

lek_mehanika
.pdfЗакон сохранения импульса.
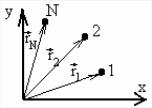
Рассмотрим N взаимодействующих тел (материальных точек). На каждое тело действуют силы взаимодействия со стороны других (N-1) тел и некоторые внешние силы.
Запишем для каждого тела второй закон Ньютона.
|
|
|
|
|
|
|
|
|
|
|
|
|
m1ar |
1 |
= F12 |
+ F13 +... + F1i +... + F1j +... + F1вн |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
mi ari |
|
N |
r |
r |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
= ∑Fin |
+ Fiвв , i |
=1,..., N |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сложим все N уравнений. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
N |
N r |
N r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑mi ari = ∑∑Fij + ∑Fiвв |
,i |
≠ j |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
i=1 j=1 |
i=1 |
|
|
||
N |
|
|
|
N |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
∑∑Fij = 0 - по третьему закону Ньютона. |
|
|
|
|||||||||||||||||||
i=1 j=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
N |
|
|
|
|
|
|
|
|
|
N r |
|
|
|
|
|
|
|
|
|
|
|
|
∑mi ari = ∑Fiвв |
|
|
|
|
|
|
|
|
||||||||||||||
i=1 |
|
|
|
|
|
|
i=1r |
|
r |
|
r |
|
|
|
|
|
||||||
m |
i |
a |
i |
= m |
i |
dυi |
|
= |
d(mi υi ) |
= |
dpi |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
dt |
|
dt |
|
dt |
|
|
|
|
|
|||||||
N |
|
|
|
|
r |
N |
r |
|
|
|
|
|
|
|
|
|
|
|
||||
∑ |
dpi |
= |
∑Fiвв |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
i=1 |
|
|
dt |
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
d |
|
|
|
|
N |
|
|
|
|
N |
r |
|
|
|
|
|
|
|
|
|||
|
|
(∑pri ) = ∑Fiвв |
|
|
|
|
|
|
|
|
||||||||||||
dt |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
i=1 |
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
||||
Здесь ∑N pri = pr - полный импульс системы.
i=1
Выводы: 1) Внутренние силы взаимодействия Fij не могут изменить суммарный
(полный) импульс системы. Только внешние силы могут изменить суммарный импульс системы; 2) В замкнутой системе полный импульс сохраняется.
Замкнутая система это система тел, взаимодействующих только между собой и не взаимодействующих с телами, не входящими в систему (внешними).
Закон сохранения импульса.
В замкнутой системе векторная сумма импульсов всех тел остается постоянной при любых движениях и взаимодействиях.
Центр масс.
Центр масс это точка, через которую должна проходить линия действия силы, чтобы под действием этой силы тело двигалось поступательно.
1.Поступательное
2.Поступательное + вращательное движение
Рассмотрим систему N материальных точек.
N r
(∑Fiвв
i=1
N |
|
|
|
|
N |
r |
||
∑mi ari = ∑Fiвв |
||||||||
i=1 |
|
r |
|
|
i=1 |
r |
||
r |
= |
dυ |
i |
= |
|
d |
2 r |
|
a i |
|
|
|
i |
|
|||
dt |
|
|
dt 2 |
|||||
|
|
|
|
|
||||
N |
|
r |
|
|
N |
|
|
|
∑mi ai |
= ∑mi |
|||||||
i=1 |
|
|
|
|
i=1 |
|
|
|
|
|
|
|
N r |
||||
Marц.м. = ∑Fiвв
i=1
|
|
N |
r |
|
|
|
N |
r |
= |
∑mi ri |
x |
|
= |
∑mi xi |
|
i=1 |
|
|
i=1 |
||||
r |
|
цм |
|||||
N |
|
N |
|||||
ц.м. |
|
|
|
|
|||
|
|
∑mi |
|
|
|
∑mi |
|
|
|
i=1 |
|
|
|
|
i=1 |
Внутренние силы не могут изменить положение центра масс системы. Докажем это.
d |
2 r |
d |
2 |
N |
d |
2 |
N |
2 r |
|
|||||
ri |
= |
|
|
(∑mi rri ) = |
|
|
(rrц.м. ∑mi ) = M |
d |
rц.м. |
= Mar |
ц.м. |
|||
|
2 |
dt |
2 |
dt |
2 |
|
2 |
|||||||
dt |
|
i=1 |
|
i=1 |
dt |
|
||||||||
Пусть в начальный момент времени t=0, υц.м. = 0 . Пусть система замкнутая
= 0) . Тогда a ц.м. = 0 . Значит rц.м. = const .
