второй круг (Missed Approach) на схемах, основанных на RNAV - 15°, а на RNP RNAV - 20°.
При разработке схем маневрирования предполагается, что время достижения заданного крена будет осуществлено в течение 6 с (3 с - реакция пилота и 3 с - вре-
мя установления крена).
Рис. 1.1. Разворот в точке Fly-by и Fly-over
Кроме того, для схем, основанных на RNP RNAV, в точках пути Fly-by и Fly-over
возможно предписание на выполнение контролируемого разворота - разворота в поле ветра с постоянным радиусом, а не с учетом спирали разворота. Спираль раз-
ворота образуется при развороте ВС под влиянием ветра, т.к. во время разворота
радиус разворота относительно земли не является постоянной величиной.
В некоторых случаях, |
исходя из конкретной структуры воздушного пространства |
и наличия препятствий в |
районе аэродрома, разработчики схем маневрирования мо- |
гут использовать и иные значения кренов. В этой связи необходимо обращать вни-
мание на предписанные значения кренов, опубликованные на картах (схемах).
Необходимо отметить, что после пролета WP типа Fly-over очень часто предусматривается выход на линию пути под углом 30°. При этом линией пути является
участок, соединяющий точку WP Fly-over и последующую точку пути (см. рис. 1.1).
38

Кодификаторы точек пути для одного и того же местоположения должны быть
одинаковыми - на картах в АИП, в сборниках АНИ, бортовых базах данных |
систем |
|||||||
RNAV и на дисплее у диспетчера. |
|
|
|
|
|
|
||
При осуществлении зональной навигации с типом RNP1: |
|
|
|
|||||
- WPT извлекается из базы данных и определяется по ее названию (если точка |
||||||||
имеет кодификатор) или по ее географическим координатам; |
|
|
|
|
||||
- разрешение и точность хранения координат WPT соответствует RNP; |
|
|
||||||
- в |
план |
полета |
может |
включаться |
не |
менее |
10-ти |
WPTs. |
Для RNP4, 10, 12,6 и 20:
-достаточно иметь азимут и дальность (А/Д) от другой WPT или использовать другие средства для ее определения (широта/долгота, А/Д от наземного маяка и
т.д.);
-разрешение и точность координат WPT совместима с RNP;
-в план полета может включаться не менее 4 WPTs как из базы данных, так и записанных вручную.
Для кодификаторов |
точек пути применяется стандартная система наименова- |
ний WPT - 5 Letter Name Code (5LNC). |
|
Пример: |
|
ВЕВЕТ. ASUGA |
- стратегические WPT в ТМА и на маршруте; |
НК601, НК642 |
- тактические WPT процедур RNAV в ТМА (IAP, SID, STAR). |
Координаты точек пути в ТМА какого-либо аэродрома публикуются в соответствующих разделах АИП в виде таблиц в алфавитном порядке. В табл. 1.6 в качестве
примера приведены данные из АИП Финляндии для аэропорта Хельсинки.
Таблица 1.6
Пример списка точек пути
WAYPOINTS FOR RNAV PROCEDURES
ВЕВЕТ |
60 14 18.92N 024 46 37.17E |
ESUGA |
60 14 22.25N 024 44 34.96E |
НК601 |
60 14 49.79N 025 03 10.19E |
………. |
………………………………. |
НК642 |
60 14 48.08N 024 37 21.43E |
VEPES |
60 27 24.00N 024 34 50.00E |
Внастоящее время точки пути, совмещенные с наземными маяками
VOR/DME/NDB, |
именуются в |
соответствии с позывными данного маяка. Как |
правило, |
это две - три |
буквы, которые |
и индицируются на дисплеях в кабине летного |
экипажа |
и диспетчера ОВД. Это не соответствует стандартной системе и со временем такие
точки будут переименованы согласно 5LNC.
Оборудование RNAV может создавать собственные точки, которые будут видны
на дисплее, но которых нет в АИПах, на картах фирмы Jeppesen и на дисплеях дис-
петчеров ОВД. Эти точки называются 'computer navigation-fixes'. Они создаются при активации из базы данных "наложенных" процедур SID, STAR и GPS-OVERLAY Approach. Система их наименования всегда описывается в Руководстве пользователя оборудования RNAV. Следующий пример такой системы наименований точек в оборудовании Trimble 2000 Approach Plus:
RW25L - торец ВПП 25L;
MA25L -- точка ухода на второй круг, как правило за 0,5 NM от RW25L;
D160F - точка на радиале 160° и удалении 6 м. миль от маяка VOR/DME;
39