

СВМ
.pdf6.3 Влияние дефектов на вибрацию редуктора
Основными узлами редуктора, испытывающими динамические нагрузки и подверженными износу, являются шестерни, подшипники и соединительные муфты, связывающие редуктор с другими машинами. Дефекты шестерен и зубчатых зацеплений приводят к появлению вынуждающих сил различной природы. Это могут быть и кинематические силы из-за отклонений формы зубцов от расчетной в зоне механического контакта, и ударные воздействия, определяемые изменением зазоров в зоне зубчатого зацепления, и параметрические силы из-за изменения жесткости зубьев в зоне зацепления, и , наконец, силы трения между контактирующими поверхностями. Природа появления вынуждающих сил в подшипниках и соединительных муфтах может быть такой же, как и в зубчатых зацеплениях. Практически все основные виды дефектов шестерен и зубчатых зацеплений, влияющие на их ресурс, приводят к изменению колебательных сил, действующих в зацеплении, и динамических нагрузок на шестерни и их подшипники. Это означает, что такие дефекты могут быть обнаружены по вибрации редукторов.
В список дефектов шестерен и зубчатых зацеплений, возникающих при сборке редуктора, его монтаже и эксплуатации входят:
-бой шестерни;
-износ зубьев шестерни;
-трещины и сколы на зубьях, отсутствие отдельных зубьев;
-смещение точек контакта зубьев;
-дефекты смазки трущихся поверхностей.
Второй и третий дефекты, как правило, совпадают по виду влияния на вибрацию, а различия определяются лишь глубиной этого влияния. Именно поэтому такие два вида дефектов часто объединяют в одну группу.
Поскольку в состав редуктора входят, по крайней мере, две шестерни, первые три дефекта могут возникать на любой из шестерен и возбуждать вибрацию на разных частотах. Частоты возбуждаемой вибрации зависят от того, неподвижна ли ось вращения шестерни относительно корпуса редуктора или она перемещается в пространстве.
Выходная муфта
Ось
Входная муфта
fвр1 fвр2 fвр3
Рисунок 6.3.Схема двухступенчатого редуктора
51
На рисунке 6.3 приведена простейшая схема двухступенчатого редуктора, в котором оси шестерен неподвижны, и на каждой оси установлены либо одна, либо две шестерни. Частоты вращения осей определяются следующими выражениями:
fвр2= fвр1*(Z1/ Z21) ; fвр3= fвр2*(Z23/ Z3)= fвр1*(Z1Z23/ Z21Z3), |
(6.1) |
где fвр1, fвр2, fвр3 - частоты вращения первой, второй и третей осей редуктора соответственно.
Z1, Z3 число зубьев на шестернях первой и третей осей редуктора;
Z21 – число зубьев на шестернях второй оси редуктора, находящейся в зацеплении с шестерней первой оси;
Z23 – число зубьев на шестерне второй оси редуктора, находящейся в зацеплении с шестерней третей оси.
Для определения частот вынуждающих сил и вибрации шестерни, необходимо определить еще зубцовые частоты. В приведенном на рисунке редуктора их две, по числу ступеней:
fZ1= fвр1 Z1= fвр2 Z21; fZ2= fвр2* Z23= fвр3 Z3= fвр1* (Z1Z23/Z21), |
(6.2) |
fZ1 – зубцовая частота первой ступени редуктора; fZ2 - зубцовая частота второй ступени редуктора;
по аналогии со схемой, приведенной на рисунке, составляется схема для редуктора с любым числом ступеней.
Основной особенностью влияния дефектов шестерен и зацеплений на вибрацию является тот факт, что это влияние сказывается практически на всех узлах редуктора. Поскольку минимальные значения частоты вращения зубчатых колес и максимальные значения зубцовых частот могут различаться на несколько порядков, появляются проблемы связанные с ограниченным числом частотных полос анализатора спектра (400,800 или 1600), которых не хватает для диагностических измерений во всем диапазоне частот, составляющих вибрации, определяемых дефектами шестерен редуктора.
Возникает необходимость в некоторых точках измерять вибрацию в двух разных полосах частот и согласовывать результаты диагностики, полученные по данным измерений в каждой из них.
