

лекции строймех
.pdfлённую нагрузку, при постоянной изгибной жёсткости поперечного сечения EJ на этом участке? Как запишется матрица ВМ для участка, где нет распределённой нагрузки, при тех же условиях?
4.Для загруженной сосредоточенными силами в узлах фермы требуется вычислить заданную преподавателем матрицу перемещений. Какое матричное соотношение необходимо использовать для решения этой задачи? Поясните смысл элементов мат-
риц Ni, BN, NF. Сколько строк и столбцов будет в этих матрицах? Какой вид будет иметь матрица BN для конкретного стержня фермы?
5.Как в матричной форме от силового воздействия вычисляются матрицы перемещений в плоских комбинированных сис-
темах? Какой смысл имеют элементы матриц Li, B и LF ? Из каких блоков состоят эти матрицы? Как формируются отдельные
блоки этих матриц: Mi, Ni, BM, BN, MF, NF ?
6.Запишите матричное соотношение для определения матриц перемещений в произвольных плоских стержневых системах от силового воздействия. Поясните для этого случая структуру
матриц Li, B и LF. Как формируются блоки Qi, BQ, QF, входящие в состав матриц Li, B и LF, на отдельных грузовых участках? От чего зависит структура этих блоков?
7.Какую структуру имеют матицы Li, B и LF для пространственных стержневых систем в самом общем случае ?
8.Задана плоская стержневая система (балка, рама, ферма или комбинированная). Запишите матричное соотношение для определения перемещения в ней от температурных воздействий.
Какую структуру имеют матрицы Lt, Bt и T, входящие в эти соотношения? Поясните смысл элементов подматриц Mt, Nt, Btn,r, Bt,0, Tnr, T0. Какой размер имеет любая из этих подматриц для заданной системы?
9.В балочной или рамной системе часть опорных связей получила смещение на заданную величину. Как от этого воздействия вычислить элементы заданной преподавателем матрицы перемещений в матричной форме? Какой смысл имеют элементы
матриц Rc и (с)? Каковы размеры этих матриц? Сформулируйте правило знаков, используемые при формировании матрицы Rc.
10. Какое матричное соотношение используется для вычисления заданной матрицы перемещений в случае независимых друг от друга силовых, температурных и кинематических воздействий на сооружение? Из каких блоков состоят матрицы L0, B0 и L∑, необходимые для решения поставленной задачи? Запишите эти матрицы в блочной форме и поясните смысл элементов под-
матриц Li, Lt, Rc, B, Bt, E, LF, T, (с).
13.9. Рекомендуемая литература
1.Леонтьев Н.Н. Основы строительной механики стержневых систем: Учеб. для вузов / Н.Н. Леонтьев, Д.Н. Соболев, А.А. Амосов. – М.: Изд-во ассоциации строительных вузов, 1996. – 541 с.
Гл. 5. Основы теории расчёта линейно деформируемых систем. § 5.7. Способы вычисления интегралов Мора. – С. 115.
2.Смирнов А.Ф. Строительная механика. Стержневые системы: Учеб. для вузов / А.Ф. Смирнов, А.В. Александров, Б.Я. Лащеников, Н.Н. Шапошников. – М.: Стройиздат, 1981. – 512 с.
Гл. VIII. Определение перемещений по методу Мора. § 43. Матричная форма определения перемещений по методу Мора. – С. 226– 238.
3.Клейн Г.К. Руководство к практическим занятиям по курсу строительной механики. Статика стержневых систем: Учеб. пособие / Г.К. Клейн, Н.Н. Леонтьев. – М.: Высш. школа, 1980. – 384 с.
Гл. VIII. Потенциальная энергия упругих систем. Определение перемещений стержневых систем. § VIII.9. Матричная форма определения перемещений. – С. 130–136.
4.Проценко В.М. Расчёт статически определимых систем: Метод. указания к контрольным работам по строительной механике / В.М. Проценко, В.Г. Себешев. – Новосибирск: НИСИ, 1990. – 52 с. Задача № 6. Определение перемещений в статически определимой раме. – С. 43–47.