Раздел 4 Силы в Природе.
Вопросы.
Закон всемирного тяготения. Ускорение свободного падения. Сила тяжести. Вес тела.
Сила упругости. Деформация. Упругие и пластические деформации. Абсолютная и относительная деформации. Закон Гука. Механическое напряжение. Модуль Юнга.
Трение. Сила трения покоя. Коэффициент трения покоя. Сила трения скольжения. Коэффициент трения скольжения. Сила сопротивления среды.
Силы инерции.
Сила тяжести. Вес тела. Закон всемирного тяготения.
Две материальные точки притягиваются с силой, пропорциональной произведению масс точек и обратно пропорциональной квадрату расстояния между ними.
F12 |
= F21 |
= G |
m1m2 |
|
r 2 |
||||
|
|
|
Н м2
кг2 Силы тяжести направлены вдоль прямой,
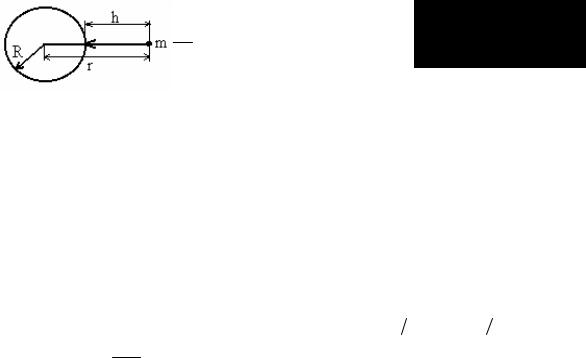
соединяющей центры масс тел и приложены к центрам масс.
Данная форма закона всемирного тяготения справедлива также для тел, имеющих форму сфер или шаров. При этом предполагается, что массы тел сосредоточены в центре сфер или шаров (r – расстояние между центрами сфер или шаров).
Ускорение свободного падения.
|
r |
= G |
Mm |
|
|
|
|
|
|
|
|
|||
|
F |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||||
|
T |
|
|
|
|
r2 |
|
|
|
|
|
|
||
|
|
|
r |
|
|
|
|
|
|
|
|
|||
|
g = |
FT |
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r 2 |
= (R + h)2 |
|
|
|
|
|
g0 |
||||||
|
g = |
|
GM |
= |
GM 1 |
= |
||||||||
|
(R + h)2 |
|
R 2 |
|
(1+ h R)2 |
(1 + h R)2 |
||||||||
Где g0 = GMR 2 - ускорение свободного падения у поверхности Земли.
Вывод: в поле тяжести Земли все тела падают с одинаковым ускорением, которое зависит от радиуса Земли, ее массы и высоты тела над поверхностью Земли.
FT = mgr
Вес тела это сила, с которой тело действует на опору или подвес. Если N - сила реакции опоры, приложенная к телу, то pr = −N - вес, приложенный к опоре со стороны тела. В общем случае вес не равен силе тяжести.
Примеры:
1.pr = −N = mgr
2.pr > Ft
3.pr < Ft
4.p = 0
Сила упругости. Закон Гука.
Деформация это изменение размеров или формы тела. При деформации возникает сила упругости, которая пытается вернуть телу прежние размеры и форму.
При упругих деформациях после снятия внешних сил, тело полностью восстанавливает размеры и форму. При неупругих деформациях после снятия внешних сил полного восстановления размеров и формы не происходит, остается так называемая остаточная деформация.
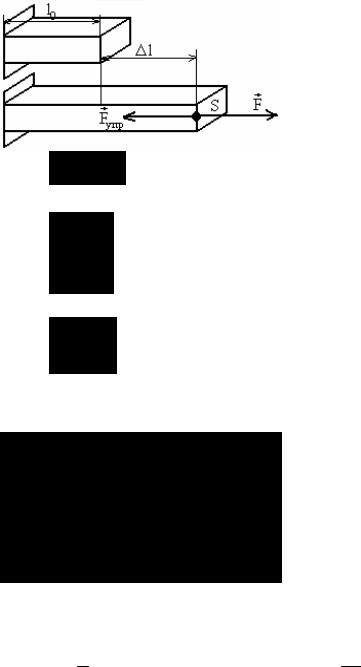
l = l −l0 - абсолютная деформация.
ε = ll - относительная деформация.
S– площадь торца, к которому приложена сила.
σ= F - напряжение. В системе СИ: [σ]= Н = [Па]. S м2
Закон Гука.
