

2.2 Структурный анализ кулачкового механизма
По составленной структурной схеме выполним структурный анализ
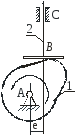
Рисунок 7- Структурная схема кулачкового механизма
A (1; 3), Vкл, В
B (1; 2), IVкл
C (2; 3), Vкл, П
У нас 2 подвижных звеньев,3 кинематических пар V класса и 1 кинематическая пара IV класса, получим:
W=3·2-2·3-1=1
Производим замену:
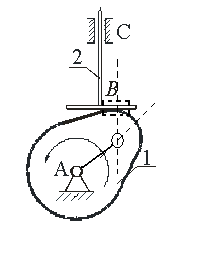
Рисунок 8-Замена кинематической пары IV класса
После замены кинематической пары IV класса получим:

Рисунок 9-Кинематическа пара
Определим число и класс кинематической пары:
B' (4; 2), Vкл, П
D (1;4), Vкл, В
Разделим на группы Ассура
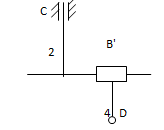
Рисунок 10- Группа Ассура II класса; 2-го порядка.
W=3∙2-2∙3=0
Группа Асура II класса, 2-го порядка

Рисунок 11- Механизм первого класса
W=3∙1-2∙1=1
Механизм первого класса
I(1;3)→ II (4;2)
Четырехзвенный кривошипно-ползунный механизм II класса
3 Кинематический анализ рычажного механизма
3.1 Определение положений звеньев и точек механизма
Зная длины отдельных звеньев механизма, на плане механизма показано положение механизма, для которого будем выполнять кинематический и силовой анализ.
Построение выполняем с учётом масштабного коэффициента длин:
µl=
LАB/(O1A)
= 1/220 = 0,004 [ ].
].
Строим план механизма, учитывая масштабный коэффициент:
(O1A) = LO1A/μl =0,25/0,004 = 62.5 мм
(O2В) = LО2В/μl=0,42/0,004 = 105 мм
(BC) = LBC / μl=1/0,004 = 250 мм
(BS4) = LBS4/ μl= 0,5/0,004 = 125 мм
(x) = lb/ μl= 0,06/0,004 = 15 мм
(y) = lc/ μl= 0,12/0,004 = 30 мм
Сначала построим точки О1 и О2. Они находятся друг относительно друга на ширине x = 15 мм и высоте у = 30 мм. Затем, относительно О1 и О2, найдём положение точки А и В. Циркулем от точки О1 чертим круг радиусом 62.5 мм. Это траектория движения точки А. И от точки О2 радиусом 105 мм, следовательно это траектория точки В. Далее, находим точку B, от выбранной точки А проводим отрезок до стойки О2, и далее по отрезку проводим до пересечения с окружностью О2В. Точка пересечения и будет точкой В. Для нахождения точки С, из найденной точки B проводим окружность радиусом BC = 250 мм и от стойки О2 отрезок параллельную Ох. Пересечение круга и отрезка определяет положение точки С.
3.2 Определение скоростей точек и звеньев механизма
Скорость точки A1:

Направим
 перпендикулярно O1A
в сторону
перпендикулярно O1A
в сторону
 .
.
На плане скоростей для заданного положения механизма изобразим скорость точки A отрезок pa=100мм, тогда масштабный коэффициент плана скоростей будет равен:
Для построения плана скоростей 2 и 3 группы Ассура, воспользуемся векторным уравнением:
От
точки a1
на плане скоростей проводим линию
действия скорости
 -параллельно
к OA,
затем из полюса p
проводим линию действия скорости
-параллельно
к OA,
затем из полюса p
проводим линию действия скорости
 - перпендикулярно к O2A.
Пересечение этих линий действия определит
точку b
– конец вектора
- перпендикулярно к O2A.
Пересечение этих линий действия определит
точку b
– конец вектора
 .
По теореме подобия можем записать:
.
По теореме подобия можем записать:

Отсюда :
:

На
линии, перпендикулярной к
 ,
находим точку b
– конец вектора
,
находим точку b
– конец вектора
 .
.
Теперь переходим к построению плана скоростей 4 и 5 группы Ассура. Воспользуемся уравнением, которое будет иметь вид:
От
точки b
на плане скоростей проводим линию
действия скорости
 -
перпендикулярно к BC,
а из полюса p
проводим линию действия скорости
-
перпендикулярно к BC,
а из полюса p
проводим линию действия скорости
 -
параллельно направляющей ползуна. Точка
пересечения этих линий действия определит
положение точки c.
-
параллельно направляющей ползуна. Точка
пересечения этих линий действия определит
положение точки c.
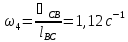
Найдем величины скоростей:




Угловая скорость звена 3:

Направление
 против
хода часовой стрелки.
против
хода часовой стрелки.
Угловая скорость звена 4:
Направляем
 по часовой стрелке.
по часовой стрелке.