39 |
40 |

ЛЕКЦИЯ ЧЕТЫРНАДЦАТАЯ
ОБЩИЕ СВЕДЕНИЯ О СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМАХ
14.1.Характеристика статически неопределимых систем и некоторые их свойства
14.2.Степень статической неопределимости
14.3.Методы расчёта статически неопределимых систем
14.4.Вопросы для самопроверки
14.5.Рекомендуемая литература
14.1.Характеристика статически неопределимых систем и некоторые их свойства
Расчёт сооружений на прочность, жёсткость и устойчивость требует определения реакций опорных связей и внутренних усилий в характерных сечениях их элементов. В статически неопределимых системах эту задачу, привлекая только условия равновесия, решить невозможно. Это было показано в сопротивлении материалов, где для расчёта отдельных статически неопределимых стержней, работающих на растяжение–сжатие, кручение, изгиб, использовалась группа соотношений, включающая в себя уравнения равновесия, геометрические и физические уравнения.
Главной особенностью статически неопределимых систем является наличие лишних связей в их структуре. Лишние связи сооружений можно удалять, не нарушая их геометрической неизменяемости. Например, удалением опорных вертикальных связей В и С неразрезная балка преобразуется в консольный стержень, введением цилиндрических шарниров K и L – в статически определимую двухпролётную составную балку (рис. 14.1,а). Удалив из статически неопределимой фермы стержень 14 или 34, получим два варианта статически определимой шарнирностержневой системы с простой структурой (рис. 14.1,б). Статически неопределимая двухшарнирная рама после удаления горизонтальной связи опоры В превращается в ломаный стержень, при-
креплённый к диску "земля" шарниром А и вертикальной связью, ось которой не проходит через шарнир А. Введением цилиндрического шарнира С эта же рама преобразуется в статически определимую трёхшарнирную раму (рис. 14.1,в).
Особенностью всех лишних связей, удалённых из статически неопределимых систем, показанных слева на рис. 14.1, является то, что реакции в них от внешних воздействий с помощью уравнений статики определить нельзя. Эти связи называются условно необходимыми. Вместе с тем, в составе рассмотренных сооружений имеются связи, усилия в которых определяются из условий равновесия: горизонтальная связь опоры А неразрывной балки (рис. 14.1,а), стержни А2,23, А1, А3 фермы (рис. 14.1,б), вертикальные связи пятовых шарниров А и В рамы (рис. 14.1,в). Такие связи называются абсолютно необходимыми. Их удаление превращает заданное сооружение в геометрически изменяющую или мгновенно изменяемую систему.
Отметим некоторые свойства статически неопределимых систем.
1. Статически неопределимые сооружения обладают большей надёжностью по сравнению со статически определимыми. Действительно, выключение из работы статически неопределимых систем одной или всех лишних условно необходимых связей
41 |
42 |
не нарушает их геометрической неизменяемости. В статически определимых системах удаление только одной связи приводит к образованию механизмов с одной степенью свободы.
2.В статически неопределимых системах от температурных
икинематических воздействий реакции условно необходимых внешних и внутренних связей не равны нулю.
Покажем это на примере определения реакций опорных связей двухшарнирной рамы с пятовыми шарнирами на разных уровнях (рис. 14.2). Пусть температура со стороны внутренних волокон эле-
ментов рамы изменилась на t°, а горизонтальная и вертикальная связи левой шарнирно-неподвижной опоры сместились соответственно на (1) и (2). Условия равновесия рамы имеют вид:
∑Fx = 0, HB – HA = 0,
∑Fy = 0, VA – VB = 0,
∑mom (F)A = 0, HB a + VB ℓ = 0.
Полученная система трёх уравнений, содержащая четыре неизвестных, в общем случае имеет ненулевые решения. От реакций шарнирно-неподвижных опор в сечениях рамы возникнут изгибающие моменты, поперечные и продольные силы. Таким образом, в отличие от статически определимых систем в статически неопределимых системах от температурных и кинематических воздействий имеют место не только перемещения, но и деформации, вызывающие внутренние усилия.
