

Л
.3.pdf2.3. Кутомірно-далекомірні системи ближньої навігації.
Системи ближньої навігації (СБН) - регіональні однопозиційні системи, призначені для визначення азимута й дальності літального апарату відносно радіонавігаційних точок в межах дальності прямої видимості. Для роботи СБН виділені ділянки діапазону метрових і дециметрових хвиль.
Основа систем ближньої навігації - мережа незалежних наземних радіомаяків (РМ). Розрізняють азимутальні радіомаяки (АРМ), далекомірні радіомаяки (ДРМ) і азимутально-далекомірні радіомаяки (АДРМ), які встановлюють на аеродромах та в маршрутних точках, що відповідають характерним ділянкам повітряних трас.
Навігаційні параметри систем ближньої навігації - азимут і дальність визначаються на літальному апараті відносно радіонавігаційної точки (РНТ), де розміщений радіомаяк. При відомій висоті польоту цих даних досить для знаходження положення літального апарату в просторі. Тобто системи ближньої навігації відносяться до класу кутомірних, далекомірних або азимутально-далекомірних систем.
У системах ближньої навігації виділяють канал азимута (КА) і канал дальності (КД). До кожного з каналів входить наземний радіомаяк і бортова апаратуру (БА) літального апарату.
За типом системи ближньої навігації відрізняються:
по виду інформативного параметра сигналу, що використовується для визначення азимута;
по формату сигналу, що використовується для визначення дальності;
за структурою побудови системи в цілому.
На сьогоднішній день найбільшого поширення в авіації одержали:
розроблена в СРСР радіотехнічна система ближньої навігації (РСБН);
розроблена в США та стандартизована IКAO система
VOR/DME;
розроблена в США для Військово-Повітряних Сил система
ТАСАN.
Система РСБН являється кутомірно-далекомірною часовою (імпульсною) радіонавігаційною системою, яка для визначення азимута й дальності використовує метод вимірювання часових проміжків. До
складу системи входять азимутально-далекомірні радіомаяки і бортове обладнання літального апарату. Система працює в діапазоні дециметрових хвиль. Відмінна риса системи - можливість наземного спостереження повітряної обстановки, визначення координат і впізнавання ЛА, а також використання БА для посадки при наявності посадкових РМ дециметрового діапазону.
Система VOR/DME складається з окремих підсистем:
кутомірної системи VOR, заснованої на фазовому методі визначення азимута;
далекомірної системи DME, заснованої на методі
вимірювання часових проміжків для визначення дальності. Системи VOR та DME можуть використовуватися як
самостійно (окремо), так і разом. Розміщення цих систем разом в одній РНТ створює систему спільну кутомірно-далекомірну систему VOR/DME. На борту літального апарату для визначення азимута й дальності до РНТ розміщуються окремі пристрої кутомірний та далекомірний. АРМ працює в діапазоні метрових хвиль, а ДРМ - дециметрових хвиль.
Основні параметри кутомірних (КА) та далекомірних (КД) каналів радіотехнічних систем ближньої навігації представлено в таблиці 2.4.
Таблиця 2.4.
Параметр |
РСБН |
VOR/DME |
ТАСАN |
||||
КА |
КД |
КА |
КД |
КА |
КД |
||
|
|||||||
Похибка вимірювання |
0,25° |
200м |
2,33° |
185 |
4,5° |
185 |
|
місцеположення ЛА (°; м) |
(1°)* |
||||||
Діапазон частот (МГц): |
|
|
|
|
|
|
|
канал азимута |
873- |
- |
108- |
- |
960- |
- |
|
(тільки прийом) |
935 |
118 |
1215 |
||||
|
|
|
|||||
канал дальності |
- |
772- |
- |
1025- |
- |
1025- |
|
(запит) |
812 |
1150 |
1150 |
||||
|
|
|
|||||
канал дальності |
- |
939- |
- |
960- |
- |
960- |
|
(відповідь) |
1000 |
1215 |
1215 |
||||
|
|
|
|||||
Кількість частотно- |
88 |
88 |
160 |
252 |
252 |
252 |
|
кодових каналів |
|||||||
|
|
|
|
|
|
||
Пропускна здатність |
∞ |
100 |
∞ |
100 |
∞ |
100 |
|
(кількість ЛА) |
|||||||
|
|
|
|
|
|
||
Примітка: * - грубий (точний) канали.
Система ТАСАN за принципом дії й призначенню близька до системи VOR/DME. У деяких варіантах систем ТАСАN можливе наземне спостереження повітряної обстановки. До складу системи входить АДРМ і БА, що вимірює азимут і дальність до ЛА. Відома також система VOR/TACсполучення кутомірного РМ VOR із ДРМ системи ТАСАN.
