


Ф. 4.1.2.
ФГБОУ ВПО
«УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра Информационно-измерительной техники
|
100 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Подп. и дата |
|
|
Подп. и дата |
|
|
Взаим. Инв. № |
|
|
Инв. № подл. |
|
|
Инв. № дубл. |
|
Пояснительная записка
к курсовому проекту по дисциплине:
Основы проектирования приборов и систем
Вариант 4.3
|
1205.3.ХХ.ХХХ.0000 ПЗ |
|
Группа |
Фамилия, И. О. |
Подпись |
Дата |
Оценка |
|
Студент |
Мухаметдинов Р.Н. |
|
|
|
|
Консультант |
Ясовеев В.Х. |
|
|
|
|
Принял |
Ясовеев В.Х. |
|
|
|
Уфа 2015
Содержание
Введение 3
1 Теоретические сведения 4
2 Техническое задание 8
3 Расчетная часть 10
4 Разработка принципиальной схемы измерения скорости вращения двигателя: расчет и выбор элементов 12
4.2 Расчет таймера и счетчиков 14
Заключение 18
Список использованной литературы 19
Введение
Мы будем в данной работе рассматривать измерители угловой скорости. Датчики угловой скорости (энкодеры) определяют скорость вращения контролируемого объекта. Данный тип датчиков часто применяется для определения линейной скорости, потому как прямолинейное движение легко преобразовать во вращающее. Контролирование скорости вращения двигателя позволяет управлять технологическими процессами и нормировать условия работы электрических двигателей, что приводит к увеличению надежности и срока работы устройств. Контроль может осуществляться как контактно, так и бесконтактно. Наиболее перспективно бесконтактное определение частоты вращения.
1 Теоретические сведения
1.1 Классификация методов и средствугловой скорости
Датчики угловой скорости (энкодеры) определяют скорость вращения контролируемого объекта. Данный тип датчиков часто применяется для определения линейной скорости, потому как прямолинейное движение легко преобразовать во вращающее. На рис. 1.1 показаны виды датчиков угловой скорости вращения, которые могут быть применены в работе.

Рис. 1.1.Виды датчиков угловой скорости вращения
Принцип действия магнитного энкодера основан на эффекте Холла. Постоянный магнит устанавливается на вращающийся объект. Чувствительный элемент датчика отслеживает изменения полюсов постоянного магнита, а, следовательно, и его вращение.
Чувствительный элемент регистрирует прохождение в его зоне постоянного магнита по изменению напряжения на выходе его выводов вследствие действия эффекта Холла. Согласно принципу действия данного эффекта, чувствительный элемент следует выполнять в виде металлического проводника, подключенного к источнику постоянного тока.
Таким образом, измерение скорости вращения вала, с присоединенными к нему постоянными магнитами сводится к измерению количества случаем изменения разности потенциалов на выходе чувствительного элемент. Величина данного изменения определяется по формуле:
![]() ,
(5)
,
(5)
где n – концентрация носителей заряда в проводнике; e – заряд электрона; j – плотность тока; B – индукция постоянного магнитного поля.
Составляющая
![]() в данном выражении называется константой
Холла и для многих электропроводящих
материалов может быть найдена по
справочнику.
в данном выражении называется константой
Холла и для многих электропроводящих
материалов может быть найдена по
справочнику.
Общий вид магнитного энкодера представлен на рис. 1.2.

Рис. 1.2.Общий вид магнитного энкодера
Магниторезистивный энкодер состоит из катушки, помещенной в магнитное поле, катушка закрепляется на валу рис. 1.3. При вращении катушки ее витки будут изменять положение относительно поля, они будут то параллельны полю, то перпендикулярны, соответственно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Таким образом, восстановление сигнала производится на основании расчета частоты переменного тока на выходе чувствительного элемента.
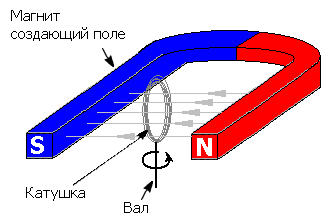
Рис. 1.3.Общий вид магниторезистивного энкодера
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора рис. 1.4. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Частота тока в данном случае пропорциональна числу считанных импульсов.
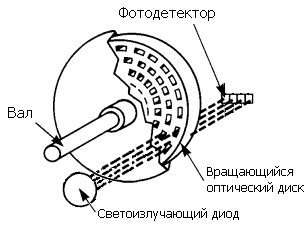
Рис. 1.4.Общий вид оптического энкодера