

1. Построение и преобразование математической модели сау
1.1. Описание исходных данных
1.1.1. Принципиальная схема системы управления
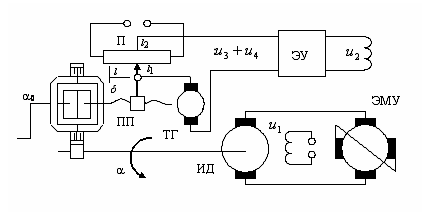
 Рисунок.1.1
Принципиальная схема САУ
Рисунок.1.1
Принципиальная схема САУ
1.1.2. Уравнение движения элементов сау
1) Исполнительный двигатель (ИД)
![]()
2) Электромашинный усилитель (ЭМУ)
![]()
3) Электронный усилитель (ЭУ)
![]()
4) Потенциометр (П)
![]()
5) Тахогенератор (ТГ)
![]()
6) Привод потенциометра (ПП)
![]()
7) Дифференциал (ДФ)
![]()
1.1.3. Параметры элементов системы
-
Элементы
ИД
ЭМУ
ЭУ
П
ТГ
ПП
23
Т1
Т2
k1
T3
T4
k2
k3
k4
T5
k5
k6
c
c
рад/с*В
c
с
-
-
В/рад
c
с*В/рад
-
0,05
0,08
4,0
0,02
0,02
95
850
0,02
0,005
0,06
0,050
1.2. Составление функциональной схемы системы
Объектом управления является исполнительный двигатель, угол поворота а, которого должен поддерживаться равным углу а0 поворота рукоятки. Сравнивающим устройством является дифференциал (ДФ), угол поворота δ которого равен разности углов а0 и а. Привод потенциометра (ПП) с помощью червячной передачи преобразует угол поворота δ в пропорциональное ему перемещение l движка потенциометра. Разность потенциалов между неподвижным движком потенциометра l2 и подвижным движком l1 пропорциональна смешению l движка l1. Перемещение l движка l1 дополнительно преобразуется тахогенератором (ТГ) в выходное напряжение и4. Суммарное напряжение (и3+и4) подастся на вход электронного усилителя (ЭУ). Напряжение и2 выхода (ЭУ), пропорциональное сумме (и3+и4) подастся на обмотку возбуждения (ОВ) электромашинного усилителя (ЭМУ). ЭМУ является усилителем мощности, преобразующим напряжение и2 в напряжение и1 подаваемое на обмотку якоря (ОЯ) исполнительного двигателя (ИД). Изменение напряжения и1 приводит к повороту на угол а ИД.
Таким образом, принципиальная схема включает:
объект управления — исполнительный двигатель (ИД);
сравнивающее устройство- дифференциал (ДФ);
измерительное устройство - привод движка потенциометра (ПП);
преобразующее устройство — потенциометр (П) и тахогенератор (ТГ);
исполнительный механизм - электронный усилитель (ЭУ);
регулирующий орган - электромагнитный усилитель (ЭМУ).
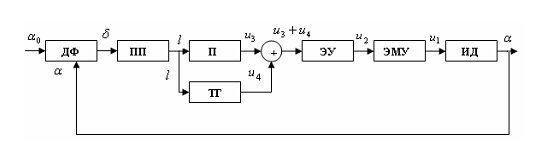
Рисунок.1.2 Функциональная схема САУ
1.3. Определение передаточных функций звеньев.
1.Звенья заданы обыкновенными дифференциальными уравнениями с постоянными коэффициентами
1)Исполнительный двигатель (ИД)
![]()
![]()
2)Электромашинный усилитель (ЭМУ)
![]()
3)Электронный усилитель (ЭУ)
![]()
4)Потенциометр (П)
![]()
5)Тахогенератор (ТГ)
![]()
6)Привод потенциометра (ПП)
![]()
7)Дифференциал (ДФ)
![]()
2. Применим преобразование Лапласа. Заменим переменные вещественного аргумента t на соответствующие им переменные комплексного аргумента s. Дифференцирование заменим умножением на s, повторное дифференцирование - на s2 и т.д.
1)Электродвигатель (ИД)
![]()
2)Электромашинный усилитель (ЭМУ)
![]()
3)Электронныйусилитель (ЭУ)
![]()
4)Потенциометр (П)
![]()
5)Тахогенератор(ТХ)
![]()

6) Привод потенциометра (ПП)
![]()
7) Дифференциал (ДФ)
![]()
3. Зададим начальные условия нулевые.
4. Из полученных алгебраических уравнений в комплексной области необходимо найти отношение изображения выхода звена к изображению входа. Это изображение и есть передаточная функция.
![]()
![]()
где: u 1 (s) - изображение напряжения на входе ИД, поступающее с выхода ЭМУ. α(s) - изображение угла поворота на выходе ИД.
![]()
![]()
-передаточная функция ИД
2) Электромашинный усилитель (ЭМУ):
где:
![]() -изображение
напряжения на входе ЭМУ, поступающее с
выхода
электронного
усилителя ЭУ.
-изображение
напряжения на входе ЭМУ, поступающее с
выхода
электронного
усилителя ЭУ.
![]() -
изображение
напряжения на выходе ЭМУ.
-
изображение
напряжения на выходе ЭМУ.
![]()
где: W2(s)
=
- передаточная
функция ЭМУ.
3) Электронный усилитель (ЭУ):
![]()
u3 (s) -изображение напряжения на выходе потенциометра П
u4 (s) -изображение напряжения на выходе тахогенератора ТГ
(u3(s) + u4(s))- изображение суммы напряжений на входе ЭУ изображение суммы напряжений на входе ЭУ

W3 (s) = k3 – Передаточная функция ЭУ
 4)
Потенциометр (П):
4)
Потенциометр (П):
u3(s) = k4l(s)
где: l(s) - изображение перемещения движка потенциометра, поступающего на вход потенциометра П.
u3(s) - изображение напряжения на выходе потенциометра П.
![]()
где:
![]() -
передаточная функция потенциометра П.
-
передаточная функция потенциометра П.
5) Тахогенератор (ТГ):
где: l(s) - изображение перемещения движка потенциометра, поступающего на вход тахогенератора ТГ с выхода привода движка потенциометра ПП. u4(s)- изображение напряжения на выходе тахогенератора ТГ
![]()
- передаточная функция тахогенератора ТГ.
 6)
Привод
6)
Привод
потенциометра (ПП): l(s) = k6δ(s)
где: δ(s) - изображение угла поворота дифференциала ДФ, поступающий на вход потенциометра ПП.
l(s) - изображение перемещения на выходе движка потенциометра ПП.
где: W6 (s) = k6 - передаточная функция привода движка потенциометра ПП
7) Дифференциал (ДФ):
![]()
![]()
![]()