Остальные свойства статически неопределимых систем будут сформулированы и обоснованы в последующих лекциях.
14.2. Степень статической неопределимости
Разность между числом неизвестных, необходимых для расчёта заданного сооружения, и числом независимых уравнений равновесия, составленных для решения задачи, называется степе-
нью статической неопределимости сооружения. Другими словами, эта разность определяет количество лишних связей в заданной расчётной схеме сооружения, усилия в которых требуется определить, не прибегая к уравнениям равновесия.
Степень статической неопределимости можно вычислить, преобразуя заданную статически неопределимую систему в статически определимую и параллельно подсчитывая число удалённых связей. Такой подход является наиболее общим, но часто у читателей вызывает определённые трудности. Поэтому в плоских стержневых системах на начальном этапе изучения этой и последующих тем степень статической неопределимости рекомендуется определять по формуле "контуров".
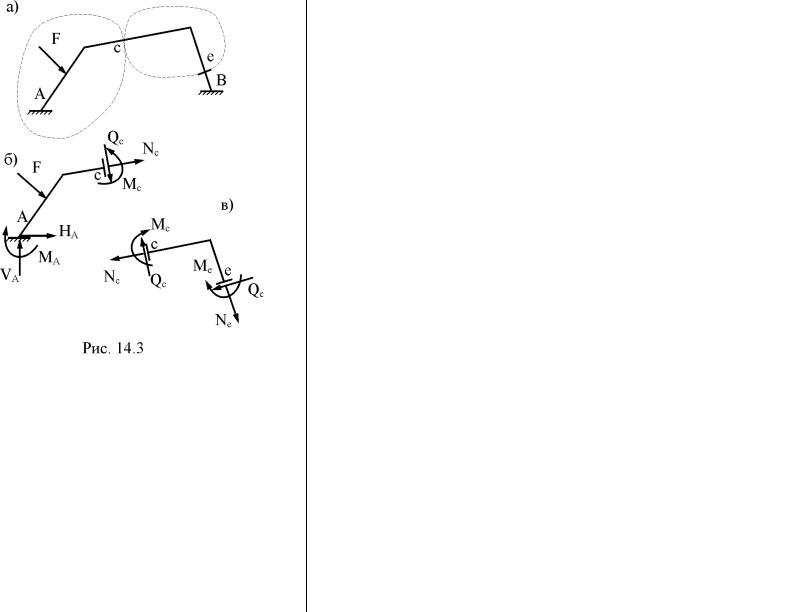
Любой замкнутый плоский стержневой контур содержит три лишних связи, т.е.
трижды статически неопределим. В этом можно убедиться, рассматривая определение внутренних усилий в сечении "с" рамы, представляющей собой вместе с диском "земля" замкнутый контур
(рис. 14.3,а). Любая отсечённая часть этой рамы имеет шесть неизвестных: рис. 14.3,б – внутренние усилия в се-
чении "с" Mc, Qc, Nc и реакции заделки VA,
HA, MA; рис. 14.3,в – внутренние усилия в
сечениях "с" и "е" Mc,
Qc, Nc, Mе, Qе, Nе. Равновесие рассматриваемых выше отсечённых
43 |
44 |
частей описывается тремя уравнениями. Таким образом, разность между числом неизвестных, необходимых для описания напря- жённо-деформированного состояния рамы, и числом уравнений равновесия равно трём.
Если сооружение состоит из К не накладывающихся друг на друга контуров, то общее число лишних связей в нём равно 3К.