Формування навігаційної інформації в СБН
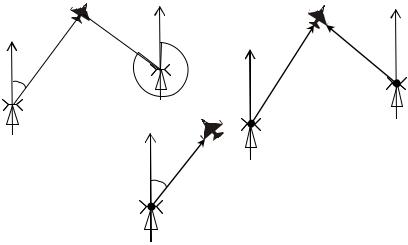
Визначення місцеположення літального апарату в СБН може виконуватися по інформації:
про азимути двох АРМ (рис. 2.20.а);
про дальності до двох ДРМ (рис. 2.20.б)
про азимут і дальність до одного АДРМ (рис. 2.20.в).
|
|
Пн |
|
Пн |
Пн |
|
α2 |
Пн |
D2 |
|
|
|||
|
|
|
|
D1 |
α1 |
|
|
|
|
|
а) |
Пн |
|
|
|
|
|
|
|
|
|
D |
|
б) |
|
|
|
|
|
|
|
α |
|
|
в)
Рис. 2.20 Методи визначення місцеположення ЛА в СБН Третя координата в будь-якому випадку визначається
висотоміром, що не входить до складу системи ближньої навігації. Особливістю визначення місцеположення літального апарату є
можливість вирішення навігаційного завдання на площині, тому що зазвичай відстань до радіомаяка набагато перевищує висоту польоту повітряного судна. На дальності близько 100 км від радіонавігаційної точки при висоті польоту 10 км похибка
обумовлена заміною похилої дальності, її проекцією на горизонтальну площину не перевищує 1%.
Навігаційна інформація формується за допомогою наземних радіомаяків, принцип роботи яких залежить від каналу СБН і типу РМ. Канал азимута СБН будують на основі часового або фазового методу обробки інформації. Амплітудний радіомаяк формує азимутальний сигнал, інформативний параметр якого залежить від азимута точки прийому. Момент початку відліку азимута в бортовому обладнанні визначається по опорному сигналу, що передається із радіомаяка. Інформація про азимут закладена в зміні прийнятого сигналу щодо опорного за часом (часовий метод) або по фазі (фазовий метод). Часовий метод використовується у вітчизняних системах ближньої навігації (типу - РСБН) , фазовий - у закордонних (типу - VOR). У системі VOR/DME залежно від структури випромінюваного АРМ сигналу розрізняють стандартний VOR, доплерівский VOR (DVOR) і прецизійний доплерівский VOR (PDVOR).
Канал дальності всіх СБН заснований на принципі «запитвідповідь», що сприяє збільшенню точності та дальності дії систем, але приводить до обмеження їх пропускної здатності.
2.3.1. Радіотехнічна система ближньої навігації (РСБН)
РСБН призначені для забезпечення близької навігації, міжлітакової навігації та посадки ЛА в простих та складних метеорологічних умовах. Вони вирішують такі основні задачі:
виконання польоту за заданим маршрутом;
неперервне визначення місцеположення літака у заданій системі координат;
визначення навігаційних елементів польоту;
виконання корекції бортових обчислювальних пристроїв;
вивід ЛА на ЗПС по курсу та глісаді з визначенням відстані до точки приземлення;
визначення полярних координат літаків на наземному
індикаторі кругового огляду і їх індивідуальне розпізнавання. Загалом РСБН являє собою комплекс наземного та бортового
обладнання. Бортове обладнання РСБН містить антенно-фідерну систему, приймач, передавач, канал вимірювання азимуту і канал
вимірювання дальності D, а також засоби їх індикації наприклад КПІ КСЕІС або РМІ. Наземне обладнання РСБН містить всенаправлений азимутально-далекомірний радіомаяк (АДРМ) та посадочну радіомаячну групу (ПРМГ).
Наземне обладнання РСБН представляє собою кутомірнодалекомірний радіомаяк (КДРМ), який складається з приймача (ПРМД) та передавача (ПРДД) далекоміра, передавача опорних сигналів (ПОС), передавача азимутальних сигналів (ПАС) з гостронапрямленою поворотною антеною, індикатора кругового огляду (ІКО). При встановленні на місцевості наземний радіомаяк з великою точністю орієнтується відносно істинного меридіану. При розміщенні на аеродромі його встановлюють на відстані 500…800 м від центру осі ЗПС.
