

1.3.3. Принцип управления по отклонению
С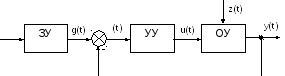 истему
можно построить и так, чтобы точность
выполнения обеспечилась и без измерения
возмущений, а коррективы в алгоритм
управления вносились бы по фактическому
значению координат в системе. Такой
принцип управления носит название
принцип управления по отклонению или
принцип обратной связи. Схема управления
по отклонению приведена на рис. 1.7. В
этой схеме коррективы в алгоритм
управления вводят по фактическому
значению координат системы. Так как
направление передачи сигнала в
дополнительной обратной связи обратно
направлению передачи основного
воздействия на объект, то эту дополнительную
цепь называют обратной связью.
истему
можно построить и так, чтобы точность
выполнения обеспечилась и без измерения
возмущений, а коррективы в алгоритм
управления вносились бы по фактическому
значению координат в системе. Такой
принцип управления носит название
принцип управления по отклонению или
принцип обратной связи. Схема управления
по отклонению приведена на рис. 1.7. В
этой схеме коррективы в алгоритм
управления вводят по фактическому
значению координат системы. Так как
направление передачи сигнала в
дополнительной обратной связи обратно
направлению передачи основного
воздействия на объект, то эту дополнительную
цепь называют обратной связью.
Рис. 1.7. Схема управления по отклонению
Такая
система является замкнутой. Для выработки
управляющего воздействия используется
величина ![]() ,
которую называют рассогласованием или
ошибкой. (Отклонение
,
которую называют рассогласованием или
ошибкой. (Отклонение ![]() отличается от нее только знаком).
отличается от нее только знаком).
При
![]() > 0 управляющее
воздействие
> 0 управляющее
воздействие ![]() должно увеличивать
управляемую величину
должно увеличивать
управляемую величину ![]() ,
а при
,
а при ![]() < 0 – уменьшать.
< 0 – уменьшать.
Надо
отметить следующее противоречие этого
принципа : прежде чем уменьшить отклонение,
мы вынуждены его допустить. Как далее
будет показано, в простейшей статической
системе всегда ![]() ≠ 0,
то есть
статическая ошибка неизбежна.
≠ 0,
то есть
статическая ошибка неизбежна.
Для
улучшения качества функционирования
системы необходимо вырабатывать
управляющее воздействие в функции не
только![]() ,
но также его производных и интегралов
по времени
,
но также его производных и интегралов
по времени
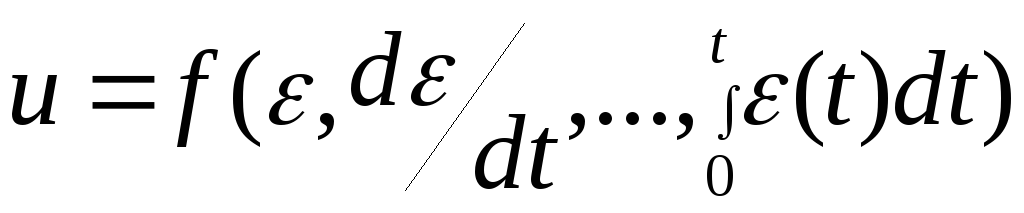 .
(1.3)
.
(1.3)
Еще раз отметим важную особенность системы регулирования по отклонению: если в ней применен регулятор, состоящий только из элементов, имеющих аналитические статические характеристики, то регулирование по отклонению уменьшает, но не устраняет статическую ошибку. Действительно, уравнение статики
![]() ;
;
![]() ,
(1.4)
,
(1.4)
где
![]() -коэффициенты
передачи объекта, регулятора и нагрузки
соответственно.
-коэффициенты
передачи объекта, регулятора и нагрузки
соответственно.