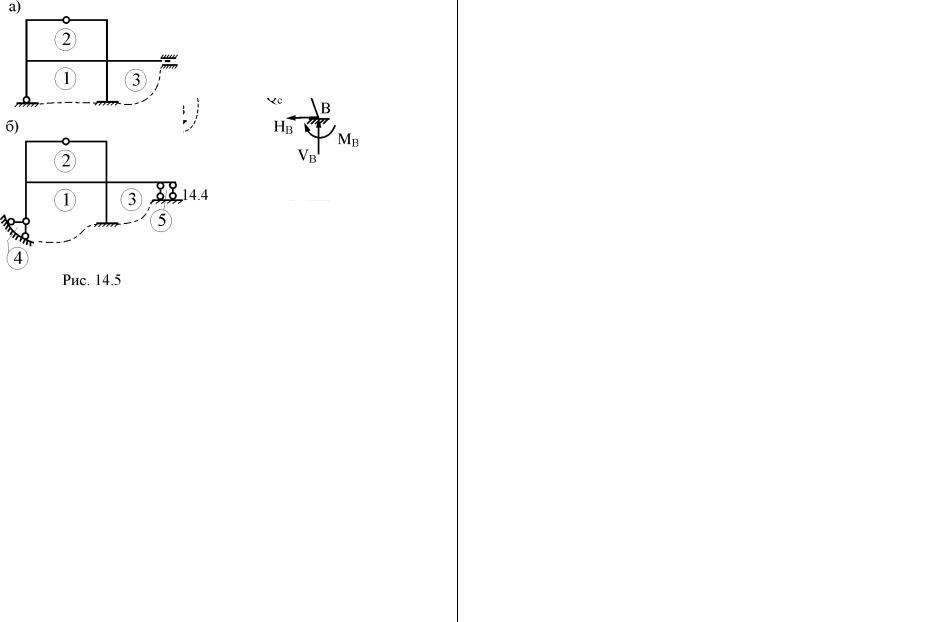
Наличие в одноконтурном сооружении одного простого цилиндрического или поступательного шарнира снижает степень статической неопределимости такого сооружения на единицу, так как любая отсечённая часть контура, включающая в себя сечение, расположенное на бесконечно близком расстоянии от шарнира, будет содержать теперь пять, а не шесть, неизвестных (рис. 14.4). Напомним читателям, что простой цилиндрический или поступа-
тельный шарнир связывает только два диска. Если шарнир соединяет n дисков, то он эквивалентен n–1 простому шарниру (см. п. 2.3 части 1 настоящего курса лекций).
В общем случае, если К контуров имеют Н простых цилиндрических или поступательных шарниров, то степень статической неопределимости сооружения равна
nst = 3K – H. (14.1)
Число контуров и простых шарниров зависит от способа представления расчётной схемы сооружения. На рис. 14.5,а,б показано изображение расчётной схемы одной и той же рамы с различным количеством контуров и простых шарниров. Естественно, что степень статической неопределимости рамы не зависит от способа изображения её расчётной схемы. Действительно:
nst = 3 3 – 3 = 6 (рис. 14.5,а), nst = 3 5 – 9 = 6 (рис. 14.5,б).
45 |
46 |

ПР И М Е Р 14.2.1. Используя формулу "контуров", вычислить степень статической неопределимости плоских стержневых систем, изображённых на рис. 14.6.
На рис. 14.6,а,б цифрами, объединёнными кружками, пронумерованы замкнутые контуры. Рядом с цилиндрическими шарнирами цифрами помечено количество простых шарниров.
nst = 3 3 – 8 = 1 (рис. 14.6,а), nst = 3 9 – 24 = 3 (рис. 14.6,б).
14.3. Методы расчёта статически неопределимых систем
Для расчёта статически неопределимых систем используются следующие методы:
1.Метод сил.
2.Метод перемещений.
3.Комбинированный метод расчёта симметричных систем.
4.Смешанный метод.
5.Метод конечных элементов.
6.Приближённые методы (метод последовательных приближений и др.).
Подробное изложение сути этих методов дано ниже в настоящем (метод сил) и последующих изданиях лекций (остальные методы).
14.4. Вопросы для самопроверки
1.Какие системы называются статически неопределимыми?
2.Какие связи сооружения называются условно необходимыми? Абсолютно необходимыми? К чему приводит удаление из сооружения хотя бы одной абсолютно необходимой связи?