Особенностью функционирования любого зубчатого зацепления является действие на него постоянной нагрузки, передаваемой через редуктор, и динамической нагрузки при входе и выходе из зацепления каждого зуба шестерни. Эту динамическую нагрузку можно рассматривать как удар. Частота ударов равна зубцовой частоте, а амплитуда и форма каждого уровня может различаться. Это различие растет по мере износа зубьев, появления в них трещин и , тем более, при отсутствии каких либо частей зуба. Если, например, величина и форма ударов для всех, кроме одного зуба, одинаковы, то это эквивалентно появлению один раз за оборот шестерни дополнительного удара, чаще «отрицательного» и тогда, кроме ряда гармоник вибрации зубцовой частоты, появляется ряд гармоник вибрации на частотах, кратных частоте вращения шестерни. Итак, при появлении дефектов
52
изменяется форма либо всех, либо части ударных импульсов, возникающих при входе зубьев в зацепление. Одной из основных причин ударов является динамическая нагрузка на шестерню при входе зубьев в зацепление. Если только эта нагрузка сравнима по величине со статической нагрузкой, она влияет и на силы трения в подшипнике рассматриваемой шестерни. Следовательно, кроме изменений в спектре вибрации редуктора, при появлении дефектов шестерни возможны изменения и в спектре огибающей случайной вибрации подшипников этой шестерни. Рассмотрим влияние на вибрацию редуктора и ее огибающую каждый из указанных видов дефектов, которые возникают при монтаже или эксплуатации редуктора:
Бой вала (шестерни) – возникает в следствии неправильной посадки шестерни на вал или непараллельность шестерен, входящих в зацепление, из-за которой площадь контакта зубьев зависит от угла поворота шестерни с рассматриваемым дефектом. Следи основных причин появления этого дефекта при монтаже можно отметить несоответствие диаметров посадочного отверстия шестерни и диаметра вала, приводящие либо к смещению осей шестерни вала. Либо к перекосу шестерни. Кроме того, в процессе эксплуатации при появлении перегрузок редуктора может произойти деформация вала. Действие боя вала на вибрацию заключается в плавном изменении величины ударных импульсов при входе зубьев в зацепление с частотой вращения дефектной шестерни. В результате вибрация на зубцовой частоте приобретает амплитудную модуляцию, и в ее спектре у составляющей зубцовой частоты появляются боковые составляющие, отстоящие на частоту вращения шестерин. Боковые составляющие, отстоящие на двойную частоту вращения, оказываются значительно меньше.
Если имеет место сильная деформация вала, и при определенном угле поворота шестерни зубья, входя в зацепление, резко увеличивают радиальную нагрузку на оси обеих шестерен, тогда растут силы трения в подшипниках и в спектре огибающей высокочастотной вибрации двух шестерен появляются составляющие с частотой вращения дефектной шестерни.
Дефекты шестерни - под этими дефектами понимаются неоднородный износ зубьев, трещины и сколы на них, отсутствие отдельных зубьев. При неоднородном износе возникают зоны шестерни с повышенным износом. В результате, при попадании зубьев этой зоны в зацепление, удары при входе каждого зуба будут различны, но их величина резко возрастает или падает по сравнению с ударами при входе в зацепление зубьев без износа. Приблизительно такая же ситуация возникает и тогда, когда в зубе есть трещина или зуб отсутствует. Таким образом, зубцовая вибрация приобретает амплитудную модуляцию с периодом, определяемым частотой вращения дефектной шестерни, но уже не плавную, как при бое шестерни, а скачкообразную, и в спектре вибрации у зубцовых гармоник появляется большая группа боковых составляющих, отстоящих от центральной на kfвр.
При износе зубьев или трещине в одном из них с этим же периодом скачкообразно изменяется нагрузка на подшипники. Поэтому в спектре огибающей высокочастотной_ вибрации подшипников появится группа составляющих с частотами, кратными частоте вращения дефектной шестерни.
53
Дефекты зацепления имеют общий признак - смещение точек контакта зубьев относительно расчетной. Причиной этого является, например, сдвиг шестерен друг относительно друга вдоль осей вращения, в плоскости вращения шестерен или под углом. Наиболее часто эти виды дефекта появляются при сборке редуктора, но могут появиться и во время эксплуатации, чаще всего из-за износа подшипников, вследствие чего оси шестерен смещаются. В результате этого зона контакта отличается от расчетной, и динамические силы, действующие на зубья, растут. Как следствие, растет уровень зубцовых гармоник вибрации, но при этом не растут боковые составляющие с частотой вращения любой из шестерен. На спектре огибающей вибрации подшипников такой дефект может не проявиться.