При малых деформациях (ε<<1, l<<l0) сила упругости прямо пропорциональна
абсолютной деформации. |
|
|
|
Fупр = −k l |
|
|
|
В системе СИ: [k]= |
Н |
|
- коэффициент упругости, зависящий от материала тела и |
|
|||
м |
|
|
|
его геометрических размеров. |
|
|
|

Fупр = −F
SlF = kSll σl = kSε
σ = Eε
Где E = klS - модуль Юнга.
Всистеме СИ: [E]= Н = [Па]. Модуль Юнга зависит только от материала тела.
м2
Сила трения.
Сила трения возникает на поверхности соприкосновения тел.
Рассмотрим тело, которое покоится на горизонтальной поверхности. Пусть на тело действует внешняя сила. Если эта сила меньше некоторого определенного значения, то тело будет покоиться. Внешняя сила уравновешивается силой трения покоя.
1. Fвн < μпок N
Fвн = −Fтр.п.
μпок - коэффициент трения покоя.
2.Fвн < μпок N - тело начинает скользить, возникает сила трения скольжения. Fтр.с. = μскN , где μск – коэффициент трения скольжения.
μпок>μск.
При решении задач будем полагать μск≈μпок=μ. Сила трения скольжения направлена против
относительной скорости движения тела. При малых скоростях сила трения скольжения не зависит от скорости тела, а зависит от материала и состояния соприкасающихся поверхностей. Сила трения скольжения пропорциональна силе нормального давления тела на поверхность (по третьему закону Ньютона).
Fнд = −N
Силы инерции.
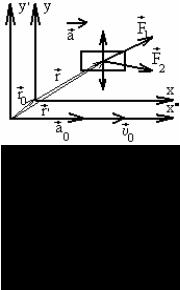
Рассмотрим движение тела в ИСО с ускорением. Запишем второй закон Ньютона для ИСО.
mar = F1 +... + Fn
Рассмотрим движение этого же тела в НИСО.
r = r′+ r0 |
|
|
|
|||
r |
r |
r |
|
|
|
|
υ = υ′+ υ0 |
|
|
|
|||
ar = ar′+ ar |
0 |
r |
|
r |
||
r |
r |
|
|
|||
ma |
′+ ma |
0 |
= F1 +... + Fn |
|||
r |
r |
|
|
r |
|
r |
ma |
′ = F1 |
+... + Fn − ma 0 |
||||
Здесь Fинерц = −mar |
0 |
- сила инерции. |
||||
mar′ = F1 +... + Fn + Fинерц - закон Ньютона для НИСО. Сила инерции является фиктивной силой, так как нельзя указать тело, со стороны
которого она действует. Ускорение a0 – это кажущееся ускорение, появляющееся за счет движения системы отсчета.
Раздел 5 Работа. Энергия.
Закон сохранения механической энергии.
Вопросы.
Механическая работа. Мощность. Коэффициент полезного действия. Кинетическая энергия. Изменение кинетической энергии и работа.
Потенциальные (консервативные) силы. Потенциальная энергия. Работа потенциальной силы. Работа силы тяжести. Работа силы упругости. Выражение силы через потенциальную энергию.
Законы изменения и сохранения механической энергии. Работа силы трения.
Механическая работа.
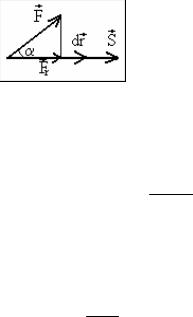
1. Работа силы за бесконечно малый промежуток времени равна скалярному произведению вектора силы на вектор бесконечно малого перемещения.
dA = (F drr) = FdrCosα
2. Работа за конечный промежуток времени.
t |
t |
r |
r |
t |
t |
A = ∫dA = ∫Fdr |
= ∫FdrCosα =∫Fr dr |
||||
0 |
0 |
|
|
0 |
0 |
3. Работа постоянной силы при прямолинейном движении. В системе СИ:
[A]= [Дж]= [Н м]= кгc2м2
A = FsCosα
Кинетическая энергия это половина произведения массы тела на квадрат его скорости.
