

lek_mehanika
.pdfЛекция 1 (часть 1) Тема: Механика Раздел 1
Кинематика поступательного движения материальной точки.
Вопросы.
Механическое движение. Поступательное движение. Материальная точка. Тело отсчета. Система отсчета. Траектория, путь, радиус-вектор, перемещение.
Скорость. Средняя скорость. Мгновенная скорость. Выражение радиус-вектора, координат и пути через скорость.
Ускорение. Среднее ускорение. Мгновенное ускорение. Тангенциальное, нормальное и полное ускорения. Выражение скорости через ускорение.
Равномерное прямолинейное движение. Скорость, путь и координата при равномерном прямолинейном движении. Равнопеременное (равноускоренное) прямолинейное движение. Ускорение, скорость, путь и координата при равнопеременном
прямолинейном движении.
При поступательном движении все точки тела движутся одинаково, и любой отрезок, проведенный внутри тела, остается параллельным первоначальному направлению.
Основным понятием механики и кинематики является материальная точка. Материальная точка это тело, размерами которого в условиях данной задачи можно пренебречь.
Тело отсчета это тело, относительно которого определяется положение в пространстве других тел. Система отсчета это тело отсчета, жестко связанная с ним система координат и прибор для измерения времени (в системе СИ время измеряется в секундах).
Траектория это линия, вдоль которой двигается тело (материальная точка). Путь это длина траектории (в системе СИ путь измеряется в метрах). Радиус-вектор это вектор, соединяющий начало координат (отсчета) и
точку, где находится тело.
Введем единичные вектора (орты), задающие направления координатных осей.
rr = xi + yj + zk
Перемещение это вектор, соединяющий начальное и конечное положение тела.
rr = xi + yj + zk
Вектора это направленные отрезки, которые складываются по правилу параллелограмма или треугольника.
Как правило, путь больше или равен перемещению. r ≤ S
Знак равенства возможен при прямолинейном движении и при движении за бесконечно малый промежуток времени.
Скорость это вектор, равный перемещению тела за единицу времени. Скорость бывает средняя и мгновенная.
Средняя скорость это скорость, определяемая за конечный промежуток времени.
r
υcp =
υ = lim
t→0
r
t
rr = drr = rr& t dt
В системе СИ: |
[υ]= |
м |
|
. Вектор скорости всегда направлен по касательной к |
|
||||
траектории. |
c |
|
|
|
|
|
|
|
|

r |
|
|
dr |
|
|
|
|
|
|
d |
|
|
|
r |
r |
|
r |
|
|
dx |
r |
|
dy |
r |
r |
|||||||||
υ = |
= |
|
|
(xi + yj |
+ zk)= |
i |
+ |
j + |
dz |
k |
||||||||||||||||||||||||
dt |
|
|
dt |
|
|
dt |
dt |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
||||||||||||
υ |
x |
= |
dx |
|
|
|
υ |
y |
= |
dy |
|
υ |
z |
= |
dz |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Здесь υx |
, υy , υz |
- проекции вектора υ на соответствующие оси. |
||||||||||||||||||||||||||||||||
r |
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
υ = υx i |
|
+ υy |
j + υz k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Скалярное произведение. |
|
|
|
|
|
|
||||||||||||||||||||||||||||
a = ax ri +ay j +azkr |
b = bx i + by j + bzk |
|
|
|||||||||||||||||||||||||||||||
(ar br)= |
|
ar |
|
|
|
br |
|
Cosα |
|
|
b = br = b2x + b2y + bz2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
a = ar = a 2x + a 2y + a z2 |
|
|
||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||
r |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(a |
b) = a x bx + a y by + a z bz |
|
|
|
|
|
|
|||||||||||||||||||||||||||
v |
= |
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
υ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
r |
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
dr |
= υdt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
r |
|
r |
|
|
t |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
∫dr = |
∫ |
υdt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
r0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r |
|
|
|
|
|
t |
|
|
r |
|
|
|
|
|
|
|
t |
|
|
|
t |
t |
||||||||||
r |
= r0 + |
∫ |
|
|
υdt x = x0 + ∫υx dt y = y0 + ∫υy dt z = z0 + ∫υz dt |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
0 |
|
||
υ = |
ds |
≈ |
dr |
|
( t → 0 r ≈ s) |
|
|
|
|
|
|
|||||||||||||||||||||||
dt |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
s = ∫t |
υdt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение это вектор, равный изменению вектора скорости за единицу времени. Ускорение бывает среднее и мгновенное. Среднее ускорение это ускорение, определяемое за конечный промежуток времени. Мгновенное ускорение это ускорение, определяемое за
бесконечно малый промежуток времени. В системе СИ: [a]= м .