Дефекты смазки - Последняя группа рассматриваемых дефектов приводит к нарушениям условий смазки зубьев в зоне зацепления. Такая группа дефектов по своему воздействию на вибрацию редуктора слабо отличается от предыдущей, а следовательно, сопровождается ростом зубцовых гармоник вибрации. Иногда эти две группы дефектов удается различить по соотношению амплитуд первых трех гармоник зубцовой вибрации. При дефектах смазки вторая и третья гармоники растут обычно значительно медленнее, чем первая, и, если отсутствуют резонансы на этих гармониках, они слабо выделяются на фоне других составляющих вибрации редуктора.
Бой шестерни приводит к плавному изменению нагрузки на другие шестерни и к плавно изменению площади контакта зубьев, т.е. к плавной модуляции зубцовых гармоник вибрации. Так, бой ведущей шестерни приводит к росту вибрации редуктора на частоте ее вращения и модуляции зубцовой гармоники, определяемой зацеплением зубьев сателлитов и короны, разностной частотой fвp1-fвp2. С частотой fвр1 может изменяться нагрузка на подшипники ведущей шестерни, и в спектре огибающей вибрации подшипников может расти составляющая с частотой вращения ведущей шестерни. Что касается нагрузки на сателлиты, то она меняется с разностной частотой fвp1-fвp2, поэтому возможна модуляция зубцовой вибрации разностной частотой.
Бой сателлита приводит к изменению нагрузки на зубья с частотой вращения сателлита и зубцовые гармоники вибрации могут быть модулированы этой частотой. Кроме того, с этой же частотой может изменяться нагрузка на подшипники как входной, так и выходной шестерен, и в спектре огибающей их вибрации появляется составляющая с частотой вращения сателлита.
Бой выходного вала определяется, в основном, различием, которое возникает в диаметрах сателлитов либо при их изготовлении, либо из-за разного износа. Обычно бой выходного вала приводит только к изменению нагрузки на его подшипники, в спектре огибающей вибрации которых появляется составляющая с частотой fвр2. Дефекты шестерни, а именно, износ или другие дефекты зубьев отличаются от боя только формой нагрузок, которая перестает быть плавной. В результате, кроме гармоник вибрации или ее огибающей с частотой вращения соответствующей шестерни, появляется большое число кратных ей гармоник. Соответственно зубцо- вые составляющие вибрации имеют не одну пару боковых составляющих, а несколько, с кратными частотами.
54
Дефекты зацепления, определяемые смещением шестерен в зацеплении с последующим изменением зоны контакта зубьев, приводят к росту зубцовых составляющих вибрации редуктора и их гармоник.
Дефекты смазки, а именно, низкое качество смазки в зоне зацепления, в отличие от смещения шестерен, прежде всего увеличивает уровень первой гармоники зубцо- вой вибрации. Более высокие гармоники растут, как правило, с меньшей скоростью, чем первая.
Последние два дефекта могут не приводить к появлению динамических нагрузок на подшипники, и в спектре огибающей случайной вибрации подшипников может не быть зубцовых гармоник.
Выполненный анализ влияния дефектов шестерён и зацеплений на вибрацию показывает, что обнаружить эти дефекты можно по росту уровней соответствующих составляющих спектра вибрации редуктора. Большинство из дефектов можно обнаружить и по появлению амплитудной модуляции случайной вибрации подшипников, а в планетарных редукторах и случайной вибрации корпуса (короны) редуктора. Следует отметить, что ограничиваться измерениями спектров низкочастотной и среднечастотной вибрации редукторов и их подшипников при обнаружении дефектов невозможно, так как в любой точке контроля на вибрацию оказывают влияние дефекты всех шестерён и подшипников редуктора, что затрудняет их идентификацию. В то же время на параметры модуляции случайной вибрации каждого подшипника оказывают влияние только его дефекты и дефекты двух-трех ближайших к этой точке шестерён.
6.4Диагностические признаки дефектов редукторов
Динамические силы, возникающие в редукторах при наличии дефектов, передаются на корпус, в основном, через подшипники шестерён. Поэтому подшипники являются теми узлами редуктора, вибрация которых изменяется при дефектах шестерен, валов, соединительных муфт и собственно подшипников. Таким образом, точки контроля вибрации редуктора рекомендуется выбирать на корпусе подшипниковых узлов по одной на каждом узле.