Из выражения (1.4) следует
![]() ;
;
![]()
и, следовательно,
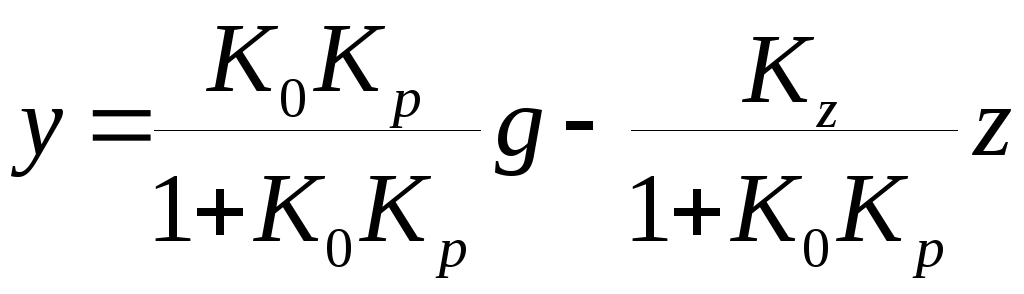 .
.
Из этого выражения видно, что значение выхода зависит от возмущения. Такие системы называются статическими. Если статическая ошибка нежелательна, то структуру системы изменяют таким образом, чтобы статическая ошибка равнялась нулю. Такие системы называют астатическими. Далее они будут рассмотрены детально.
Отметим, что существенным недостатком как статических, так и астатических систем с обратной связью является существенное ухудшение качества регулирования при наличии запаздывания в измерении регулируемой величины.
Приведем примеры АСР, построенных по принципу обратной связи.
В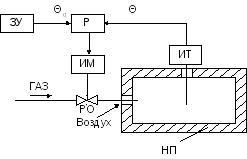 АСР температуры в печи (рис. 1.8)
регулируемая величина измеряется
термопарой (измерителем температуры)ИТ.
Информация о температуре
АСР температуры в печи (рис. 1.8)
регулируемая величина измеряется
термопарой (измерителем температуры)ИТ.
Информация о температуре ![]() поступает в регулятор Р,
где сравнивается с заданным значением
поступает в регулятор Р,
где сравнивается с заданным значением
![]() ,
поступающим из задающего устройства
ЗУ.
По отклонению
,
поступающим из задающего устройства
ЗУ.
По отклонению ![]() регулятор вырабатывает управляющее
воздействие, обеспечивающее с помощью
исполнительного механизма ИМ
перемещение регулирующего органа РО,
направленное на устранение отклонения.
Если температура становится выше
заданной, то расход топлива уменьшается,
если ниже заданной – увеличивается.
регулятор вырабатывает управляющее
воздействие, обеспечивающее с помощью
исполнительного механизма ИМ
перемещение регулирующего органа РО,
направленное на устранение отклонения.
Если температура становится выше
заданной, то расход топлива уменьшается,
если ниже заданной – увеличивается.
Рис. 1.8. АСР температуры в нагревательной печи
Пример замкнутой АСР в прокатном производстве приведен на рис.1.9.
Регулятор толщины листа Р получает информацию о значении толщины h от измерителя толщины (толщиномера) ТМ, сравнивает её с заданным значением h0, поступающим из задающего устройства ЗУ, и с помощью регулятора зазора РЗ изменяет последний в направлении уменьшения отклонения толщины.
Р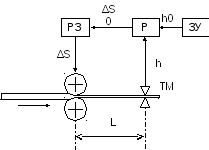 ис.
1.9.
АСР толщины
проката
ис.
1.9.
АСР толщины
проката
Очевидно, что для уменьшения запаздывания в системе ТМ должен располагаться как можно ближе к клети, что весьма проблематично по конструктивным соображениям. Наличие запаздывания ухудшает, как было сказано выше, динамические характеристики системы.
Управление по отклонению обладает очень важным свойством: результат работы системы слабо зависит от изменения характеристик объекта регулирования; система как бы нечувствительна к изменению свойств отдельных ее элементов в ограниченных пределах.
Для использования достоинств принципов управления по отклонению и по возмущению их реализуют одновременно. В таких комбинированных системах имеется два канала регулирования: канал регулирования по отклонению и канал регулирования по возмущению. В каждом канале имеется свой регулятор.