3.Задана плоская статически неопределимая система. Содержит ли эта система абсолютно необходимые связи? Если да, то дайте этим связям статическую и кинематическую характеристику.
4.Задано температурное или кинематическое воздействие (смещение одной из опорных связей) на простейшую статически
47
неопределимую систему. Докажите, что от указанных воздействий в сечениях этой системы будут иметь место внутренние усилия.
5.Почему статически неопределимые системы по сравнению со статически определимыми обладают более высокой надёжностью?
6.Что называется степенью статической неопределимости сооружения?
7.Сформулируйте общий принцип определения степени статической неопределимости сооружения.
8.Запишите формулу "контуров" для определения степени статической неопределимости сооружения. Поясните, как определяется число простых цилиндрических и поступательных шарниров Н, используемое в этой формуле?
9.Что называется простым цилиндрическим или поступательным шарниром? Как определяется число простых шарниров
вслучае, когда осуществляется шарнирное сочленение нескольких дисков в одном узле?
10.Почему бесшарнирный замкнутый контур трижды статически неопределим? Почему введение цилиндрического или поступательного шарнира в такой контур снижает его степень статической неопределимости на единицу?
11.Задана плоская статически неопределимая система. Определите степень статической неопределимости её, используя общий принцип или формулу "контуров". Преобразуйте эту систему в статически определимую, удаляя, по своему усмотрению, лишние связи.
14.5. Рекомендуемая литература
1.Леонтьев Н.Н. Основы строительной механики стержневых систем: Учеб. для вузов / Н.Н. Леонтьев, Д.Н. Соболев, А.А. Амосов. – М.: Изд-во ассоциации строительных вузов, 1996. – 541 с.
Гл. 5. Основы теории расчёта линейно деформируемых систем. § 5.1. Общая характеристика методов расчёта статически неопределимых систем. – С. 94–96.
2.Дарков А.В. Строительная механика: Учеб. для вузов / А.В. Дарков, Н.Н. Шапошников. – М.: Высш. школа, 1986. – 607 с.
48
Гл. 6. Расчёт статически неопределимых систем методом сил.
§ 6.1. Статическая неопределимость. – С. 193–199.
3.Смирнов А.Ф. Строительная механика. Стержневые системы: Учеб. для вузов / А.Ф. Смирнов, А.В. Александров, Б.Я. Лащеников, Н.Н. Шапошников. – М.: Стройиздат, 1981. – 512 с.
Гл. XI. Метод сил. § 57. Особенности расчёта статически неопределимых систем. § 58. Определение степени статической неопре-
делимости. – С. 309–316.
4.Клейн Г.К. Руководство к практическим занятиям по курсу строительной механики. Статика стержневых систем: Учеб. пособие / Г.К. Клейн, Н.Н. Леонтьев. – М.: Высш. школа, 1980. – 384 с.
Гл. IX. Расчёт рам методом сил. § IX.1. Порядок расчёта рам. –
С. 137. |
|
|
|
5. Анохин Н.Н. Строительная механика в примерах |
и задачах. |
||
Ч. 1. Статически |
определимые |
системы: Учеб. |
пособие / |
Н.Н. Анохин. – М.: Изд-во ассоциации строительных вузов, 1999. – 334 с.
Гл. 1. Кинематический анализ расчётных схем. § 1.2. Определение степени статической неопределимости плоских стержневых систем и образование из них статически определимых путём удаления лишних связей. – С. 22–28.