c
r |
|
|
|
|
|
υ |
= |
υ− υ0 |
|
|
|
|
|
|
|
|
|
|
|
||||
a cp = |
t |
|
rt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
r |
|
r& |
|
|
|
|
|
|
|
|
|
|
|
||||
a = lim |
|
|
υ |
= |
dυ |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
t |
dt |
= υ |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
t→0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
r |
|
|
d |
(υx i |
+ υy j + υz k)= dυx i + dυy j + dυz k |
||||||||||||||
ar = dυ = |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
r |
|
r |
r |
|
|
|
|
r |
|
|
r |
|
r |
|
|
dt |
|
|
dt |
|
|
dυy |
|
|
|
|
|
dt |
|
dt |
dt |
||||||
a x |
= |
|
dυ |
x |
|
a y = |
a z = |
dυ |
z |
|
|
|
|
|
|
|
|||||||
|
dt |
|
dt |
dt |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Здесь a x ,a y ,a z - проекции вектора a |
на соответствующие координатные оси. |
||||||||||||||||||||||
ar = a x i + a y j + a z k |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Тангенциальное ускорение это проекция вектора ускорения на вектор скорости. Тангенциальное ускорение описывает изменение скорости по модулю.
a τ = ddtυ
Нормальное ускорение это проекция вектора ускорения на ось, перпендикулярную вектору скорости. Нормальное ускорение описывает изменение скорости по направлению.
a н = υ2 , где R – радиус кривизны траектории. R
a =  a н2 + a 2τ
a н2 + a 2τ
Малый отрезок кривой можно представить как дугу окружности.
ar = |
dυ |
|
|
|
|
|
|
|
||
dt |
|
|
|
|
|
|
|
|||
r |
|
|
|
|
|
|
|
|
||
|
|
r |
|
|
|
|
|
|
|
|
dυ = adt |
|
|
|
|
|
|||||
υ |
r |
t |
r |
|
|
|
|
|||
∫dυ = |
∫adt |
|
|
|
||||||
υ0 |
|
|
|
0 |
|
|
|
|
|
|
r |
|
r |
|
|
t |
r |
t |
t |
t |
|
υ = υ0 |
+ ∫adt |
υx = υ0x + ∫a x dt |
υy = υ0y + ∫a y dt |
υz = υ0z + ∫a z dt |
||||||
|
|
|
|
|
|
0 |
|
0 |
0 |
0 |
a τ |
= |
dυ |
|
|
|
|
|
|
||
dt |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
υ = ∫t a τdt
0
Примеры:
1. Равномерное прямолинейное движение (υ = const) .
Выберем ось x вдоль направления движения. Тогда y и z не нужны (y=0, z=0). a = 0
υ = υx = const
x = x 0 + ∫t |
υx dt = x 0 + υx ∫t dt = x0 + υx t |
|
|
|
|
|
|
||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
s = x − x0 |
= υx t |
|
|
|
|
|
|
|
|
|
|
|
|||||||
υx = |
s |
= |
|
x − x0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
t |
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2. Равноускоренное прямолинейное движение (a = a x |
= const) . |
|
|
||||||||||||||||
Выберем ось x вдоль направления движения (y=0, z=0). |
|
|
|
||||||||||||||||
υx = υ0x + ∫t a x dt = υ0x + a x ∫t dt = υ0x + a x t |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
a x = |
υx − υ0x |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = x 0 |
+ ∫t |
υx dx = x0 |
+ ∫t |
(υ0x + a x t)dt = x0 |
+ υ0x ∫t |
dt + a x ∫t |
tdt = x0 |
+ υ0x t + |
a x t 2 |
||||||||||
|
|||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
0 |
|
0 |
|
0 |
|
2 |
|||
s = x − x0 |
= υ0x t + |
a |
x |
t 2 |
|
|
|
|
|
|
|
||||||||
|
2 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3. x = A + Bt +Ct 2 + Dt3
x0 = A
υx = x& = B + 2Ct +3Dt 2 a x = υ&x = 2C + 6Dt
Раздел 2 Кинематика вращательного движения.
Вопросы:
Вращательное движение. Период и частота вращения. Угол поворота, угловая скорость, угловое ускорение. Выражение перемещения, скорости, ускорения через угол, угловую скорость, угловое ускорение.
Равномерное движение по окружности. Равноускоренное движение по окружности.
