

Л
.1.pdfРОЗДІЛ 1 ОСНОВИ ПЕРЕДАЧІ ТА ПРИЙОМУ ІНФОРМАЦІЇ
РАДІОТЕХНІЧНИМИ СИСТЕМАМИ АВІОНІКИ
Радіотехнічні системи (РТС) призначені для передачі, прийому і виділення інформації, під якою будемо розуміти відомості про наявність у заданій області простору певних об’єктів та про різноманітні повідомлення, що передаються.
Вся інформація, що передається і отримується РТС, міститься в радіосигналах. Вони уявляють собою електромагнітні коливання, параметри яких (амплітуда, частота, початкова фаза) змінюються відповідно з повідомленнями, що передаються. В найпростішому випадку радіосигнал можна записати у вигляді немодульованого гармонічного сигналу: u t Acos 0t 0 ,
де A, 0 і 0 – амплітуда, кругова частота і початкова фаза сигналу;(t)= 0t + 0 – поточне значення фази радіосигналу.
1.1. Класифікація сигналів та їх характеристики а) за фізичним походженням сигнали бувають:
аналогові сигнали – звичайні безперервні сигнали, які визначені в любий момент часу, за виключенням кінцевої кількості точок розриву (рис. 1.1);
u(t)
t
Рис.1.1. Аналоговий сигнал.
дискретні сигнали – існують в суворо певні моменти часу
(рис. 1.2);
3
u(t)
t – крок дискретизації
t
Рис. 1.2. Дискретний сигнал.
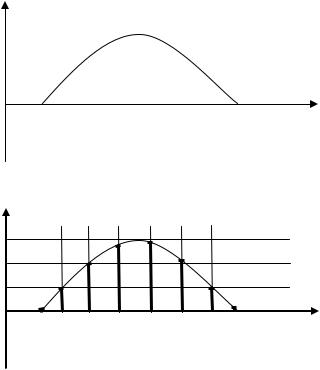
квантовані сигнали - можуть приймати суворо певні значення за рівнем амплітуди (рис. 1.3);
u(t)
t
Рис. 1.3. Квантований сигнал.
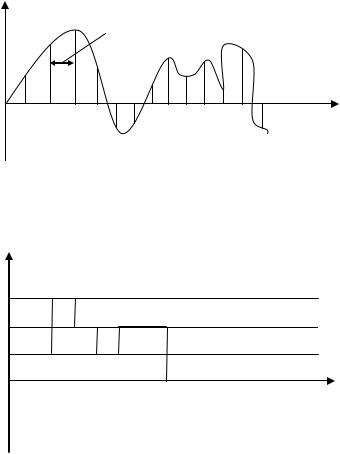
- цифрові сигнали – створюються з аналогових шляхом дискретизації за часом і квантування за рівнем. Кожному рівню сигналу надається своє число (рис. 1.4) як правило у вигляді сукупності двійкових цифр. В цілому цифрові сигнали являють собою сукупність відліків у цифровій формі.
4
u(t)
t
u(t)
000 001 010 |
011 |
011 |
010 |
001 000 |
t |
Рис. 1.4. Цифровий сигнал.
б) за періодичністю сигнали бувають:
Регулярні сигнали - сигнали, миттєве значення яких відоме в любий момент часу.
Регулярні сигнали діляться на періодичні і неперіодичні. Періодичним сигналом називається любий регулярний сигнал,
для якого виконується наступна рівність:
S(t) = S(t + kT),
де S - сигнал;
t - поточний час;
k - любе ціле натуральне число; T - період.
5

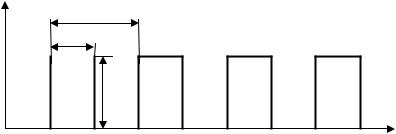
Прикладом періодичного сигналу є гармонічне коливання (рис. 1.5) або періодична послідовність прямокутних імпульсів (рис. 1.6).
S(t)
Am
T=2π/ω
Δt= φ0/ω
Рис. 1.5. Гармонічний сигнал.
Гармонійний сигнал описується математичним виразом:
S(t) = Amsin(ωt + φ0) = Amsin(2πft + φ0),
де Am - амплітуда сигналу; ω - кутова частота;
f - циклічна частота; φ0 - початкова фаза.