ПРМГ складається з курсового радіомаяка (КРМ), глісадного радіомаяка (ГРМ) і ретранслятора далекоміра (РД). ГРМ звичайно встановлюється на віддаленні 200…450 м від початку ЗПС і 120…180 м ліворуч від її осі (якщо дивитись з літака, що іде на посадку). КРМ встановлюється на осі ЗПС на відстані 500…1200 м від її кінця.
З точки зору структурної побудови РСБН містить три тракти:
-тракт близької навігації;
-тракт міжлітакової навігації;
-тракт посадки.
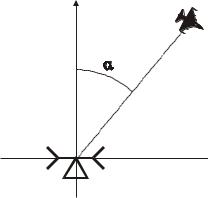
Пн |
Тракт |
близької |
навігації |
|
|
||||
|
забезпечує визначення на борту |
|||
|
та ІКО наземного |
радіомаяка |
||
|
азимуту літака і дальності до |
|||
D |
наземного радіомаяка (НРМ) в |
|||
полярній |
системі |
координат |
||
|
||||
|
(рис 2.21). В полюсі полярної |
|||
|
системи |
встановлюється |
||
Паралель |
наземний радіомаяк, який з |
|||
високою точністю орієнтований |
||||
|
по істинному меридіану. |
|||
Рис. 2.21. Параметри, які вимірюються в РСБН

Спрощена структурна схема тракту близької навігації зображена на рис. 2.22.
|
f1 |
|
Наземне |
Бортове |
|
|
обладнання |
|
ПРМД |
|
|
обладнання |
|
|
|
|
|
|
|
ПРД |
|
|
ІКО |
|
f3 |
ПРДД |
|
D СВД |
|
|
|
|
ffАЗ |
ДОС ДОС ДОС |
|
СВА |
2 |
35 |
36 180 |
|
|||
|
|
f35 |
|
ПРМ |
ff362 |
|
|
|
|
ПОС |
ПАС |
Рис. 2.22 Спрощена структурна схема РСБН
Принцип дії каналу дальності РСБН
Дальність від літака до НРМ визначається радіодалекоміром імпульсного типу (який працює за принципом “запит-відповідь”) вимірюванням сумарного часу розповсюдження сигналу запиту від ЛА до НРМ і сигналу відповіді від НРМ до ЛА.
Схема вимірювання дальності формує імпульси запуску передавача (рис. 2.23. поз 1).
1 
2 |
t |
|
t
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
4 |
|
|
t D |
|
D |
|
|
|
|
||||
|
|
|||||
|
|
|||||
|
|
|
|
|
|
|
t
Рис. 2. 23. Імпульси запуску передавача
Бортовий передавач з надходженням кожного імпульсу запуску (рис. 2.23. поз 1) формує кодований сигнал запиту дальності, що являє собою подвійний імпульс НВЧ коливань (рис. 2.23. поз 2). Кодування сигналу запиту, як і сигналу відповіді, збільшує завадозахищеність каналу вимірювання дальності. Часовий інтервал між імпульсами визначається робочим каналом. Сигнал запиту дальності випромінюється всенаправленою передавальною антеною на частоті f1. Одночасно з бортовим передавачем запускається схема вимірювання дальності (СВД). Сигнали запиту дальності приймаються наземним приймачем далекоміра (ПРМД). Передавач далекоміра (ПРДД) на кожний запит виробляє кодований відповідний сигнал дальності, який являє собою два імпульси НВЧ коливань. Відповідний сигнал дальності (рис. 2.23. поз 3) випромінюється всенаправленою передавальною антеною на частоті f3. Прийнятий бортовою приймальною антеною сигнал відповіді після перетворення у приймальних колах каналу дальності (підсилення, детектування та дешифрування) надходить на схему вимірювання дальності. В момент приходу відповідного сигналу (рис. 2.23. поз 4) схема вимірювання дальності обчислює час запізнення відповідного сигналу відносно моменту випромінювання сигналу запиту. Виміряний час прямо пропорційний дальності від літака до НРМ (час затримки сигналів у трактах бортового та наземного обладнання є постійним і враховується при калібруванні обладнання). Цей час з достатньою точністю перетворюється у виміряну дальність, яка передається на індикатори та обчислювачі.
Принцип дії каналу азимута РСБН
В радіотехнічній системі ближньої навігації (РСБН) для вимірювання азимута застосовується часовий (імпульсний) метод. Наземний радіомаяк має два передавачі, які працюють на одній несучій частоті (рис 2.24). Передавач амплітудного сигналу (ПРД АС) генерує безперервні не модульовані коливання, які випромінюються азимутальною антеною з діаграмою направленості у вигляді двох вузьких пелюстків у горизонтальній площині (ДН-1) з чітким нулем між ними.