Весьма важным является выбор направления измерения вибрации. В одноступенчатых редукторах рекомендуется вибрацию измерять в радиальном к осям вращения шестерен направлении и в плоскости, проходящей через эти оси. Проблемы в выборе направления возникают в многоступенчатых редукторах, в которых оси шестерен могут не находиться в одной плоскости, и в угловых редукторах, в которых оси шестерен находятся под углом друг к другу. В этом случае рекомендуется минимизировать углы между направлениями измерений и передачи статической нагрузки.
В качестве примера на рисунке 6.4 показаны предпочтительные направления измерения вибрации в многоступенчатых редукторах.
55
Рисунок 6.4 Предпочтительные направления измерения вибрации
Следует отметить, что при диагностике редукторов по спектру огибающей вибрации их подшипников основные признаки дефектов определяются параметрами высокочастотной вибрации подшипника, а для их определения выбор направления измерения вибрации не очень важен. Гораздо более важным является выбор точки установки датчика вибрации, до которой высокочастотная вибрация подшипника должна доходить с минимальными потерями.
При диагностике редукторов по спектрам низкочастотной вибрации направления измерений следует выбирать перпендикулярно оси вращения и встречно к направлению нагрузки. Еще одна рекомендация по выбору точек измерения вибрации редуктора относится к выбору реперных точек, по которым осуществляется мониторинг его состояния. Поскольку при некоторых дефектах шестерен может возникать их вибрация в осевом направлении, но она не используется при глубокой диагностике узлов редуктора, рекомендуется хотя бы одну из реперных точек выбирать таким образом, чтобы направление измерения позволяло обнаружить рост уровней осевой вибрации любой из шестерен редуктора.
При выборе точек контроля вибрации особое внимание следует уделить анализу высокочастотной части спектра вибрации в каждой из точек, и нельзя допускать ошибок при выборе полосы частот, используемой для выделения огибающей случайной вибрации.
Для того чтобы не искажать результаты диагностики по спектру огибающей, полосу частот фильтра детектора огибающей рекомендуется выбирать в диапазоне выше пятой гармоники, максимальной из зубцовых частот редуктора. Но на столь высоких частотах случайная вибрация подшипника может быть настолько слабой, что окажется ниже собственных шумов измерительной аппаратуры. Поэтому необходимо выбирать точки измерения вибрации таким образом, чтобы сигнал в полосе фильтра не имел явных гармонических составляющих, был выше фона аппаратуры и в процентном отношении его уровень был не менее 1 % от уровня максимальной составляющей спектра вибрации редуктора.
56
6.5Выбор периодичности измерений, режимов работы редуктора
Скорость развития дефектов в значительной степени зависит от конструктивных особенностей редуктора, наличия в нем дефектов изготовления и сборки, условий эксплуатации, особенно от количества пусков и скачков нагрузки в межремонтный период. Но в большинстве случаев скорость развития дефектов подшипников редуктора выше скорости развития дефектов шестерен, поэтому периодичность измерений должна определяться состоянием и скоростью развития дефектов подшипников.
Рекомендуемым интервалом между измерениями может считаться интервал от одного до трёх месяцев. По аналогии с диагностикой подшипников при обнаружении дефектов шестерен и зацеплений, если они не превысили порог среднего, можно не изменять интервал между измерениями. При средних дефектах интервал между измерениями рекомендуется сократить в 2 раза, при сильных - ещё в 3 раза. Основной рекомендацией по выбору режима работы редуктора при диагностике является обеспечение одной и той же скорости вращения во время каждого из периодических измерений вибрации и одной и той же величины нагрузки. Значения частоты вращения во всех используемых для диагностики случаях должны укладываться в диапазон порядка + 10% от ее должна быть не хуже 1 %, в противном случае линии в спектрах вибрации или ее средней величины. При этом стабильность частоты вращения во время одного измерения огибающей "размываются" и достоверные результаты диагностики не могут быть получены. Величина нагрузки во всех случаях также должна выдерживаться с точностью не хуже + 20% от ее среднего значения.
Особо следует остановиться на рекомендациях по выбору нагрузки на редуктор во время диагностики. Лучше всего, если величина и направление нагрузки будут теми же, при которых происходит основной износ шестерен и подшипников, то есть номинальными. При других нагрузках могут изменяться направления действия нагрузки на подшипники и смещаться контактные поверхности зубьев, что может снизить достоверность диагноза и прогноза. Если же невозможно обеспечить номинальную нагрузку редуктора при диагностике, желательно, по крайней мере, сохранить направление действия нагрузки на зубья шестерен. В этом случае будет обеспечена минимальная вероятность "ложной тревоги" при сохранении минимальной вероятности пропуска таких опасных дефектов, как трещины и сколы на зубьях шестерен.