49 |
50 |
ЛЕКЦИЯ ПЯТНАДЦАТАЯ ТЕОРЕМЫ ВЗАИМНОСТИ СТРОИТЕЛЬНОЙ МЕХАНИКИ
15.1.Теорема о взаимности возможных работ
15.2.Теорема о взаимности перемещений
15.3.Теорема о взаимности реакций
15.4.Теорема о взаимности реакций и перемещений
15.5.Вопросы для самопроверки
15.6.Рекомендуемая литература
15.1.Теорема о взаимности возможных работ
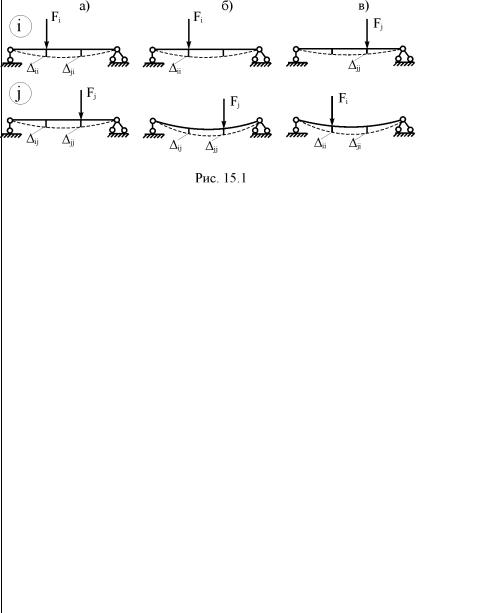
Рассмотрим два состояния какого-либо сооружения, например балки на двух опорах (рис. 15.1,а). В состоянии i на эту балку действует обобщённая сила Fi, а состоянии j – обобщённая сила Fj. Обобщённые силы Fi и Fj в упомянутых состояниях прикладываются статическим способом. На рис. 15.1,а показаны действительные ( ii, jj) и возможные ( ij, ji) перемещения по направлению обобщённых сил (о статическом способе приложения нагрузки и о смысле понятий "действительное перемещение", "возможное перемещение" см. в п. 10.2 десятой лекции второй части "Лекций по строительной механике стержневых систем").
Вычислим работу обобщённых сил Fi и Fj от их совместного воздействия. Сначала статическим способом приложим обобщённую силу Fi, которая на перемещении ii будет совершать
49 |
50 |

действительную работу Wext,ii (рис. 15.1,б). После окончательного формирования обобщённой силы Fi статическим способом при-
ложим обобщённую силу Fj. Балка получит дополнительные деформации и перемещения: ij – возможное перемещение в направлении обобщённой силы Fi от действия обобщённой силы Fj, jj – действительное перемещение в направлении обобщённой силы Fj от её же воздействия (рис. 15.1,б внизу). Постоянная по величине обобщённая сила Fi совершает возможную работу Wext,ij
на перемещении |
ij, а статически приложенная сила Fj – действи- |
тельную работу |
Wext,jj на перемещении jj. Суммарная работа |
W(1) внешних обобщённых сил будет равна
ext
Wext(1) = Wext,ii + Wext,ij + Wext, jj .
В п. 10.2 десятой лекции получены зависимости для вычисления действительной и возможной работы внешних обобщённых сил Fi и Fj:
Wext,ii = |
1 Fi |
ii , |
|
2 |
|
Wext,ij = Fi |
ij , |
|
Wext, jj = |
1 Fj |
jj . |
|
2 |
|
Таким образом, выражение суммарной работы от совместного действия обобщённых сил Fi и Fj в случае, когда первой прикладывается сила Fi, а второй Fj, примет вид:
Wext(1) |
= |
1 Fi |
ii + Fi ij + |
1 Fj jj . |
(15.1) |
|
|
2 |
|
2 |
|
Рассмотрим обратный |
|
порядок приложения |
обобщённых |
||
сил: первой приложим статическим способом обобщённую силу Fj, а затем, после её окончательного формирования, – обобщённую силу Fi (рис. 15.1,в). Суммарная работа внешних обобщён-
ных сил Fi и Fj Wext(2) в этом случае запишется:
Wext(2) = Wext, jj + Wext, ji + Wext,ii .
