

1.3. Принципы автоматического управления
В основе построения АСУ лежат некоторые общие фундаментальные принципы управления, определяющие, каким образом осуществляется увязка алгоритмов функционирования и управления с фактическим функционированием системы или с причинами, вызывающими отклонение фактического поведения от заданного.
В настоящее время в технике используют три принципа управления: принцип разомкнутого управления, принцип управления по возмущению (принцип компенсации) и принцип управления по отклонению (принцип обратной связи). В некоторой литературе выделяют лишь два последних принципа, а системы, построенные по принципу управления по возмущению, относят к разомкнутым. Однако можно показать, что при использовании информации о возмущениях для выработки управляющего воздействия в алгоритме управления не явным образом используется информация и о выходной величине, значение которой в той или иной мере определяется возмущениями.
1.3.1. Принцип разомкнутого управления
В
АСУ, построенной по принципу разомкнутого
управления, алгоритм управления
вырабатывается только на основе заданного
алгоритма функционирования и не увязан
ни с выходом системы, ни с возмущениями.
Схема такого управления показана на
рис. 1.2. Задание ![]() алгоритма
функционирования вырабатывается
специальным задающим устройством ЗУ
(или задатчиком программы). В некоторых
случаях задание заранее закладывается
при конструировании управляющего
устройства УУ.
(Тогда ЗУ
в схеме будет отсутствовать). Схема
имеет вид разомкнутой цепочки, в которой
воздействие передается от входного
элемента к объекту управления ОУ.
Это и дало название принципу.
алгоритма
функционирования вырабатывается
специальным задающим устройством ЗУ
(или задатчиком программы). В некоторых
случаях задание заранее закладывается
при конструировании управляющего
устройства УУ.
(Тогда ЗУ
в схеме будет отсутствовать). Схема
имеет вид разомкнутой цепочки, в которой
воздействие передается от входного
элемента к объекту управления ОУ.
Это и дало название принципу.
В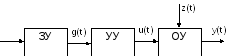 такой системе близость фактического
значения выхода
такой системе близость фактического
значения выхода![]() к требуемому
к требуемому ![]() обеспечивается только конструкцией и
подбором характеристик всех элементов.
обеспечивается только конструкцией и
подбором характеристик всех элементов.
Рис. 1.2. Схема разомкнутого управления
Этот принцип, имея очевидные недостатки, тем не менее, используется достаточно широко. Так, операции включения, отключения и переключения часто выполняются с помощью логических устройств, которые могут представлять собой элементы с управлением по разомкнутой цепи. К элементам разомкнутого типа можно отнести и многие счетно-решающие устройства. Общим для таких систем является то, что выполнение заданий не контролируется, возмущения не измеряются и не используются для выработки управляющих воздействий. Разомкнутая цепь далеко не всегда обеспечивает требуемую точность выполнения алгоритма функционирования, особенно при действии существенных возмущений.
1.3.2. Принцип управления по возмущению
Для повышения точности выполнения алгоритма функционирования можно измерить возмущения и по результатным измерениям внести коррективы в алгоритм управления с целью компенсации вызываемых возмущениями отклонений.
Схема
управления по возмущению показана на
рис. 1.3, где КУ
– корректирующее устройство. В
определенных случаях можно подобрать
такое корректирующее воздействие ![]() ,
чтобы в установившемся режиме отклонение
выходной величины отсутствовало
,
чтобы в установившемся режиме отклонение
выходной величины отсутствовало
![]() .
.
Например, если в статике
![]() ,
,
т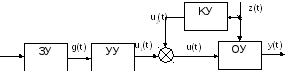 о,
выбрав
о,
выбрав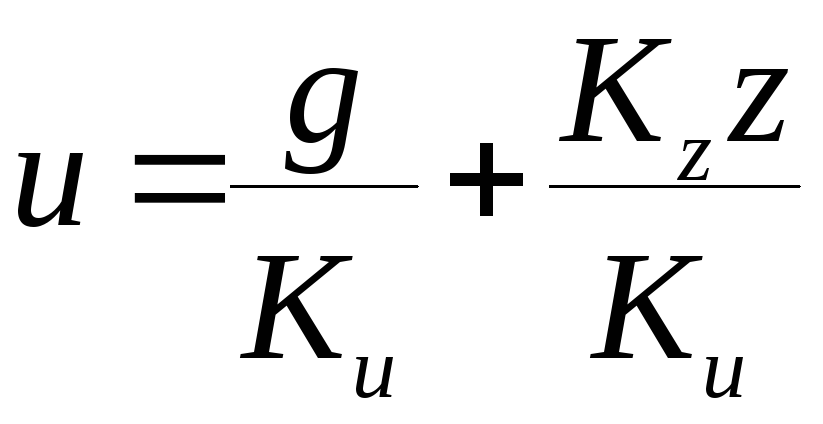 , получим
, получим ![]() .
