

Измерит.техника
.pdf11
ную систему механизма. В зазоре между полюсными наконечниками и сердечником создается сильное равномерное радиальное магнитное поле, в котором находится подвижная прямоугольная катушка 4, намотанная медным или алюминиевым проводом на алюминиевом каркасе. Катушка (рамка) 4 может поворачиваться в зазоре на полуосях 5 и 6. Спиральные пружины 7 и 8 создают противодействующий момент и используются для подачи измеряемого тока от выходных зажимов прибора в рамку (механические и электрические соединения на рис. 2 не показаны). Рамка жестко соединена со стрелкой 9. Для балансировки подвижной части имеются передвижные грузики 10.
Запас электромагнитной энергии в контуре с током I, находящемся в поле постоянного магнита, выражается формулой:
Wэм I , |
(5) |
где Ψ – полное потокосцепление данного контура с магнитным молем постоянного магнита.
Тогда выражение (2) можно представить как |
|
|||
M вр |
|
Id |
. |
(6) |
|
||||
|
|
d |
|
|
Полное изменение потокосцепления с рамкой через конструктивные параметры рамки запишется следующим образом:
d BSwd ,
где B – магнитная индукция в воздушном зазоре; S – площадь рамки; w – число витков рамки.
Если предположить, что dα = 1 рад, то произведение BSw – величина постоянная для каждого данного прибора и равная изменению потокосцепления при повороте рамки на 1 рад. Обозначая его через Ψ0, запишем:
0 BSw.

12
Тогда
d 0d . |
(7) |
Подставляя выражение (7) в формулу (6), получим выражение вращающего момента для магнитоэлектрического механизма в следующем виде:
M вр I 0 . |
(8) |
Установившееся положение подвижной части измерительного механизма наступает при равенстве вращающего и противодействующего моментов, т. е. с учетом формулы (3) запишем:
I 0 W .
Следовательно, уравнение преобразования для магнитоэлектрического измерительного механизма будет иметь вид:
I 0 |
W SI I , |
(9) |
где SI – чувствительность измерительного механизма по току. Можно записать формулу (10) через конструктивные пара-
метры измерительного механизма:
BSwI W . |
(10) |
Из формулы (10) следует, что угол отклонения подвижной части измерительного механизма прямо пропорционален току
вкатушке, поэтому МЭП имеют равномерные шкалы.
Вмагнитоэлектрических приборах успокоение подвижной части приборов магнитоиндукционное, т. е. создается взаимодействием магнитных полей от вихревых токов в каркасе катушки и поля постоянного магнита.
Достоинства: 1) высокий класс точности – 0,05 и ниже; 2) равномерная шкала; 3) высокая и стабильная чувствительность; 4) малое собственное потребление энергии; 5) большой диапазон измерений; 6) на показания МЭП не влияют внешние магнитные и электрические поля.