Учитывая, что Wext,ji = Fj ji, получим:
W(2) |
= 1 Fj |
jj +Fj ji + 1 Fi ii . |
(15.2) |
ext |
2 |
2 |
|
|
|
||
Значение суммарной работы внешних обобщённых сил Fi и |
|||
Fj не зависит от последовательности их приложения, т.е. |
|
||
|
W(1) |
= W(2) . |
|
|
ext |
ext |
|
Приняв во внимание соотношения (15.1) и (15.2) оконча- |
|||
тельно будем иметь: |
Fi ij = Fj jj , или |
|
|
|
|
||
|
Wext,ij = Wext,ji . |
(15.3) |
|
Выражение (15.3) и составляет содержание теоремы о взаимности возможных работ внешних сил: возможная работа i-й обобщённой силы (внешних сил i-го состояния) на перемещениях, вызванных j-й обобщённой силой (внешними силами j-го состояния), равна возможной работе j-й обобщённой силы (внешних сил j-го состояния) на перемещениях, вызванных i-й обобщённой силой (внешними силами i-го состояния). В строительной механике эта теорема носит имя итальянского учёного Энри-
ко Бетти (1823–1892).
Без доказательства отметим справедливость теоремы Бетти для внутренних сил
Wint,ij = Wint,ji,
т.е. возможная работа внутренних сил i-го состояния на деформациях j-го состояния равна возможной работе внутренних сил j-го состояния на деформациях i-го состояния.
Из теоремы Бетти, как частный случай, вытекают другие теоремы взаимности строительной механики, широко используемые в расчётах сооружений.
15.2. Теорема о взаимности перемещений
По-прежнему рассмотрим состояния i и j одного и того же сооружения (рис. 15.2). В состоянии i на него действует сила Fi = 1, а в состоянии j – сила Fj = 1. Зафиксируем возможные перемещения δij и δji, возникающие в состояниях i и j от единичных сил.
51 |
52 |

Для состояний сооружения i и j применим теорему о взаимности возможных работ внешних сил (см. п. 15.1, соотношение
(15.3)):
1 δij = 1 δji, или δij = δji. (15.4)
Соотношение (15.4) выражает содержание теоремы о взаимности перемещений: перемещение по направлению линии действия i-й единичной обобщённой силы, вызванное j-й единичной обобщённой силой, равно перемещению по направлению линии действия j-й обобщённой силы от i-й единичной обобщённой силы. В строительной механике эта теорема известна как теорема английского физика и механика Джейм-
са Максвелла (1831–1879).
Теорема о взаимности перемещений широко применяется в расчётах линейно деформируемых систем, в частности, в расчётах статически неопределимых систем методом сил, при построении линий влияния перемещений в стержневых сооружениях.
Выше был рассмотрен случай, когда в состоянии i и j сооружения действуют единичные сосредоточенные силы (рис. 15.2), т.е. силы, имеющие одинаковую природу и одинаковую размерность. На рис. 15.3 рассмотрена ситуация, когда в состоянии i на сооружение действует сосредоточенная сила Fi = 1, а состоянии j – сосредоточенный момент Mj = 1. Здесь же показаны и возможные перемещения δij и δji, вызывае-
мые упомянутыми силами Fi = 1 и Mj = 1. Кажущееся противоречие в размерностях перемещений δij и δji, равенство которых определено соотношением (15.4), отпадает, если мы примем во внимание, что каждое из этих перемещений является удельным
перемещением, т.е. что оно вызывается обобщённой силой, имеющей не произвольное, а единичное значение. Таким образом, размерность какого-либо удельного перемещения есть отношение размерности рассматриваемого обобщённого перемещения к размерности обобщённой силы, вызвавшей это перемещение. В случае, рассмотренном на рис. 15.3, имеем:
[δij] = кНсмсм = кН-1,[δji] = радкН = кН-1, т.е. оба перемещения имеют одинаковую размерность.
15.3. Теорема о взаимности реакций
Задана любая статически неопределимая стержневая система, например, однопролётная балка, защемлённая на левом конце и шарнирно опёртая на правом. В состоянии i этой балки угловой связи i заделки А зададим поворот по часовой стрелке на единицу (рис. 15.4,а), а в состоянии j
– правой опорной связи j линейное перемещение вверх
на единицу (рис. 15.4,б). Так как рассматриваемая система статически неопределима, то в её опорных связях, за исключением горизонтальной связи левой опоры А, от упомянутых выше кинематических воздействий возникнут реакции (см. п. 14.1 четырнадцатой лекции). Горизонтальная связь левой опоры А является абсолютно необходимой и в ней реакция от рассматриваемых смещений связей i и j будет равна нулю (НА = 0).
