

Контрольная работа по ТАУ
.docМинистерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего профессионального образования
«Северо-Кавказский федеральный университет»
Невинномысский технологический институт (филиал)
«МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЛИНЕЙНЫХ ЗВЕНЬЕВ И СИСТЕМ»
Методические указания к выполнению контрольной работы
по дисциплине «Теория автоматического управления»
для студентов специальности 140604 (180400) «Электропривод и автоматика промышленных установок и технологических комплексов»
Невинномысск 2013
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЛИНЕЙНЫХ ЗВЕНЬЕВ И СИСТЕМ
Теоретические основы.
ОПЕРАТОРНАЯ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
Каждое реальное звено рассматривается как устройство, в котором осуществляется преобразование входного воздействия в выходную реакцию, или просто преобразование вход-выход. Взаимодействие между звеньями задается описанием связей между их входами и выходами, определяющих структуру системы. Основное предположение: для описания преобразования вход-выход линейного, стационарного звена используется дифференциальное уравнение с постоянными коэффициентами:

где (t) – выходная реакция (выход), u(t) – входное воздействие (вход),
ai, i=1,...,n и bi, i=1,…,m – постоянные величины (параметры звена), n и m – целые положительные числа.
Введем оператор
дифференцирования
![]() .
Умножение любой функции времени на D
эквивалентно её дифференцированию по
времени
.
Умножение любой функции времени на D
эквивалентно её дифференцированию по
времени

для любого целого
 .
.
Используя операторные обозначения уравнение (2.1) запишется в виде:
![]()
или
![]() ,
,
где введены многочлены от оператора дифференцирования
![]()
Найдем выход:

H(D) называется операторной передаточной функцией звена:
 .
.
Пример 1. Найти операторную передаточную функцию звена, если оно описывается дифференциальным уравнением
![]()
Используя оператор дифференцирования запишем
![]() ,
,
тогда

и
 .
.
Пример 2. Найти комплексную передаточную функцию звена, если оно описывается дифференциальным уравнением
 .
.
Применим к уравнению преобразование Лапласа:
 .
.
Используем свойства преобразования Лапласа
![]() .
.
Тогда

и
 .
.
СТРУКТУРНЫЕ СХЕМЫ И ПРАВИЛА ИХ ПРЕОБРАЗОВАНИЯ
Структурной схемой в ТАУ называют графическое изображение математической модели автоматической системы управления в виде соединения звеньев. Структурная схема состоит из звеньев, сумматоров и узлов.

Звено изображают прямоугольником, входное воздействие – стрелкой входящей в звено, выходное - стрелкой, направленной от него (Рис. 2.1).
Внутри звена ставят либо номер звена, либо его передаточную функцию.
Суммирующее и сравнивающее звено изображают в виде круга, причем при отрицательной связи около стрелки изображающей вычитаемое ставят знак минус (Рис. 2.2). Если одно и тоже воздействие прилагается к разным звеньям, то стрелка может разветвляться (Рис. 2.3).
Перенос сумматора.
Легко показать, что при переносе сумматора по ходу сигнала необходимо добавить звено с передаточной функцией, равной передаточной функции звена, через которое переносится сумматор (рис. 2.8).

Если сумматор переносится против хода сигнала, то необходимо добавить звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится сумматор (рис. 2.9).

Перенос узла.
При переносе узла также необходимо добавлять звено. Если узел переносится по ходу сигнала, то добавляется звено с передаточной функцией,
равной обратной передаточной функции звена, через которое переносится узел (рис. 2.10). Если узел переносится против хода сигнала, то добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится узел (рис.2.11).


Пример 3. Определить комплексную передаточную функцию системы изображенной на рис. 2.12, если передаточные функции звеньев соответственно равны:
![]()

Для определения передаточной функции всей системы произведем преобразование структурной схемы. Сначала перенесем первый сумматор по ходу сигнала:

Звенья 2 и 3, а также 3 и 5 соединены последовательно. Их можно заменить звеньями 6 и 7 с передаточными функциями Н6=Н2Н3 и Н7=Н3Н5 соответственно. Кроме того, переставим сумматоры.
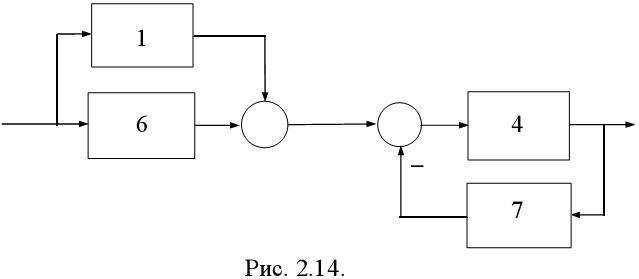
Звенья 1 и 6 соединены параллельно, а звенья 4 и 7 образуют отрицательную обратную связь. Заменим их звеньями 8 и 9 с передаточными функциями
![]()
и

соответственно:

Звенья 8 и 9 соединены последовательно и передаточная функция всей системы будет
![]() :
:

 ,
,
или
 .
.
В это выражение подставим значения передаточных функций всех звеньев, полученные выше, и окончательно получим:

Критерии качества переходных процессов
О качестве процесса регулирования в системе судят по следующим основным ее характеристикам:
-
по времени переходного процесса;
-
по величине наибольшего отклонения в переходном процессе;
-
по виду кривой переходного процесса;
-
по величине ошибки в установившемся режиме.
Для того чтобы пояснить эти основные понятия, рассмотрим графическое представление кривой переходного процесса в системе (рис.6).
Основные показатели качества процесса регулирования линейных систем следующие:
1. Время переходного процесса tп определяется как интервал времени от начала переходного процесса до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины. Обычно в качестве последней берут 2-5% максимального отклонения в переходный период.
2. Статическая ошибка регулирования – отклонение регулируемой величины от заданного значения по окончании переходного процесса.
3. Максимальное отклонение: max x(t) – отклонение, вызванное возмущением, определяется величиной А1.
4. Перерегулирование – максимальное отклонение, вычисленное относительно нового установившегося значения Хуст, пропорционального или равного заданному воздействию Хзд :
![]()
В большинстве случаев требуется, чтобы перерегулирование не превышало 10-30%.
5. Колебательность переходного процесса – оценивается отношением соседних максимумов А2/A1 и выражается в %. Переходный процесс обычно должен иметь 1-2 колебания, но допускается до 3-4 колебаний.
6. Степень затухания – отношение разности двух соседних положительных максимумов переходного процесса к первому из соседних максимумов:
![]()
где А1 и А3 – амплитудные значения ординат процесса регулирования.


Рис. Переходные характеристики АСР при отработке возмущения (а) и скачкообразном изменении задания (б)
Задание.
1) Найти операторные передаточные функции всех звеньев системы представленной структурной схемой.
2) Определить комплексную передаточную функцию системы.
3) Найти реакцию системы на единичное ступенчатое воздействие.
4) Определить показатели качества переходного процесса при воздействии ступенчатой функцией.








Литература
1. Теория автоматического управления. Ч.1, Ч.2. Под ред. А.А. Воронова А.
А. Учеб. пособие для вузов. М., «Высш. школа», 1977г.
2. Первозванский А.А. Курс теории автоматического управления: Учеб. по-
собие. – М. Наука. 1986г.