

1.3.3 Физическая модель фмс привода рабочих органов машины пмг (путевой моторный гайковерт)
По кинематической схеме привода трехшпиндельного гайковерта машины ПМГ трудно судить о распределении масс и жесткостей. Поэтому для составления уравнений движения, необходимых для выяснения динамической характеристики привода, и проведения модельных испытаний необходимо механическую систему представить в виде эквивалентной расчетной схемы. Предусмотренные этой схемой динамические качества трансмиссии эквивалентны качествам реальной конструкции, то есть правильно отражают ее основные динамические характеристики.
При составлении эквивалентной расчетной схемы для любой механической системы неизбежна идеализация ее звеньев, связей и характера внешних сил. Условием динамической эквивалентности исходной и приведенной систем является равенство величин кинетической и потенциальной энергии до и после приведения. Таким образом, от многовалъной схемы можно перейти, например, к трех-, двух- или одновальной эквивалентным схемам, изменив при переходе инерционные массы и жесткости связей между ними так, чтобы ни кинематическая, ни потенциальная энергии системы остались без изменения.
Для определения энергетических параметров исследуемого привода рабочих органов машины ПМГ преобразуем ее кинематическую схему (рис.1.9) в динамическую, произведя расчет инерционных масс и податливостей всех вращающихся элементов.
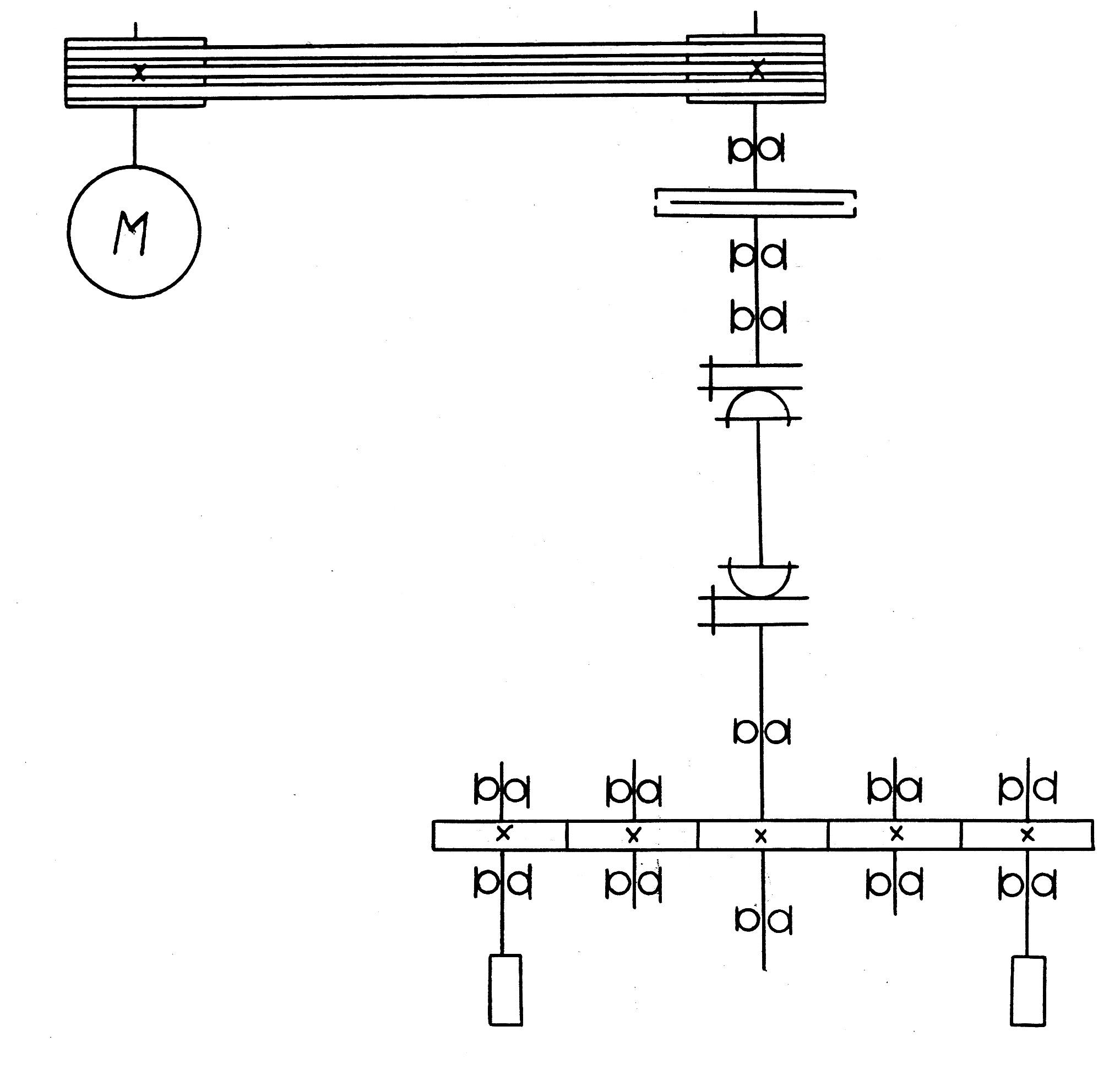
Рис.1.9 Кинематическая схема привода рабочих органов машины ПМГ
(трехшпиндельный гайковерт)
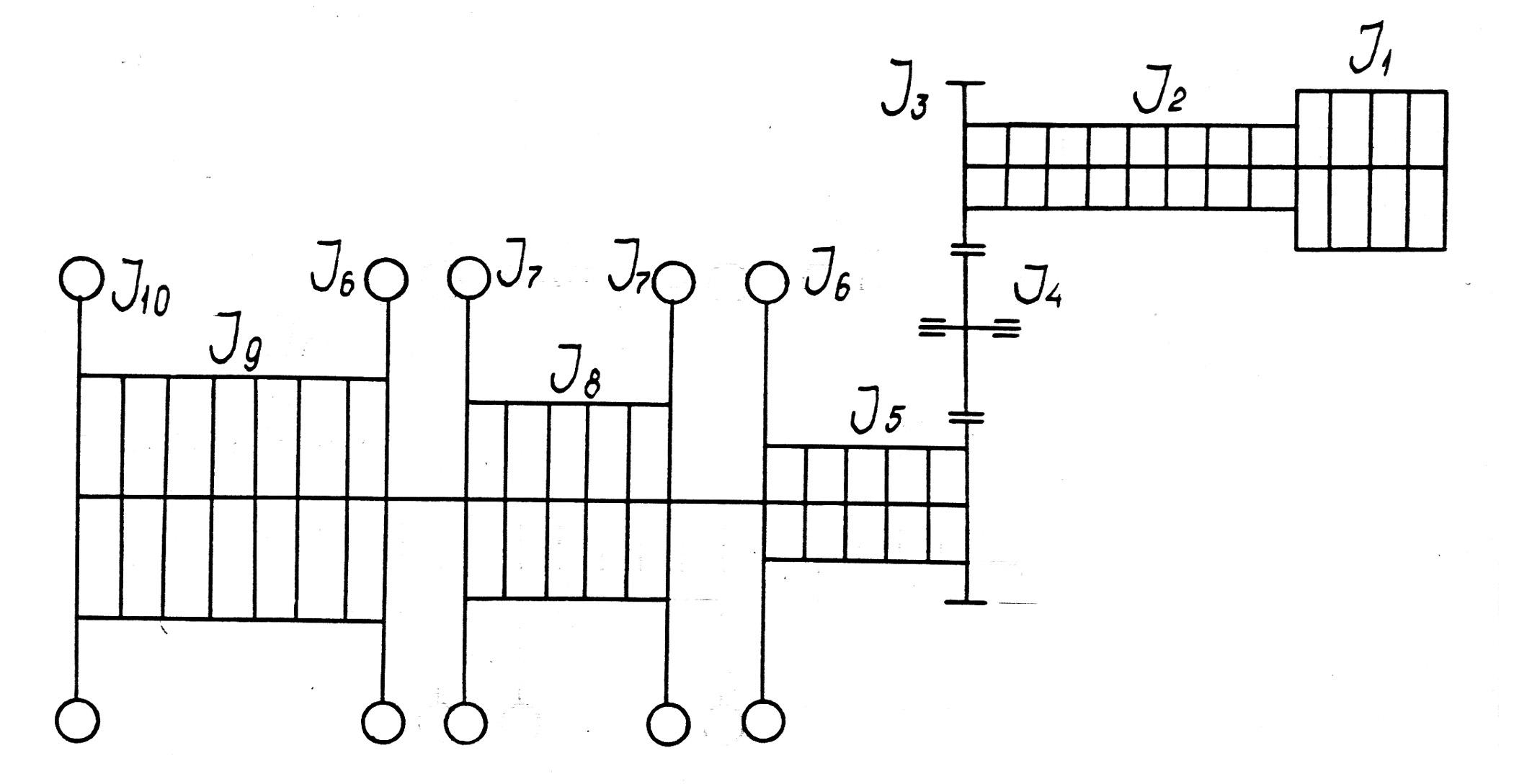
Рис.1.10 Расчетная динамическая схема привода рабочих органов
машины ПМГ
Вычисленные значения моментов инерции сосредоточенных масс и податливости связей между ними сведены в таблицу 1.1. Расчетная динамическая схема рассматриваемого участка трансмиссии гайковерта изображена на рис.1.10. Расчет энергетических параметров динамической схемы значительно упростится, если ее привести к одновальному виду и сократить до минимума число сосредоточенных масс.
Таблица 1.1
Моменты инерции и податливости элементов трансмиссии гайковерта
-
Номер
позиции
Момент инерции