Ek = m2υ2
Получим связь между кинетической энергией и работой. Рассмотрим второй закон Ньютона.
mar = F |
|
+... |
+ F |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
r |
1 |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
||||
ar = |
dυ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
r |
|
|
|
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
||||||
mdυ |
|
= F +... + F |
|
|
×drr |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
dtr |
|
|
|
|
|
|
1 |
|
|
|
n |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
r |
|
|
|
||||||||
mdυ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
drr |
= F drr +... + F drr |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
dt |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
n |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
rr |
|
|
r |
r |
|
r r |
|||||||
d(υ2 ) = |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
2υdυ = dυυ+ υdυ = 2υdυ |
||||||||||||||||||||||||||
d(υ |
2 |
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
) = 2υdυ |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
r |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dr |
= υdt |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
r |
|
|
|
dυυdt = υdυ = d(υ |
|
) = dυdr |
|
|||||||||||||||||||||||
|
|
r |
|
|
|
|
|
|
|
r |
r |
|
|
|
|
|
|
|
|
r |
|
|||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
dt |
|
|
||
|
mυ |
2 |
|
|
|
|
r |
|
|
|
|
|
|
|
r |
|
|
|
||||||||
d( |
|
) |
|
= F drr +... + F drr |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
n |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
E |
|
mυ |
2 |
|
|
|
t r |
|
|
|
|
|
t |
r |
|
|
||||||||||
∫d( |
|
|
) = ∫F1drr +... + ∫Fn drr |
|
||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
0 |
|
|
|
|
2 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
||||
mυ2 |
|
− |
|
|
mυ2 |
= A1 +... + An |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||||||||||||||
2 |
|
|
|
|
|
|
2 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Ek |
|
= A1 +... + An |
|
|
|
|
|
|
|
|||||||||||||||||
Потенциальные или консервативные силы это силы, работа которых при перемещении тела не зависит от траектории движения тела и определяется только начальным и конечным положениями тела (сила всемирного тяготения, сила Кулона).
Для потенциальных сил вводится понятие потенциальной энергии таким образом, чтобы работа потенциальной силы была равна изменению потенциальной энергии со знаком «минус».
dA = −dEп
A = − Eп = Eп1 − Eп2
Примеры:
1. Потенциальная энергия силы тяжести.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F = G |
Mm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
r 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r r |
|
|
|
GMm |
|
|
|
GMm |
|
|
|
|
|
|
|
|
|||
dA = Fdl |
= |
|
|
dlCosα = |
|
|
|
dr , dr = dlCosα |
|
||||||||||
|
r 2 |
r 2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
r2 |
|
|
r2 |
|
dr |
|
1 |
|
|
|
|
GMm |
|
GMm |
|
||||
A = ∫dA = ∫GMm |
|
|
|
r2 |
|
|
|
||||||||||||
|
= GMm(− |
|
) |
|
r1 |
= |
|
− |
|
= Eп1 − Eп2 |
|||||||||
r 2 |
r |
|
r |
r |
|||||||||||||||
|
|
|
|
||||||||||||||||
r |
|
|
r |
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
||
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eп = − GMmr + const
Потенциальная энергия определяется с точностью до произвольной константы, таким образом, физический смысл имеет не сама потенциальная энергия, а ее разность,
так как A = − Eп .
Найдем потенциальную энергию силы тяжести вблизи поверхности Земли.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eп = − |
GMm |
= − |
GMm |
= − |
GMm |
|
1 |
≈ − |
GMm |
(1− |
h |
) = − |
GMm |
+ |
GMmh |
= |
|
r |
R + h |
R 1+ h R |
R |
R |
R |
R 2 |
|||||||||||
|
|
|
|
|
|
|
|
||||||||||
= const + mgh
Eп ≈ mgh
Если константу отбросить, то потенциальная энергия отсчитывается от поверхности Земли. Потенциальная энергия силы тяжести в общем случае равна нулю в бесконечно удаленной точке.
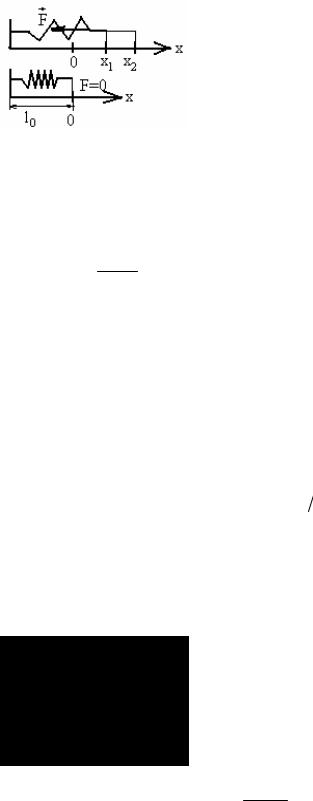
2. Потенциальная энергия силы упругости.
