

-
Внутрішнє орієнтування.
Виконується по чотирьох координатних мітках або центральних хрестиках знімків. Робота виконується з використанням стереоскопічної насадки для монітора.
Елементами
внутрішнього орієнтування аерознімка
називаються величини , які визначають
положення центра проекції відносно
фотознімка. До них відносяться фокусна
відстань
 камери АФА і координати головної точки
х0
і
у0.
камери АФА і координати головної точки
х0
і
у0.

-
Взаємне орієнтування.
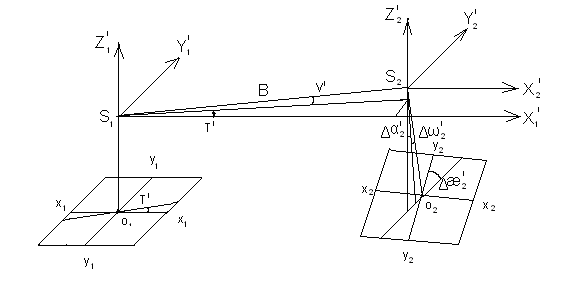
Лінійно-кутова система елементів взаємного орієнтування
За початок координат приймається лівий центр фотографування. Система координат S1Z’1Y’1X’1 паралельна системі S2Z’2Y’2X’2 (вісь X’1 не співпадає з віссю X’2).
τ’ – кут на лівому знімку між віссю х знімка та головною базисною площиною S1Z’1S2Z’2
ν’ – кут нахилу базису фотографування відносно лівого знімка.
Δα’ – взаємний повздовжній кут нахилу, утворений віссю S2Z’2 и проекцією головного променя на площину S2Z’2Х’2.
Δæ’ – взаємний розворот знімків, утворений у знімка і площиною S2Z’2Y’2.
Лінійно-кутова система елементів взаємного орієнтування
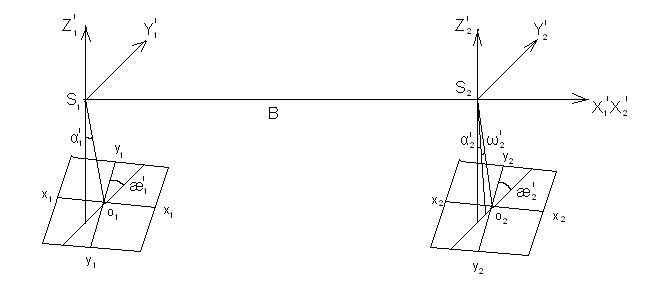
Базисна система елементів взаємного орієнтування
За початок координат приймають лівий центр фотографування S1. Система координат S1Z’1Y’1X’1 паралельна системі S2Z’2Y’2X’2, вісь X’1 суміщена з віссю X’2, вісь Z’1 лежить в головній базисній площині S1О1S2.
α’1 – повздовжній кут нахилу лівого знімка, утворений головним променем лівого знімка і віссю S1Z’1(перпендикуляром до базису)
æ’1 – кут розвороту лівого знімку в своїй площині, утворений віссю у1 і площиною S1Z’1Y’1.
α’2 – повздовжній кут нахилу правого знімка, утворений віссю S2Z’2(перпендикуляром до базису) та проекцією головного променя на площину S2Z’2Х’2.
ω’2 – Взаємний поперечний кут нахилу на правому знімку, утворений головним променем і його проекцією на площину S2Z’2Х’2.
æ’2 – кут розвороту правого знімку в своїй площині, утворений віссю у2 і площиною S2Z’2У’2.
Базисна система елементів взаємного орієнтування
-
Зовнішнє орієнтування.