13
Недостатки: 1) без преобразователей МЭП могут использоваться только в цепях постоянного тока; 2) малая нагрузочная способность; 3) сложность и высокая стоимость; 4) влияние колебаний температуры на показания МЭП.
Применение: магнитоэлектрические измерительные механизмы используются в амперметрах, вольтметрах, омметрах
игальванометрах (обычных, баллистических и вибрационных).
2.4.Электромагнитные измерительные приборы
Вэлектромагнитных измерительных приборах (ЭМП) для перемещения подвижной части используется энергия магнитного поля системы, состоящей из катушки с измеряемым током и одного или нескольких сердечников, выполненных из ферромагнитных материалов. Получили распространение три основные конструкции ЭМП: с плоской катушкой; с круглой катушкой; с замкнутым магнитопроводом.
Рис. 3. Схема устройства электромагнитного прибора: 1 – ось; 2 – спиральная пружина; 3 – катушка;
4 – стрелка; 5 – сердечник; 6 – успокоитель
В ЭМП с плоской катушкой (рис. 3) сердечник 5 из пермаллоя под действием сил поля втягивается в узкий воздушный зазор катушки 3 с обмоткой из медного провода. Ось 1 сердечника 5 со стрелкой 4, спиральной пружиной 2 и подвижной частью успо-
14
коителя 6 крепится на опорах или растяжках. Успокоители в ЭМП могут быть воздушные, жидкостные или магнитоиндукционные.
Энергия электромагнитного поля катушки с током I выра-
жается формулой: |
I 2 L |
|
|
|
W |
. |
(11) |
||
|
||||
эм |
2 |
|
|
|
|
|
|
Используя выражение (2), можно записать:
M вр |
1 |
I |
2 |
dL |
. |
(12) |
2 |
|
d |
||||
|
|
|
|
|
Приравнивая вращающий и противодействующий моменты, получим:
W |
1 |
I |
2 |
dL |
. |
(13) |
|
|
|
2d
Из выражения (13) получаем уравнение преобразования для ЭМП:
|
1 |
I |
2 |
dL |
. |
(14) |
2W |
|
d |
||||
|
|
|
|
|
Из выражения (14) видно, что шкала электромагнитного прибора квадратичная. Конструктивно добиваются равномерности шкалы, начиная с 1/5 части верхнего предела измерения.
Достоинства: 1) простота конструкции и высокая надежность; 2) хорошая перегрузочная способность; 3) возможность работы в цепях постоянного и переменного токов; 4) классы точности 1,0; 1,5; 2,5; 5) частотный диапазон 45 Гц–10 кГц; 6) диапазон измерения по току 0,005–300 А (при прямом включении) и до 20000 А с измерительным трансформатором тока (ТТ); 7) диапазон измерения по напряжению 1,5–60 В (при прямом включении) и до 6000 В с измерительным трансформатором напряжения (ТН).
Недостатки: 1) большое собственное потребление энергии; 2) невысокая чувствительность; 3) неравномерная шкала; 4) влияние внешних магнитных полей, температуры и частоты питающего напряжения на показания ЭМП.
15
Применение: электромагнитные приборы используются в качестве амперметров, вольтметров, фазометров, частотомеров, генриметров и фарадметров.
2.5. Электродинамические измерительные приборы
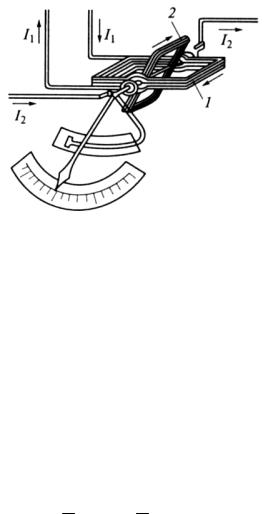
В электродинамических измерительных приборах (ЭДП) для перемещения подвижной части используется энергия системы, состоящей из подвижной и неподвижной рамок с токами. Неподвижная часть может иметь одну, чаще две катушки, соединенные между собой параллельно или последовательно, намотанные медным проводом, внутри которых располагается подвижная катушка. Для ее включения в цепь измеряемого тока используются пружины или растяжки. Успокоение подвижной части – воздушное или магнитоиндукционное (рис. 4).
Рис. 4. Схема устройства электродинамического прибора: 1 – неподвижная катушка; 2 – подвижная катушка
Внутри неподвижной катушки 1 вращается укрепленная на оси подвижная катушка 2. Ток к ней подводится по спиральным токоподводящим пружинам, служащим одновременно для создания противодействующего момента.
Электромагнитная энергия системы двух катушек с токами I1 и I 2 определяется по формуле:
Wэм 1 L1I12 1 L2 I22 MI1I2 ,
2 2

16
где L1 и L2 – индуктивности неподвижной и подвижной катушек; М – взаимная индуктивность.
Индуктивности катушек L1 и L2 не зависят от положения в пространстве, поэтому первые два слагаемых равны нулю. Таким образом, получим следующее выражение для Mвр:
M вр dWэм I1I22 dM . d d
Приравнивая вращающий и противодействующий моменты, получим:
dMW I1I2 d .
Отсюда получаем уравнение преобразования ЭДП в виде:
1dM
W I1I2 d .
Учитывая, что взаимная индуктивность М катушек зависит от положения подвижной катушки относительно неподвижной, можно представить уравнение преобразования в общем виде:
|
1 |
I I |
|
f . |
(15) |
|
|
||||
W 1 |
2 |
|
|
||
Уравнение (15) действительно для случая работы |
ЭДП |
||||
на постоянном токе. На переменном токе показания ЭДП зависят от произведения действующих значений токов I1 и I2 и от сдвига по фазе φ между этими токами:
|
f |
I I |
2 |
cos . |
(16) |
|
|||||
|
W |
1 |
|
|
|
|
|
|
|
|
Достоинства: 1) используются в цепях постоянного и переменного токов; 2) классы точности 0,05; 0,1; 0,2; 3) диапазон измерений на постоянном токе 0,015–10 А (прямое включение),
17
на переменном токе 0,005–200 А (прямое включение), до 600 А с ТТ; 4) диапазон измерений постоянного напряжения 1,5–600 В (прямое включение), 7,5–6000 В с Rдоб, переменного тока до 30000 В с ТН; 5) частотный диапазон до 40 кГц.
Недостатки: 1) большое собственное потребление энергии; 2) неравномерная шкала; 3) невысокая чувствительность, 4) малая перегрузочная способность; 5) недопустимость тряски и вибрации; 5) сложная конструкция; 6) высокая стоимость; 7) влияние внешних магнитных полей, температуры и частоты питающего напряжения на показания ЭДП.
Применение: электродинамические приборы используются в качестве амперметров, вольтметров, ваттметров, частотомеров, фазометров (на принципе логометров).
2.6. Ферродинамические измерительные приборы
Ферродинамические приборы (ФДП) отличаются от ЭДП тем, что неподвижная катушка расположена на сердечнике из ферромагнитного материала. Это приводит к значительному увеличению Mвр и уменьшению влияния внешних магнитных полей. Однако наличие магмитопровода снижает точность этих приборов за счет наличия потерь на гистерезис и вихревые токи. Успокоение подвижной части – воздушное и магнитоиндукционное.
Достоинства: 1) не боятся тряски и вибраций; 2) внешние магнитные поля мало влияют на их показания; 3) классы точности 0,2; 0,5; 1,0; 1,5; 2,5.
Недостатки: 1) на постоянном токе погрешность возрастает за счет потерь на гистерезис; 2) влияние температуры и частоты питающего напряжения на показания ФДП; 3) частотный диапазон 10 Гц–1,5 кГц.
Применение: в основном используются в цепях переменного тока в качестве амперметров, вольтметров, ваттметров, большая величина Mвр позволяет использовать их в самописцах.
2.7.Электростатические измерительные приборы
Вэлектростатических измерительных приборах (ЭСП) для перемещения подвижной части используется принцип взаимо-