Все дефекты, автоматически обнаруживаемые при обработке данных измерений в программах, по глубине могут делиться на три группы: слабые (I), средние (М) и сильные (S). Если выбранный метод обработки сигнала вибрации не позволяет обнаружить слабые дефекты, как это имеет место, например, при анализе узкополосных спектров вибрации, группа этих дефектов не рассматривается.
При диагностике редукторов по узкополосному спектру вибрации задаются два пороговых значения для каждого из диагностических параметров, один из которых определяет появление сильного дефекта, а другой -среднего. Пороговые значения отсчитываются от среднего значения параметра (среднего уровня составляющей спектра вибрации), определенного по всем предыдущим измерениям (не менее трёх). Изданных предыдущих измерений автоматически исключаются ошибочные,
57
выпадающие за границы естественного разброса случайных величин (уровней составляющих, измеряемых в децибелах виброускорения). Величина рекомендуемого порога сильного дефекта составляет 20 дБ над средним уровнем соответствующей составляющей спектра. Рекомендуемое значение порога среднего дефекта в два раза меньше и составляет 10 дБ.
Эти пороговые значения при стабильном режиме работы минимизируют вероятность ошибочных решений, которая является суммой вероятностей пропуска дефекта и ложного срабатывания. При диагностике многорежимных машин оператор может установить более высокие пороги. Если машина непрерывно работает при относительно стабильных внешних условиях (температура, влажность и т.п.), а ее частота вращения и нагрузка не изменяются, значения порогов можно снизить. Это даст возможность обнаруживать слабые дефекты на ранней стадии их развития, но требует принятия индивидуальных решений о продолжении эксплуатации машины, если программой обнаружены сильные дефекты. Дело в том, что к множеству машин с сильными дефектами в этом случае программа относит и те, в которых глубина дефекта еще не дошла до аварийноопасных значений.
При диагностике редукторов по спектру огибающей вибрации задаётся три пороговых значения для каждого из видов дефектов, за исключением дефектов смазки подшипников для которых, как и в предыдущем случае, задаются пороги сильного и среднего дефектов. Пороги определяются в величинах (процентах) глубины модуляции для всех дефектов кроме дефекта смазки, для которого они определяются в приращениях уровня высокочастотной вибрации, измеряемой в децибелах виброускорения.
Простейшим алгоритмом задания порогов для составляющих спектра огибающей является использование рекомендуемых в качестве начальных значений порогов сильных дефектов, составляющих для дефектов смазки 20 дБ, а для остальных видов дефектов 20% (по глубине модуляции). Пороги средних дефектов определяются автоматически как среднее значение от суммы порогов сильного и слабого дефектов. Для дефектов смазки порог слабого дефекта отсутствует, и величина порога среднего дефекта составляет 10 дБ. Порог слабого дефекта по глубине модуляции всегда определяется автоматически и зависит от чувствительности анализирующей аппаратуры, используемой для выделения слабых гармонических составляющих на фоне случайных составляющих спектра огибающей.
В редукторах с подшипниками качения величины рекомендуемых значений порогов сильных дефектов определяются программой автоматически.
6.6Основные методы диагностики редуктора
Работу любой зубчатой пары в редукторе или мультипликаторе сопровождает целый ряд характерных вибраций, вызываемых трением и ударами при обкатывании зуба одной шестерни зубом другой шестерни. Анализ этих вибраций позволяет в работающем оборудовании достаточно успешно диагностировать целый ряд различных дефектов зубозацепления. Непременным условием корректной оценки текущего технического состояния зубчатых пар и успешной диагностики возможных дефектов редукторов и мультипликаторов является наличие спектроанализатора с
58
высоким частотным разрешением, не менее 1600 линий в спектре, и датчиков, позволяющих регистрировать как высокочастотные, так и низкочастотные вибрации.
Методы диагностики, применимые к зубчатым парам.
Временной вибросигнал вибрации на зубчатых парах обычно является по своей форме очень сложным, “ зашумленным” большим количеством колебаний разной частоты и амплитуды. По форме временного вибросигнала можно (но правда достаточно сложно) выявлять такие “ крупные” дефекты, как трещина в одном или нескольких зубцах, достаточно хорошо диагностируется отсутствие зуба. Все остальные, более “ мелкие” дефекты состояния зубчатых пар, по временному вибросигналу диагностируются трудно.