Виконується по 6 опорних точках,максимум можна 12 точок,мінімум 3 точки
Елементи зовнішнього орієнтування – це величини , що визначають положення лівого і правого центрів проекцій S 1 та S2 і відповідних площин лівого Р1 та правого Р2 знімків у вибраній просторовій системі координат OXYZ. Цими елементами є: XS1 YS1 ZS1-просторові координати лівого центра проекції S1;
α1 , ω1,к1,- повздовжній поперечний кути нахилу лівого знімку Р1 та кут його розвороту ;
XS2 YS2ZS2 – просторові координати правого центра проекції S2 ;
α 2, ω2,к2 - повздовжній поперечний кути нахилу правого знімку Р2 та кут його розвороту .
Вектор В називають базисом фотографування
-
Створення цифрової моделі рельєфу (цмр).
Цифрова модель рельефу (ЦМР) - це впорядкований набір висот точок земної поверхні в цифровому вигляді плюс інтерполяційний алгоритм, який дозволяє вичислити висоту будь-якої точки об'єкта з достатньою точністю.
Точки ЦМР розташовують у вигляді сітки нерегулярної або регулярної.
Нерегулярна сітка найчастіше подаєся у вигляді сукупності трикутників, вершини яких поміщаються в характерних точках місцевості, і на цих пунктах проводяться вимірювання висот. У такій сітці збережена і передається топологія рельефу.
Ha практиці найчастіше використовують регулярну сітку (у вигляді квадратів, прямокутників або трикутників).
Регулярна сітка, як правило, є похідною від сукупності вимірів у характерних точках рельефу та отримується шляком інтерполяції.
Способи отримання вкідник даних для побудови ЦМР:
-
геодезичний (польовий);
-
картометричний;
-
фотограмметричний;
-
лазерне сканування.
Геодезичний спосіб полягає у визначенні висот точок будь-яким доступним прийомом, наприклад, з нівелювання пo квадратах, тахеометричного знімання тощо.
Фотограмметричний спосіб є одним з найкращих для створення ЦМР. Технологія залежить від того, який тип приладу використовується: аналоговий, аналітичний чи цифрова станція.
Досить цікавою є технологія створення ЦМР з викoристанням універсальник стереоприладів типу стереопроектора або стереoграфа. Ha приладі виконують геодезичне орієнтування стереопари. Після цього оператор встановлює голку координатографа над вершиною квадрата на планшеті, a потім вимірювальну марку опускає на поверхню стереомоделі. Отриману висоту точки моделі фіксують вручну. Обійшовши в такий спосіб всі вершини, оператор отримував ЦМР у вигляді регулярної сітки квадратів.
Аналітичний стереоприлад (типу стереоанаграфа) дозволяє отримувати висоти точок для т.зв. первинної сітки, кожна точка якої береться через певний інтервал, який задає оператор вздовж осей х-х та у-у приладу. За аналогією з попереднім способом, оператор візує на поверхню об’єкта стереоскопічною маркою, a отримана відмітка фіксується автоматично. Ha наступному етапі використовується інтерполяційний алгоритм, який з первинної сітки будує регулярну ЦМР, як правило, у вигляді сітки квадратів.
Лазерне сканування базується на використанні комплексу апаратури, який включає:
-
сканер лазерний (інфрачервоний);
-
бортова станція GPS;
-
наземна станція GPS;
-
інерціальна навігаційна система;
-
відеосистема;
-
блок реєстрації даних.
Ідея способу полягає в тому, що на борту літака встановлюється лазер, який висилає імпульс до точки об’єкта та приймає відбитий сигнал. Фактично вимірюється віддаль від лазера до точки місцевості. Лазерний промінь завдяки дзеркалу відкиляється від свого початкового положення, так що ми дістаємо ряд просканованих точок місцевості. За рахунок переміщення літака отримують виміри відстаней для сукупності рядів точок, яка репрезентуватиме ЦМР. Синхронно з лазером функціонує бортова GPS, яка фіксує місцезнаходження літака, та інерціальна система, яка фіксує кутову орієнтацію лазера.
Картометричний спосіб базується нa використанні існуючих карт із відображенням рельефу і полягає у цифруванні горизонталей вручну, напівавтоматично або в автоматичному режимі.