

Общая информация по всенаправленным роботам
Преимущество транспортных систем с всенаправленным приводом заключается в том, что они способны двигаться в любом направлении без необходимости вращения.
Основным элементом всенаправленного привода является так называемое разнонаправленное колесо или ролик, также известное как всенаправленное колесо. Эти колеса обычно имеют форму бочонка и крепятся на поворачивающейся поверхности основного колеса, их оси вращения расположены под прямым углом к оси вращения основного колеса (см. рисунок).
Разнонаправленные колеса могут активно приводиться в движение двигателем, а также пассивно катиться в сторону на встроенных в колесо роликах.
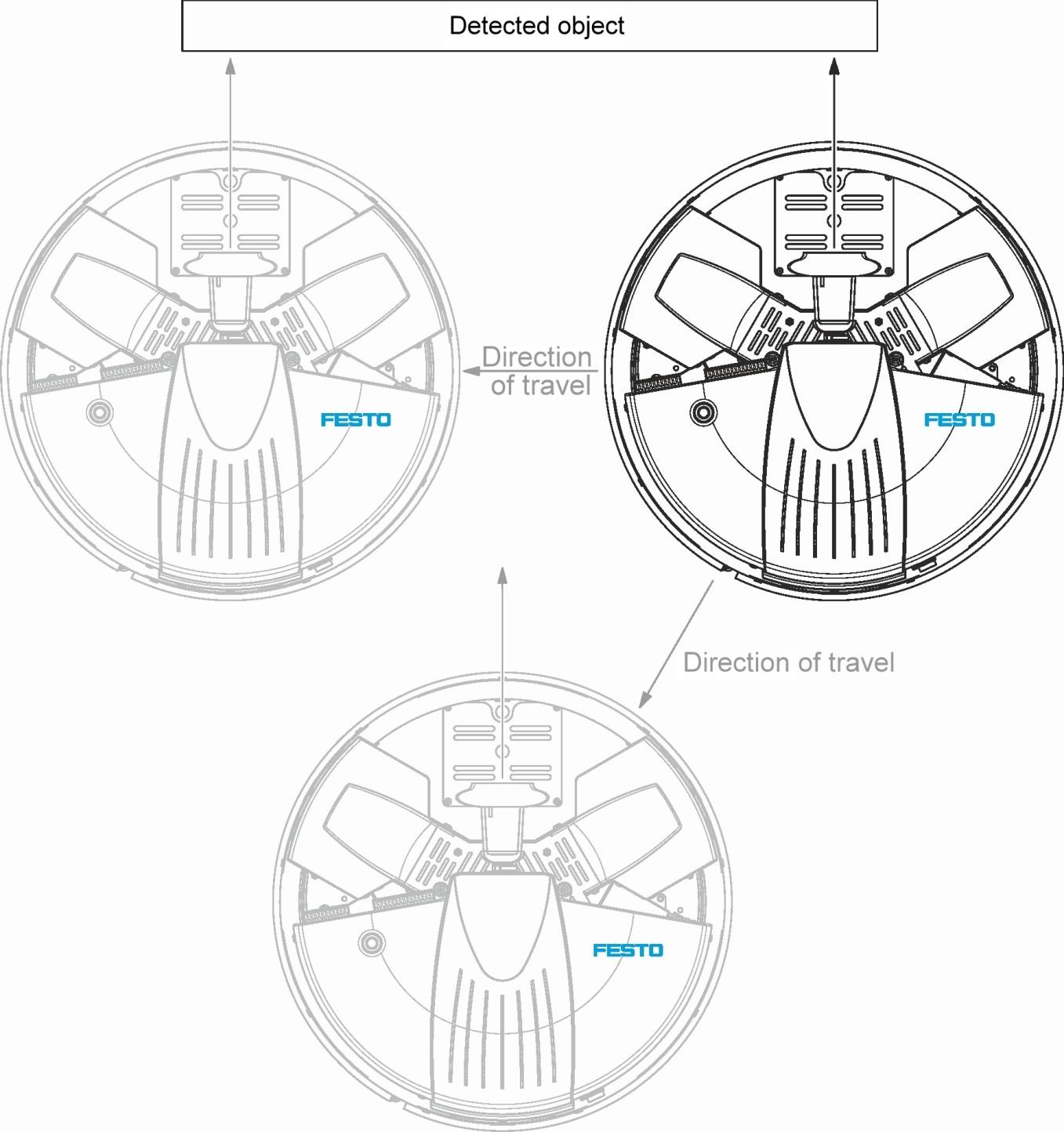
Роботу не надо отворачиваться от контролируемого объекта; он сохраняет свою линию визирования.
|
Detected object |
Обнаруженный объект |
|
Direction of travel |
Направление движения |
Движение с вращением (см. также проект 2, схему позиционирования)
Разнонаправленные колеса
Разнонаправленное колесо двигается одном направлении посредством приводной оси и дополнительно может катиться в любом направлении при помощи других колес. Поэтому благодаря взаимодействию с двумя другими блоками привода можно получать направление движения, которое отклоняется от направления привода.



Всенаправленный привод
Если в действие приводится основное колесо, то два дополнительных колеса блокируются и действуют как поверхность качения для главного колеса. Если привод останавливается и транспортная система двигается в другом направлении, например, при помощи второго всенаправленного колеса, расположенного под прямым углом, то дополнительные колеса вращаются и тем самым сводят фрикционное сопротивление колеса к минимуму. Такой тип конструкции допускает быстрое перемещение практически под любым углом к направлению движения главного колеса.
В случае использования симметричного привода колеса (разнонаправленные колеса или ролики) установлены под углом 120° друг к другу.

Колеса под углом 120°
На всенаправленном приводе колеса приводятся в движение так, чтобы все они вращались вместе.

Направление движения
Разнонаправленное колеса – преимущества и недостатки
Преимущество этой системы заключается в том, что благодаря разному регулированию скорости двигателей робот способен двигаться в любом направлении без необходимости поворота.
Дополнительные преимущества:
Транспортная система с всенаправленным приводом способна поворачиваться на месте
Радиус поворота этих транспортных систем равен нулю, поэтому нет необходимости в маневрировании
Вес всего робота распределен на три колеса, поэтому система лучше сбалансирована
Отсутствие необходимости в рулевом механизме
Простота и прочность механизма.
Один недостаток заключается в том, что в случае движения вперед происходит относительно высокое потребление энергии из-за большого количества поверхностей качения и большего сопротивления качению из-за увеличенного сопротивления трения.
Разные типы колес
Применительно к роботам с всенаправленным приводом используются различные типы колес. Выбор всегда зависит от поверхности, по которой будет перемещаться робот. Поперечные ролики из мягкого пластика или полиуретана особенно подходят для применения на твердых и гладких поверхностях, например, стекле или керамической плитке. Твердые поперечные ролики больше подходят для мягких поверхностей, например, ковров или картона. Еще одним отличительным признаком разнонаправленных колес является количество используемых поперечных роликов. Как указано на рисунке на стр. 26, на каждом из разнонаправленных колесимеется три поперечных ролика. Применение разнонаправленных роликов этого типа берет начало в сфере перемещения материалов, где широко используются три поперечных ролика.