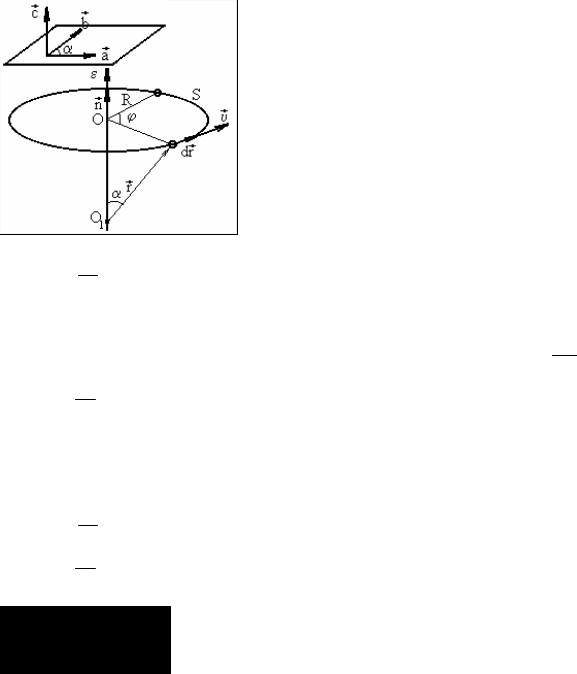
При вращательном движении вокруг неподвижной оси все точки тела движутся по окружностям, центры которых лежат на оси.
Пусть ϕ это угол поворота по окружности за время t. Угол вектором не является, но угол поворота dϕ за бесконечно малый промежуток времени dt можно рассматривать как вектор, направленный вдоль оси вращения. Бесконечно малые углы с точностью до бесконечно малой величины можно складывать как вектора. Направление вращения и направление dϕ
связаны правилом буравчика.
Угловая скорость это вектор, направленный вдоль оси вращения и равный по модулю углу
поворота |
за единицу времени. В системе СИ: |
|
рад |
||
[ω]= |
|
. |
|
||
c |
|
|
ωr = ddtϕ
Направление вращения и ω связаны правилом буравчика.
Угловое ускорение это вектор, направленный вдоль оси вращения и равный по
модулю изменению угловой скорости за единицу времени. В системе СИ: [ε]= рад .
c2
εr = ddtω
r r
Если ε ↑↑ ω - движение ускоренное.
r r
Если ε ↑↓ ω - движение замедленное.
n - единичный вектор, задающий направление оси вращения. dϕ = dϕ n
ωr = ddtϕ nr
εr = ddtω nr
Векторное произведение
cr = [ar×b]
c перпендикулярен плоскости, в которой лежат a и b . ar, b, cr образуют правую тройку векторов. cr ar, cr b .
c = |
|
|
|
r |
|
|
r |
|
Sinα |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
a |
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
r |
|
|
|
|
|
r |
|
|
|
|
|
|
r |
r r |
r |
|
r |
|
r |
r |
r |
r |
r |
|||||||||||
a = a x i |
+ a y j + a z k b = bx i |
+ by |
j + bz k c = cx i |
+ cy j + cz k |
||||||||||||||||||||||||||||||
cr = |
|
|
ri |
|
|
|
rj |
|
kr |
|
= (a y bz −a z by )ri + (a z bx −a x bz )rj + (a x by −a y bx )kr = cx ri + cy rj + cz kr |
|||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
a x |
|
|
a y |
|
a z |
|
||||||||||||||||||||||||||
|
|
|
|
|
bx |
|
|
by |
|
bz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
r |
|
|
|
|
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dr |
= [dϕ× r |
] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
dr = dϕ rSinα = dϕ R |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
r |
|
|
|
|
|
r |
|
|
|
|
|
r r |
|
|
|
|
r |
r |
|
r r |
|
|
|
|
|
|
|
|||||||
|
|
|
|
dr |
|
|
|
d[dϕ× r] |
dϕ |
|
|
|
|
|
|
|
|
|||||||||||||||||
υ = |
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
= |
|
|
× r |
|
= [ω× r] |
|
|
|
|
|
|
|
|||||
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
υ = ωrSinα = ωR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
r |
|
|
|
d |
|
|
|
|
|
|
|
|
r |
r |
|
r |
|
r |
|
|
|
|
|
|
|
||||
r |
|
|
dυ |
|
|
|
|
r r |
|
|
dω |
|
|
dr |
r r |
|
r r r |
|
r |
|||||||||||||||
a = |
|
|
|
|
|
|
|
= |
|
|
|
[ω× r |
]= |
|
× r |
|
+ ω× |
|
|
= [ε× r |
]+ |
[ω×υ]= a |
