1.2 Упрощение эквивалентных расчетных схем
Даже несложная трансмиссия может иметь эквивалентный вал, состоящий из нескольких сосредоточенных маховиков и нескольких участков с распределёнными массами. Уравнения движения такой системы громоздки и, следовательно, решать их затруднительно.
Как правило, в машинах одновременно происходит несколько качественно различных процессов.
Например, в трансмиссии привода рабочего органа экскаватора для разработки мерзлоты могут одновременно протекать:
переходные динамические процессы, вызванные столкновением исполнительного органа (резцов) с твёрдыми включениями и резким увеличением сил сопротивления на рабочем органе;
вынужденные крутильные колебания в редукторе под действием периодических внешних сил в зубчатых передачах и исполнительном органе (например, вследствие непостоянства числа резцов, одновременно находящихся в контакте с забоем);
волновые (продольные) колебания в экскаваторе, вызываемые периодическими возмущениями, связанными с изменениями мгновенной скорости подъёма, опускания или заглубления ковша, а также внешними силами, изменение которых носит случайный характер.
В зависимости от характеристик двигателя, трансмиссии и исполнительного органа, а также от внешних условий тот или иной процесс приобретает преобладающее значение и вызывает наибольшие нагрузки. Поэтому для упрощения обычно выделяют отдельно интересующий процесс и изучают его, не учитывая остальные, если это не вносит существенных искажений в общую картину рассматриваемого явления. Данный метод называется принципом суперпозиций.
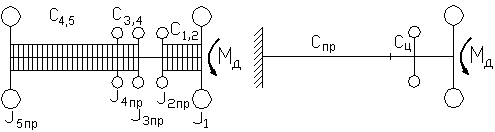
Самым первым упрощением эквивалентного вала является или пренебрежение массами связей, или распределение масс связей между соседними маховиками. В таком случае получается многомассная система с конечным числом масс. Но движение такой системы описывают лишь в том случае, если хотятнайти самые высокие частоты колебаний (например, при исследовании системы на возможностьрезонансов высших порядков).
На практике же, как правило, требуется знать приближённые значения нескольких низших собственных частот,а поэтому систему упрощают, сводя её к одно-, двух-, трёхмассным системам. Рассмотрим общую направленность в упрощении расчётных схем при определении нагрузок следующих динамических или переходных процессов.
Процесс запуска. При упрощении эквивалентного вала в целях получения расчётной схемы для определения усилий при запуске учитывается, что они определяются в первую очередь силами инерции исполнительного органа (разгоняемой массы), а также движущим усилием при запуске, непосредственно приложенным к массе вращающихся частей самого двигателя.
Поэтому при расчёте схема может иметь вид, показанный на рис. 1.3, где J1– приведенный момент инерции ротора двигателя;Jn– суммарный приведенный момент инерции рабочего органа и трансмиссии;
Рис. 1.3.Упрощённая
расчётная схема механизма запуска
трансмиссии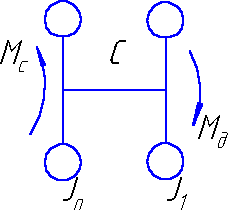
Процесс стопорения.Принимаем, что сила взаимодействия ковша с препятствием пропорциональна линейному перемещению ковша экскаватора, который встретился с этим препятствием. Тогда на расчётной схеме (рис. 1.4, а) препятствие можно изобразить участком с определённой приведенной жёсткостью
![]() , (1.13)
, (1.13)
а) б)
Рис.
1.4. Упрощённая расчётная схема механизма
стопорения трансмиссии: а –
эквивалентный вал привода рабочего
органа; б – эквивалентная расчетная
схема при стопорении рабочего органа
![]() - общее передаточное отношение от вала
двигателя до самого препятствия, одним
ковшом этот участок следует присоединить
к соседней сосредоточенной массе, другой
конец показать в виде заделки (рис. 1.4,
б).
- общее передаточное отношение от вала
двигателя до самого препятствия, одним
ковшом этот участок следует присоединить
к соседней сосредоточенной массе, другой
конец показать в виде заделки (рис. 1.4,
б).
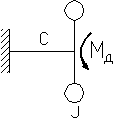
Как видим из рис. 1.4, б, все массы трансмиссии практически сосредоточены в одном месте, поэтому влияние отдельных узлов редуктора на закон движения всей упругой системы при стопорении рабочего органа невелико. Без существенных искажений их массу в некоторой пропорции можно присоединить к массе ротора, представив привод машины как систему с одной степенью свободы (рис. 1.5), где С– суммарная приведенная жёсткость препятствия и трансмиссии;J– суммарный приведенный момент инерции двигателя, трансмиссии и части рабочего органа.
В этой схеме не учтено влияние непостоянства передаточного отношения между двигателем и рабочим органом вследствие изменения радиуса набегания цепи. Как показывают расчёты процесса стопорения, учёт переменности радиуса звёздочки мало влияет на результат, но значительно усложняет решение.
Рис. 1.5.Привод
машины как система с одной степенью
свободы