Основними параметрами сигналу є: амплітуда, період, частота, фаза, довжина хвилі.
Амплітуда (Am) – модуль найбільшого значення сигналу, [В, А]. Період (Т) - мінімальний проміжок часу, через який значення
сигналу повністю повторюються, [сек].
Частота (f) (циклічна частота) – кількість коливань у одиницю часу, як правило за одну секунду, [Гц].
Кутова частота (ω) – кількість коливань за 2 π, [рад]. Довжина хвилі (λ) – це шлях, який проходить ЕМХ протягом
одного періоду, [м].
 ,
,
де c = 3∙108 м/с – швидкість поширення радіохвиль.
6
Фаза (φ) – визначає при заданій амплітуді стан коливальної системи в любий момент часу. Любому значенню часу, вираженому в частках періоду, відповідає значення фази, виражене
в радіанах наприклад: |
|
|
t = T/4 → φ = π/2; |
t = T/2 → φ = π; |
t = T → φ = 2π. |
Періодична послідовність прямокутних імпульсів описується математичними виразами:
 ;
;
 ,
,
де ti - тривалість імпульсу;
Т - період слідування імпульсів; N – скважність.
S(t) |
|
|
|
|
|
|
|
|
|
|
T |
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
ti |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Am |
t
Рис. 1.6. Послідовність прямокутних імпульсів.
Неперіодичним сигналом називається любий регулярний сигнал, для якого буде виконуватись наступна математична нерівність:
S(t) ≠ S(t + kT).
Неперіодичні сигнали, як правило, є обмеженими у часі: окремі прямокутні імпульси або уривки гармонійних коливань (рис. 1.7).
7
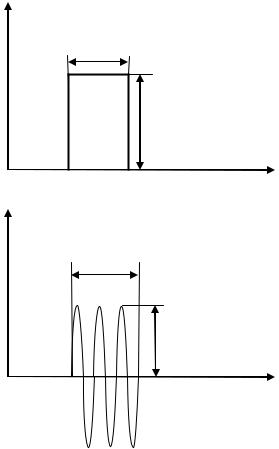
S(t)
|
T ∞ |
ti |
Am
t
а)
S(t)
ti T ∞
Am
t1 |
t2 |
t |
б)
Рис. 1.7. Неперіодичні сигнали
в) за типом модуляції:
-амплітудно-модульовані сигнали (АМС);
-частотно-модульовані сигнали (ЧМС);
-фазо-модульовані сигнали (ФМС);
-сигнали з фазовою маніпуляцією(ФМн);
-сигнали частотної телеграфії (ЧТ);
-імпульсні сигнали.
8
1.2. Поняття про модуляцію
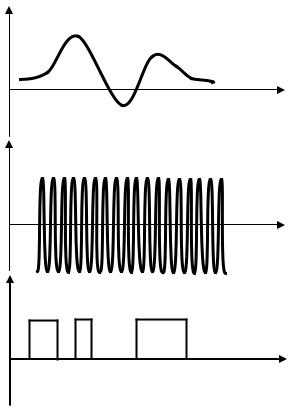
Для передачі повідомлень на відстані неелектричні повідомлення перетворюють в електричні сигнали низької частоти за допомогою мікрофону, телеграфного ключа, приладу зарядового зв’язку або телевізійної передавальної трубки (для передачі зображення) та ін., які являють собою неперервні коливання напруги u(t) і струму i(t) (рис. 1.8,а) або сукупність струмових посилок (посилок напруги) у вигляді прямокутних імпульсів (рис. 1.8,в).
u(t)
t
а)
і(t)
t
і(t)
б)
t
в)
Рис. 1.8. Часові діаграми: а) управляючого низькочастотного сигналу; б) несучого сигналу високої частот и; в) управляючих імпульсів струму.