τ + a n |
|||||||||||
|
|
|
dt |
|
dt |
|
|
dt |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
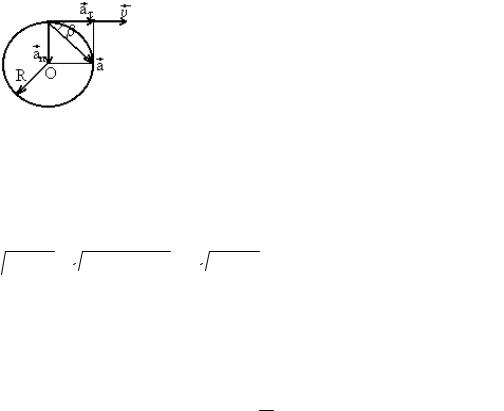
a τ |
= εrSinα = εR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
a n |
= ωυSin90° = ωυ = ω2 R = |
υ2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
R |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a = a τ +a n
a =  a 2τ + a 2n =
a 2τ + a 2n =  ε2 R 2 + ω4 R 2 = R
ε2 R 2 + ω4 R 2 = R  ε2 + ω4
ε2 + ω4
Примеры:
1.ϕ = A + Bt + Ct 2 + Dt3
ω= ϕ& = B + 2Ct +3Dt 2
ε = ω& = 2C + 6Dt
2. s = A + Bt + Ct 2 + Dt3
Если s = f (t) - монотонно возрастает: ϕ = Rs .
3. Равномерное вращение по окружности (R=const).
ε = 0, ω = const |
|||||
ω = |
dϕ |
|
|
|
|
|
|
|
|||
|
dt |
|
|
|
|
dϕ = ωdt |
|
||||
ϕ |
|
|
|
|
|
∫dϕ = ∫t |
ωdt |
|
|||
0 |
|
0 |
|
|
|
ϕ = ωt |
|
|
ω = |
ϕ |
|
|
|
|
|
|
t |
4. Равноускоренное вращение по окружности (ε = const, ω0 = 0) .

ε = |
d ω |
|
|
|
||
|
dt |
|
|
|||
|
|
|
|
|||
d ω = εdt |
|
|
||||
∫ω d ω = ∫t |
εdt |
|
||||
0 |
0 |
|
|
|||
ω = εt |
ε = |
ω |
||||
|
|
d ϕ |
|
|
t |
|
ω = |
|
|
|
|||
|
dt |
|
|
|||
|
|
|
|
|||
d ϕ = ωdt |
|
|||||
ϕ |
|
|
t |
|
t |
|
∫d ϕ = ∫ |
ωdt |
= ∫εtdt |
||||
0 |
0 |
|
0 |
|||
ϕ = ε2t 2
5. Равноускоренное вращение по окружности (ε = const, ω0 ≠ 0) . dω = εdt
ωt
∫dω = ∫εdt
ω0 0
ω= ω0 +εt
ω= ddtϕ
dϕ = ωdt
ϕ t t
∫dϕ = ∫ωdt = ∫(ω0 + εt)dt
0 0 0
ϕ = ω0 t + εt 2
2
Раздел 3 Динамика частиц. Законы Ньютона.
Закон сохранения импульса.
Вопросы.
Первый закон Ньютона. Инерция. Инерциальные системы отсчета. Принцип относительности Галилея. Неинерциальные системы отсчета.
Взаимодействие. Инертность. Масса. Сила. Сложение сил. Равнодействующая сила. Второй закон Ньютона. Третий закон Ньютона.
Границы применимости законов Ньютона.
Импульс тела. Замкнутая система. Закон сохранения импульса. Центр масс. Движение центра масс.
Законы Ньютона – обобщение экспериментальных данных.
Первый закон Ньютона (закон инерции).
Существуют такие системы отсчета (инерциальные), относительно которых тело сохраняет состояние покоя или равномерно прямолинейно движется, если на него не действуют другие тела или их действие взаимно скомпенсировано.
Инерциальные системы отсчета (ИСО) это такие системы отсчета, в которых выполняется первый закон Ньютона. В рамках достигнутой к настоящему времени точности измерений, системы отсчета, связанные с Солнцем и неподвижными относительно Солнца звездами, можно считать ИСО. Системы отсчета, связанные с Землей, в ряде задач можно считать ИСО приблизительно. Любая система отсчета, которая двигается равномерно и прямолинейно относительно ИСО, также является ИСО.
Принцип относительности Галилея.
Никакими механическими опытами нельзя определить движется ИСО или покоится. Все ИСО равноправны.