.
Рис. 1.3. Схема управления по возмущению
Схему
управления по возмущению можно представить
и по-другому (рис. 1.4). В соответствии
с этой схемой возмущение ![]() ,
действующее на объект управления ОУ,
поступает одновременно и на модель
объекта М.
Получающаяся на выходе модели оценка
выхода
,
действующее на объект управления ОУ,
поступает одновременно и на модель
объекта М.
Получающаяся на выходе модели оценка
выхода ![]() сравнивается
с заданием
сравнивается
с заданием ![]() и их разность поступает на управляющее
устройство УУ,
вырабатывающее управляющее воздействие
и их разность поступает на управляющее
устройство УУ,
вырабатывающее управляющее воздействие
![]() .
.
Преимуществом
схемы управления по возмущению по
сравнению с рассматриваемой ниже схемой
управления по отклонению является то,
что во многих случаях она оказывается
более быстродействующей, так как
инерционность канала, по которому ![]() воздействует на выход
воздействует на выход ![]() ,
может быть более высокой, чем инерционность
канала управления
,
может быть более высокой, чем инерционность
канала управления ![]() .
Отметим, что модель и управляющее
устройство в системе управления не
обязательно выделяются в явном виде.
.
Отметим, что модель и управляющее
устройство в системе управления не
обязательно выделяются в явном виде.
Основным
недостатком рассматриваемого принципа
управления является использование
фиксированной модели. Часто ОУ
нестационарен, и связь возмущения с
выходом объекта изменяется во времени.
Это вызывает ошибку предсказания и
ухудшает качество управления. В таких
случаях применяют методы адаптивного
управления, которые рассматриваются в
соответствующем разделе дисциплины.
Следует отметить, что эффективность
управления по возмущению, прежде всего,
зависит от тесноты связи возмущения ![]() с выходом
с выходом ![]() .
Поэтому, прежде чем строить систему,
необходимо исследовать объект и
определить те возмущения, влияние
которых является определяющим.
.
Поэтому, прежде чем строить систему,
необходимо исследовать объект и
определить те возмущения, влияние
которых является определяющим.
Р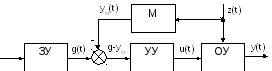 ис.
1.4. Схема управления по возмущению с
моделью объекта
ис.
1.4. Схема управления по возмущению с
моделью объекта
Рассмотрим примеры систем, построенных с использованием принципа управления по возмущению. Если в системе стабилизации температуры в нагревательной печи НП (рис. 1.5) основным возмущением являются колебания давления в газопроводе, что вызывает изменение расхода, а следовательно и температуры в печи при неизменном положении регулирующего органа РО, то можно, измерив давление с помощью датчика ИД (измеритель давления), выработать управляющее воздействие (регулятор Р) и с помощью исполнительного механизма ИМ скорректировать положение РО так, чтобы скомпенсировать влияние изменения давления.
Р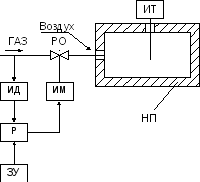 ис.
1.5. Система стабилизации температуры в
нагревательной печи
ис.
1.5. Система стабилизации температуры в
нагревательной печи
Следует отметить, что в такой системе взаимосвязь между отклонением давления и температуры, а также между температурой и положением РО должна быть заранее установлена. При правильно выбранной структуре и законе действия компенсатора возмущения давление перед горелкой не будет зависеть от давления в газопроводе и оно не будет влиять на расход топлива и температуру печи. Отметим, что информация о температуре, измеряемой датчиком ИТ (измеритель температуры), не используется системой, т.е. обратная связь по результатам работы системы отсутствует и поэтому система является разомкнутой.
Другим
примером является система стабилизации
толщины проката (рис. 1.6). Известно,
что при горячей прокатке основным
возмущением является колебания
температуры проката, измеряемое датчиком
температуры ИТ
(измеритель температуры, например,
пирометр). Компенсатор К
по значению ![]() рассчитывает величину коррекции зазора
между валками
рассчитывает величину коррекции зазора
между валками ![]() ,
которую отрабатывает регулятор зазора
РЗ.
Толщиномер ТМ,
установленный н
,
которую отрабатывает регулятор зазора
РЗ.
Толщиномер ТМ,
установленный н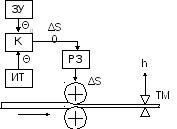 а
выходе клети, контролирует выходную
величину, но в работе не участвует.
а
выходе клети, контролирует выходную
величину, но в работе не участвует.
Рис. 1.6. Система стабилизации толщины проката