∙Спектр вибросигнала является наиболее простым и распространенным практическим диагностическим аппаратом, позволяющим определять все основные дефекты зубозацепления. Применение диагностики по спектрам вибросигналов требует обязательного знания внутренних конструктивных особенностей редукторов.
∙Кепстр вибросигнала применим на первых фазах диагностики и позволяет выявлять наиболее дефектные зубчатые пары в сложных редукторах, сравнивать их между собой по уровню износа по вероятности наличия дефекта. При использовании кепстрального анализа можно одновременно диагностировать несколько зубчатых пар при помощи информации, снимаемой с одного вибродатчика.
∙Спектр огибающей вибросигнала позволяет выявлять многие дефекты в редукторах. Диагностика по спектру огибающей достаточно сложна для физического толкования дефектов зубозацепления. Поэтому она обычно требует хорошей теоретической подготовки вибродиагноста или наличия в его техническом арсенале специализированной компьютерной экспертной системы, решающей эти проблемы.
∙Модальный анализ дает высокую эффективность при диагностике состояния зубчатых пар, но он является самым сложным с точки зрения интерпретации физических процессов и требует достаточно хорошей математической подготовки диагноста.
7.Физические основы ультразвуковой дефектоскопии
7.1Природа и получение ультразвуковых колебаний.
Упругие механические колебания, распространяющиеся в воздухе, воспринимают обычно как звуки. Это — акустические колебания. Если их частота более 20 000 Гц (20 кГц), т. е. выше порога слышимости для человеческого уха, то такие колебания называют ультразвуковыми (УЗК). В дефектоскопии наиболее часто используют диапазон частот 0,5—10 МГц 0 МГц=106 Гц).
Упругие колебания могут быть возбуждены в твердых, жидких и газообразных средах. При этом колебательное движение возбужденных частиц благодаря наличию
упругих сил между ними вызывает распространение |
упругой |
УЗ-волны, |
сопровождаемое переносом энергии. |
|
|
59
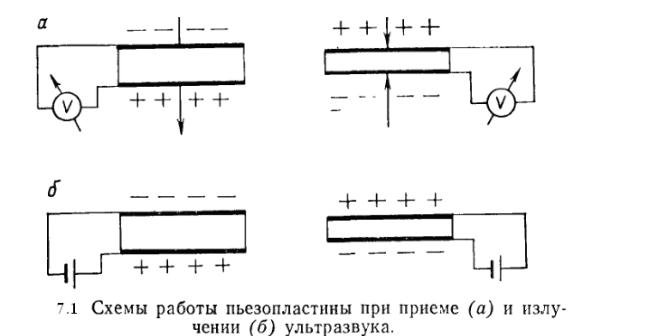
Для получения УЗ-колебаний применяют пьезоэлектрические, магнитострикционные, электромагнитно-акустические (ЭМА) и другие преобразователи. Наибольшее распространение получили пьезоэлектрические преобразователи, изготовленные из пьезокерамических материалов или из монокристалла кварца. На поверхности пьезопластины наносят тонкие слои серебра, служащие электродами. При подаче на пьезопластину электрического напряжения она изменяет свою толщину вследствие так называемого обратного пьезоэлектрического эффекта. Если напряжение знакопеременно, то пластина колеблется в такт этим изменениям, создавая в окружающей среде упругие колебания. При этом пластина работает как излучатель (6). И наоборот, если пьезоэлектрическая пластина воспринимает импульс давления (отраженная УЗ- волна), то на ее поверхности вследствие прямого пьезоэлектрического эффекта появляются электрические заряды, величина которых может быть измерена. В этом случае пъезопластина работает как приемник (а).
Процесс распространения ультразвука в пространстве является волновым. Граница, отделяющая колеблющиеся частицы среды от частиц, еще не начавших колебаться, называется фронтом волны. Упругие волны характеризуются скоростью распространения С, длиной волны λ и частотой колебании f .При этом под длиной волны понимается расстояние между ближайшими частицами, колеблющимися одинаковым образом (в одинаковой фазе). Число волн, проходящих через данную точку пространства в каждую секунду, определяет частоту УЗ-колебаний. Длина волны связана со скоростью ее распространения соотношением:
λ =C/f. |
(7.1) |
Следует отличать скорость волны С от скорости колебания частиц v. Скорость С
— физическая константа среды и зависит от ее свойств. Поэтому, применяя формулу в виде С= f λ или f=С/ λ, важно помнить, что нельзя изменить скорость волны С за
60