В неинерциальных системах отсчета (НИСО) тело может иметь ускорение без видимых на то причин, то есть без взаимодействия.
Инерция это свойство тела сохранять состояние покоя или равномерного прямолинейного движения при отсутствии внешних воздействий или их взаимной компенсации.
Сила. Масса. Второй закон Ньютона.
Инертность это свойство тела изменять свою скорость при взаимодействии не мгновенно, а за конечный промежуток времени.
Масса это количественная мера инертности тела. Чем больше масса, тем медленнее
тело изменяет свою скорость при взаимодействии. В системе СИ:
[m]= [кг].
Причиной ускорения тела является взаимодействие тел.
Сила это векторная величина, которая является мерой взаимодействия тел. Вектор силы направлен вдоль ускорения, приобретаемого телом под действием силы. По модулю сила равна произведению массы
тела на модуль его ускорения. В системе СИ:[F]= [Н]= кг м .
c2
F = mar
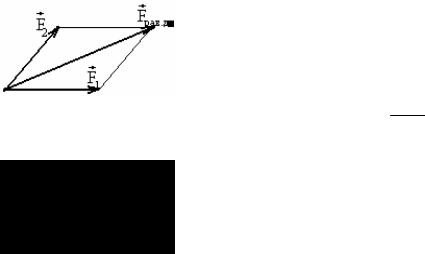
Равнодействующая сила это вектор, равный векторной сумме сил, приложенных к телу.
Fрав.д. = F1 + F2

Второй закон Ньютона.
1. Произведение массы тела на вектор его ускорения равно векторной сумме сил, приложенных к телу (равнодействующей силе).
mar = F1 + F2 +... + Fn = Fрав.д.
2. Вектор ускорения тела прямо пропорционален вектору равнодействующей силы и обратно пропорционаленr массе тела.
ar = Fравm.д.
Импульс тела это вектор, равный произведению массы тела
на вектор его скорости. В системе СИ: [p]= кг м .
c
p = mυ
Импульс силы это вектор, равный произведению вектора силы на время ее
действия. В системе СИ: [Ft]= [Н с]= кг м .
c
3. Изменение импульса тела равно импульсу равнодействующей силы.
mar = Fрав.д. |
|
||||||||
|
|
|
|
r |
|
|
|
|
|
ar = |
dυ |
|
|
|
|
||||
dt |
|
|
|
|
|||||
|
|
r |
|
|
|
r |
r |
||
|
dυ |
|
|
d |
|||||
m |
= |
mυ = F |
|||||||
|
|
|
|||||||
dprdt |
|
|
dt |
|
рав.д. |
||||
r |
|
r |
r |
||||||
|
|
= F |
= F |
+... + F |
|||||
|
|
||||||||
dtr |
|
рав.д. |
1 |
n |
|||||
r |
|
|
|
|
|||||
dp = Fрав.д.dt |
|
||||||||
pr = pr |
|
|
t |
r |
|
||||
0 |
+ ∫Fрав.д.dt |
||||||||
|
|
|
|
|
0 |
|
|
||
Третья формулировка является наиболее общей формулировкой второго закона Ньютона и справедлива, даже если масса переменная.

Третий закон Ньютона.
Границы применимости законов Ньютона.
Рассмотрим взаимодействие двух тел. Опыт показывает, что оба тела приобретают ускорения, направленные в противоположные стороны. Модуль ускорения обратно пропорционален массе тел.
|
|
|
|
|
|
|
|
|
ar |
1 ↑↓ ar |
2 |
|
|
|
|||
|
a1 |
= |
m2 |
|
|
|
||
|
a 2 |
m1 |
|
|
||||
|
r |
r |
|
|||||
|
|
|
|
|
|
|
||
m1a1 |
= −m2a |
2 |
||||||
|
r |
|
|
r |
|
|
||
F12 |
= −F21 |
|
|
|||||
Третий закон Ньютона.
Силы, с которыми взаимодействуют два тела, равны по модулю и противоположны по направлению (сила действия равна по модулю и противоположна силе противодействия).
Силы F12 и F21 приложены к разным телам. Складывать их нельзя. Можно
складывать силы, приложенные к одному телу.
Границы применимости законов Ньютона.
Законы Ньютона не справедливы если:
1.Скорость тела сравнима со скоростью света (в этом случае справедлива специальная теория относительности).
2.Размеры тела малы и сравнимы с атомными размерами порядка 10-10 м (в этом случае справедлива квантовая механика).
3.Массы тел сравнимы со звездными массами (в этом случае справедлива общая теория относительности).