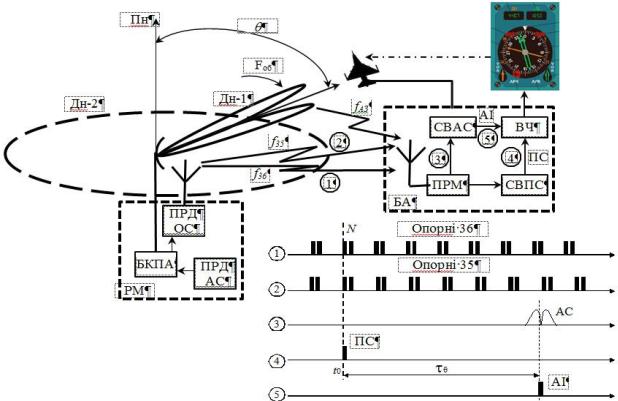
Рис. 2.24. Сструктурна схема та часові діаграми каналу вимірювання азимута.РСБН.
Ця діаграма направленості обертається з постійною кутовою швидкістю Ωоб=100 об/хв (тобто частотою Fоб =1,66 Гц), яку контролює блок керування положенням антени (БКПА).
Передавач опорних сигналів (ПРД ОС) працює в імпульсному режимі випромінювання, антена якого створює всюдинаправлену діаграму (ДН-2) та передає через неї дві серії опорних кодованих радіоімпульсів (f36 та f35), які відрізняються одна від одної на один кодований радіоімпульс за повний оберт азимутальної антени.
Опорні радіоімпульси мають частоти слідування відповідно f35= 58,1 Гц та f36= 60 Гц. ПРД ОС, який формує ці імпульси пов’язаний
зблок керування положенням антени (БКПА).
Вмомент проходження двохпелюстковою діаграмою направленості азимутальної антени північного напрямку географічного меридіану (Пн), що проходить через радіомаяк, кодовані імпульси серії «35» співпадають в часі випромінювання з кодованими імпульсами серії «36». Таке співпадіння являється початковою точкою відліку азимута повітряного судна і називається північним співпадінням (ПС).
Приймальний пристрій системи ближньої навігації літального апарата (ПРМ) постійно отримує і схемою вимірювання північного співпадіння (СВПС) (рис. 2.24) постійно порівнює кодовані опорні імпульси схем «35» і «36». В момент прийняття сигналу північного
співпадіння t0 починається відлік азимуту. Цей момент часу не залежить від кутового положення літального апарату відносно радіомаяка.
Азимутальний сигнал у вигляді двохпелюсткової діаграми направленості в момент північного співпадіння також направлений своєю рівносигнальною зоною в напрямку північного мередіану
(АС= 0, = 0). При подальшому переміщенні з постійною кутовою швидкістю Fоб діаграма направленості азимутального сигналу перетне точку місцеположення літального апарату. Приймальний пристрій системи ближньої навігації літального апарату через схему вимірювання азимутального сигналу (СВАС) (рис. 2.24) фіксує цей момент, як закінчення відліку азимуту (АС) і через вимірювач часу (ВЧ) фіксує часовий проміжок (τ ), що відповідає азимуту радіомаяка ( ).
Азимутальний сигнал на вході приймального пристрою має форму відповідно до проходження приймальної антени двома

пелюстками азимутальної діаграми направленості (рис. 2.25). По мінімуму між подвійним прийнятим сигналом виконується відлік часу tθ . Момент прийому азимутального сигналу t пов’язаний із вимірюваним азимутом θ наступним співвідношенням
t t0 t0 ,
Fоб
де t0 – поточний час початку відліку азимутального сигналу; τ – часовий інтервал, що відповідає азимуту радіомаяка; θ – азимут радіомаяка;
Fоб – кутова швидкість обертання азимутальної діаграми направленості.
Із даного виразу випливає, що τ = θ/Fоб, тобто виміряний часовий інтервал в прямо пропорційний азимуту радіомаяка.
АІ
Рис. 2.25. Азимутальний сигнал АС і відповідний йому азимутальний імпульс АІ
Для виділення інформації про азимут застосовують вимірник часу ВЧ (рис. 2.24), що запускається сигналом північного співпадіння ПС. Останній надходить зі схеми виділення СВПС і відповідає моменту направлення ДН азимутальної антени на північ. Закривається ВЧ азимутальним імпульсом АІ зі схеми СВАС. Азимутальний сигнал АС, прийнятий на ЛА, має форму подвійного дзвону, що повторює форму ДН-1. Імпульси АС виникають із частотою відповідно кутовій швидкості обертання азимутальної діаграми направленості. Для підвищення точності час