Номер участка
Податливость

Обозначение
Численное значение
Обозначение
Численное значение
1
1,24
1
0,98
2
0,6
2
4,23
3
5,28

60,5
4
3,25
3 – 4
0,53
Окончание табл. 1.1
-
Номер
позиции
Момент инерции

Номер участка
Податливость

Обозначение
Численное значение
Обозначение
Численное значение
5
1,35
4 – 5
2,1
6
3,39
5
6,54
7
22,49
34,47
8
3,66
6 – 7
0,79
9

0,91
8

23,10
10
32,37

1,24
10,16

2,51
34,47
36,93
![]()
![]() За
центр приведения примем вал ведомой
полумуфты. На основании закона сохранения
кинетической и потенциальной энергий
динамической системы приведение
вращающихся масс и круговых податливостей
связей производится по формулам
За
центр приведения примем вал ведомой
полумуфты. На основании закона сохранения
кинетической и потенциальной энергий
динамической системы приведение
вращающихся масс и круговых податливостей
связей производится по формулам
![]()
![]() ,
,
![]() ,
,
где
![]() -
передаточное отношение от приводимой
массы до центра
-
передаточное отношение от приводимой
массы до центра
приведения;
![]() - приведенный момент инерции
- приведенный момент инерции![]() -ой массы;
-ой массы;
![]() - момент инерции приводимой массы;
- момент инерции приводимой массы;
![]() - приведенная податливость
- приведенная податливость![]() -ой связи;
-ой связи;
![]() - податливость приводимой связи.
- податливость приводимой связи.
Исходя из выбранного порядка модели ЭМС, упрощение производим до 6-ти массной эквивалентной расчетной схемы (рис.1.11).
Рис. 1.11 Шести массная расчетная схема
С учетом МКП динамического момента
инерции
![]() и круговой податливости
и круговой податливости![]() модель механической системы привода
будет иметь следующие параметры:
модель механической системы привода
будет иметь следующие параметры:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()