9
Ці коливання отримали назву управляючих електричних сигналів. Управляючі сигнали не можна безпосередньо через антену випромінювати у простір і передавати в напрямку приймача, так як сигнал, який випромінюється, повинен мати довжину хвилі λ, що порівнюється з розмірами передавальної антени. Частота управляючих сигналів знаходиться в діапазоні 100Гц÷3кГц. Якщо ці значення перевести в розміри антени, то отримаємо довжину, яка дорівнює кільком кілометрам. Встановити антену такої довжини на літаку неможливо. Для усунення цієї невідповідності для передачі повідомлень використовують високочастотні сигнали у вигляді високочастотних гармонічних коливань напруги або струму (рис. 1.8,б), які генеруються в радіопередавальному пристрої, а електричний сигнал, в який перетворене повідомлення, що передається, використовують для управління коливаннями високої частоти. У цьому випадку довжина антени зменшується до кількох десятків сантиметрів.
Процес управління одним з параметрів високочастотного коливання (амплітуди, частоти, фази) за законом низькочастотного управляючого сигналу називається модуляцією.
Сигнал, який отримується внаслідок модуляції високочастотного коливання низькочастотним керуючим сигналом називається модульованим або радіосигналом. В залежності від того, який з параметрів високочастотного коливання змінюється, розрізняють амплітудну, частотну і фазову модуляцію.
Процес, зворотній до модуляції називається детектуванням і полягає у виділенні з модульованого високочастотного коливання корисного управляючого сигналу, інформація про який закладена в параметрах модульованого сигналу – амплітуді, частоті, фазі.
Модуляція ВЧ сигналу здійснюється у передачі, а детектування
– у приймачі.
1.2.1. Амплітудно-модульований сигнал
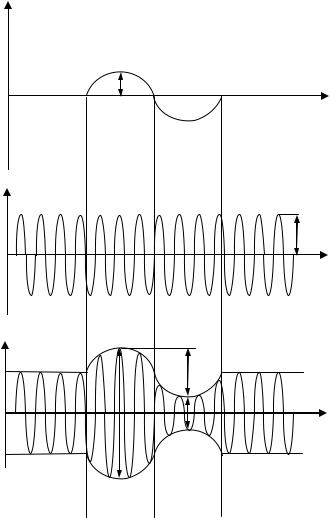
Принцип формування амплітудно-модульованого сигналу представлений на рис.1.9.
Низькочастотний керуючий сигнал формується за законом корисного повідомлення, яке необхідно передати:
S(t) = Sm cosΩt .
10
S(t) |
|
|
Низькочастотний |
|
|
|
керуючий сигнал |
|
|
Sm |
|
0 |
t1 |
t2 |
t |
|
|
|
Високочастотне |
|
|
|
несуче коливання |
|
|
|
Amн = const |
Amн(t)
Amн
t
Амплітудно-модульований сигнал
Aам(t)
ΔAm
Aам max |
Aам min |
|
t
Рис. 1.9 Амплітудно-модульований сигнал.
Високочастотне несуче коливання, яке має постійну амплітуду і частоту, змінюється за законом:
Aн(t) = Amн(t)cosωнt , де ωн >> Ω.
11

Амплітуда огинаючої високочастотного несучого коливання почне змінюватися за законом низькочастотного управляючого корисного сигналу:
Am(t) = Amн + ΔAmcosΩt ,
де ΔAm – максимальний приріст амплітуди згинаючої ВЧ коливання, який є пропорційним амплітуді управляючого сигналу
Sm.
Am(t) = Amн(1 + Am cosΩt),
Amн
позначимо Am = m, тоді
Amн
m = Amax Amin , Amax Amin
де m - коефіцієнт амплітудної модуляції. Звідси
Amн(t) = Amн(1 + mcosΩt).
Враховуючи вище сказане і підставивши вираз для Am до виразу для Aн(t), отримаємо загальний вираз для амплітудно-
модульованого сигналу (АМС): |
|
Aам(t) = Amн(1 + mcosΩt)cosωнt, |
при ψ=0. |
У випадку, якщо значення m буде більшим 1, отримаємо викривлення АМС. Це явище отримало назву перемодуляція. Тому для усунення викривлення інформації, яка передається, необхідно щоб величина m задовольняла умові
m ≤ 1.
1.2.2. Частотно-модульований сигнал
При частотній модуляції за законом низькочастотного керуючого сигналу
S(t) = Sm cosΩt
12