Если пружина не деформирована – 0. dA = Fdx = −Kxdx
x2 |
|
|
x2 |
|
kx 2 |
|
x2 |
|
kx 22 |
|
kx12 |
|
|
|
|
|
|
|
|
||||||||
∫dA = −k ∫xdx = − |
2 |
|
|
x1 |
= −( |
2 |
− |
2 |
) = −(Eп2 − Eп1 ) |
||||
x1 |
|
|
x1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Eп = |
kx |
2 |
|
(x << l0 ) |
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Всистеме СИ: [E]= [Дж]= кг м2 .
c2
Получим связь между силой и потенциальной энергией.
dA = Fdl = FdlCosα = Fl dl , Fl = lCosα |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||
dA = −dEп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Fldl = −dEп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
F = − |
dEп |
|
|
F = − ∂Eп |
F = − ∂Eп |
F = − ∂Eп |
|
|
|
|
|
|||||||||
l |
|
|
dl |
|
x |
∂x |
|
|
y |
∂y |
|
z |
∂z |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
r |
r |
+ F |
r |
r |
= −( |
∂E |
|
r |
∂E |
|
r |
∂E |
r |
|
(x, y, z) = − E |
|
(x, y, z) |
|||
F |
= F i |
j + F k |
|
п |
i + |
|
п |
j + |
|
п k) = −gradE |
п |
п |
||||||||
|
x |
|
y |
|
z |
|
∂x |
|
∂y |
|
∂z |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
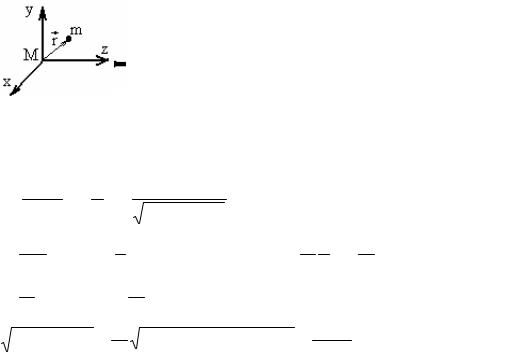
Пример:
Eп |
= − GMm |
= − |
α |
= − |
α |
|
|
|
|||
|
|
|
|||||||||
|
|
r |
|
|
r |
|
x 2 + y2 + z2 |
|
|
|
|
F |
= − ∂Eп |
= −(−α(− 1)(x 2 + y2 + z2 )− |
3 |
(2x)) = − α x = − α Cosα |
|
||||||
2 |
|
||||||||||
x |
|
∂x |
|
|
|
2 |
|
|
r 2 r |
r 2 |
|
|
|
|
|
|
|
|
|
||||
F |
= − α Cosβ F |
= − α Cosγ |
|
|
|
||||||
|
|
|
|||||||||
y |
|
r 2 |
|
|
z |
|
r 2 |
|
|
|
|
|
|
|
|
= α |
|
|
|
||||
F |
= |
F2 + F2 |
+ F2 |
Cos2 α + Cos2β+ Cos2 γ = GMm |
|
|
|||||
|
|
x |
y |
z |
|
r 2 |
|
|
r 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Закон сохранения и изменения полной механической энергии.
Рассмотрим тело, на которое действуют потенциальные силы, силы трения и
другие внешниеr силыr .r mar = Fп + Fтр + Fвн
Eк2 − Eк1 = Aп + Aтр + Aвн
Aп = −(Eп2 − Eп1 )
Eк2 − Eк1 − Eп1 + Eп2 = Aтр + Aвн
(Ek 2 + Eп2 ) −(Ek1 + Eп1 ) = Aтр + Aвн
E = Eк + Eп - полная механическая энергия тела.
E2 −E1 = Aтр +Aвн − (*) - закон изменения энергии для одного тела.
Если система состоит из N тел, и (*) записать для каждого тела системы, а потом сложить их, то получится закон изменения и сохранения механической энергии для системы тел.
N |
N |
∑(Ei2 −Ei1 ) = ∑(Aiтт +Aiвв ) |
|
i=1 |
i=1 |
Закон сохранения механической энергии.
Если в замкнутой системе взаимодействие между телами осуществляется только потенциальными силами, и нет сил трения, то полная механическая энергия системы остается постоянной.
N |
N |
∑Ei2 |
= ∑Ei1 = const |
i=1 |
i=1 |
Если в замкнутой системе действуют силы трения, то механическая энергия не сохраняется, а переходит во внутреннюю энергию (тепло).
Q = E1 − E2 = −Aтр
Суммарная работа всех сил трения в замкнутой системе всегда отрицательна, хотя отдельные силы трения могут совершать положительную работу.