18
действия двух или нескольких электрически заряженных проводников, т. е. здесь в отличие от механизмов других систем перемещение подвижной части осуществляется за счет непосредственно приложенного напряжения. Таким образом, эти приборы по своему принципу действия являются приборами, измеряющими только напряжение. Конструктивно электростатические измерительные приборы можно представить в виде плоского конденсатора с подвижными и неподвижными электродами. Перемещение подвижной части связано с изменением емкости системы, которая может быть осуществлена либо путем изменения площади электродов, либо путем изменения расстояния между ними.
Рис. 5. Схема устройства электростатического прибора:
1 – подвижная пластина; 2 – неподвижные пластины; 3 – ось
На рис. 5 приведена схема устройства электростатического прибора. Подвижная алюминиевая пластина 1, закрепленная вместе со стрелкой на оси 3, может перемещаться, взаимодействуя с двумя электрически соединенными неподвижными пластинами 2. Входное напряжение подается на подвижную и неподвижную пластины. Под действием электростатических сил подвижная пластина втягивается между неподвижными пластинами.
Обобщенное выражение Mвр для электростатического прибора, определяемое по формуле (2), имеет вид:
M вр dWэм .
d

19
Энергия поля заряженного конденсатора определяется уравнением:
Wэм 1 U 2C . 2
Поэтому
M вр 1 U 2 dC , 2 d
где C – емкость, образуемая между электродами электростатического прибора.
Приравнивая вращающий и противодействующий моменты, получим:
|
1 |
U |
2 |
dC |
. |
(17) |
2W |
|
d |
||||
|
|
|
|
|
Из выражения (17) видно, что шкала измерительного прибора квадратичная. Конструктивно добиваются частичной линеаризации шкалы так, что рабочая часть начинается примерно с 1/5 части общей длины шкалы. Успокоение подвижной части – магнитоиндукционное или воздушное.
Достоинства: 1) отсутствие потребления энергии в цепях постоянного тока и незначительное потребление в цепях переменного тока; 2) классы точности 0,05; 0,1; 1,0; 1,5; 2,5; 3) частотный диапазон 20 Гц–10 МГц; 4) диапазон измерений постоянного напряжения 10 В–7500 кВ, переменного напряжения 30 В–7500 кВ; 5) независимость показаний от изменения температуры, частоты и формы кривой измеряемого напряжения, а также внешних магнитных полей.
Недостатки: 1) низкая чувствительность; 2) неравномерная шкала; 3) влияние внешних электрических и электростатических полей на показания ЭСП.
Применение: электростатические приборы используются в цепях постоянного и переменного токов в качестве вольтметров. Для расширения пределов измерения по напряжению используются резисторные и емкостные делители напряжения.
20
2.8.Индукционные измерительные приборы
Виндукционных измерительных приборах (ИИП) особым положением катушек получают вращающееся электромагнитное поле, которое, пронизывая алюминиевый цилиндр, индуцирует
внем вихревые токи, что вызывает возникновение вращающего момента. С помощью спиральных бестоковых пружин создается противодействующий момент и обеспечивается пропорциональность измеряемой величины отклонению подвижной системы.
Зависимость показаний ИИП от колебаний частоты тока и температуры ограничивает применение этих приборов.
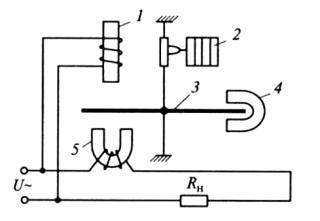
Индукционный измерительный механизм используется в самопишущих приборах, для построения указателя вращающегося поля, синхроскопа, частотомера и в счетчиках электрической энергии. Упрощенная схема однофазного индукционного счетчика электрической энергии показана на рис. 6.
Рис. 6. Схема однофазного индукционного счетчика:
1 – катушка напряжения; 2 – счетный механизм; 3 – алюминиевый диск; 4 – постоянный магнит; 5 – П-образный сердечник
Механизм прибора состоит из двух неподвижных магнитопроводов: трехстержневого сердечника с катушкой напряжения 1 и П-образного сердечника 5 с двумя последовательно соединенными токовыми катушками, счетного механизма 2, алюминиевого диска 3, жестко укрепленного на оси, и постоянного магнита 4, служащего для создания тормозного момента.