На рис. 15.4 в состояниях i и j показаны реакции в смещаемых связях, а именно: rii – реакция в i-й связи от её смещения на единицу, rjj – реакция в j-й связи от собственного смещения на единицу, rij – реакция в i-й угловой связи от перемещения j-й линейной связи на единицу, rji – реакция в j-й линейной связи от пе-
53 |
54 |

ремещения i-й угловой связи на единицу. К состояниям i и j применим теорему о взаимности возможных работ внешних сил (см.
соотношение (15.3) п. 15.1):
Wext,ij = Wext,ji.
В нашем случае:
Wext,ij = rii 0 + rji 1, |
Wext,ji = rjj 0 + rij 1, |
|
rji 1 = rij 1, |
или rij = rji . |
(15.5) |
Работа реакций остальных связей заданного сооружения (на рис. 15.4 – реакция вертикальной связи левой опоры А), не полу-
чивших перемещений, в выражения для возможных работ Wext,ij и Wext,ji не войдёт.
Равенство (15.5) является математическим представлением теоремы о взаимности реакций: реакция rij в i-й связи от перемещения j-й связи на единицу равна реакции rji в j-й связи от смещения j-й связи на единицу.
Принцип взаимности реакций, вытекающей из теоремы Бетти как частный случай, справедлив не только для реакций опорных связей различного типа, но и для реакций внутренних связей (изгибающих моментов, поперечных и продольных сил).
Как и в теореме о взаимности перемещений (см. п. 15.2), в рассматриваемой здесь теореме о взаимности реакций речь идёт об удельных реакциях, т.е. реакциях, вызванных единичными смещениями связей. Размерность удельной реакции определяется как отношение размерности рассматриваемой реакции к размерности перемещения, вызвавшего эту реакцию. Для удельных ре-
акций rij и rji, показанных на рис. 15.4, имеем: |
|
|||||
[rij] = |
кН см |
= кН, |
[rji] = |
кН |
= кН. |
|
см |
рад |
|||||
|
|
|
|
|||
В строительной механике теорема о взаимности реакций известна как первая теорема английского физика Джона Рэлея (1842–1919). Она широко применяется в расчётах статически неопределимых систем методом перемещений.
15.4. Теорема о взаимности реакций и перемещений
На рис. 15.5 показаны два состояния произвольной статически неопределимой системы (рамы). В первом состоянии (со-
стоянии i) на раму действует обобщённая сила Fi = 1. Опорная связь j получает единичное перемещение во втором состоянии (состоянии j). Введём обозначения: r'ji – реакция в j-й связи от обобщённой силы Fi = 1 в состоянии i, δ'ij – перемещение по направлению обобщённой силы Fi = 1 от смещения связи j на единицу в состоянии j. За положительное направление перемещения δ'ij примем перемещение, происходящее по направлению обобщённой силы Fi = 1, а за положительную реакцию r'ji реакцию, направление которой совпадает с перемещением j-й связи.
Для состояний i и j используем теорему о взаимности возможных работ внешних сил (см. соотношение (15.3) в п. 15.1).
Wext,ij = 1 δ'ij + r'ji 1.
Возможная работа Wext,ji внешних сил состояния j на перемещениях, вызываемых внешними силами состояния i, равна ну-
лю, так как в состоянии i перемещения по направлению опорных связей в том числе и по направлению связи j, отсутствуют, т.е.
Wext,ji = 0.
В соответствии с выражением (15.3) Wext,ij = Wext,ji, поэтому
1 δ'ij + r'ji 1 = 0, или r'ji = –δ'ji. (15.6)
Соотношение (15.6) является математической формулировкой теоремы о взаимности реакций и перемещений: реакция в j-й связи сооружения от обобщённой силы Fi = 1 с обратным знаком
55 |
56 |