

1 Построение физико-математической модели механической системы
Развитие современного машиностроения характеризуется увеличением мощности устанавливаемых на путевых и строительных машинах силовых установок и их рабочих скоростей.
Динамические нагрузки, возникающие в процессе выполнения данными машинами их служебных функций, не только соизмеримы с максимальными расчётными, но и превышают последние в 2…3 раза, а иногда в 10…15 раз. Динамические процессы (резонансные, вынужденные, фрикционные и другие колебания) приводят к скручиванию карданных валов, выкрашиванию зубьев зубчатых передач машин, ведут к снижению их общей надёжности. Учёт данных нагрузок в настоящее время в проектно-конструкторских бюро производится в основном с помощью эмпирических коэффициентов динамики, что приводит в некоторых случаях к завышению запасов прочности, а в других случаях – к недостаточной надёжности элементов трансмиссий и металлоконструкций.
С целью создания машин, обладающих минимальной металлоёмкостью и требуемой надёжностью, необходимо проводить наряду со статическими динамические расчёты.
Несмотря на большое разнообразие существующих конструкций путевых и строительных машин, динамические качества любой машины могут быть исследованы по общей методике, которая базируется на законах теоретической механики и теории колебаний.
1.1 Построение эквивалентных расчетных схем машин и механизмов
По кинематической схеме и чертежу машины трудно судить о распределении масс и жесткости в трансмиссии и других узлах. Составные части трансмиссии движутся с различными скоростями, передают разные крутящие моменты, жёсткости их сечений неодинаковы, неодинаковы и углы закручивания элементов на различных участках.
Поэтому для составления уравнений движения машину представляют в виде условной механической схемы, называемой приведенной эквивалентной расчётной схемой машины. Предусмотренные этой схемой динамические качества машины должны быть эквивалентны качествам реальной конструкции, т.е. правильно отражать её основные динамические характеристики. Допущенная на этом этапе ошибка сводит на нет всё решение задачи и его исследование.
При составлении эквивалентной расчётной схемы для любого динамического расчёта неизбежна идеализация самой машины, её звеньев, связей и характера внешних сил, ибо попытка описать движение элементов реальной машины с учётом всех особенностей её конструкции и условий режима загрузки приводит к чрезвычайно сложным системам уравнений, которые трудно решить, но ещё труднее проанализировать решение и сделать какие-либо практические выводы.
Основные допущения при динамических расчётах:
принимается, что любую машину можно представить в виде некоторой механической модели, состоящей из отдельных сосредоточенных масс, соединённых упругими связями;
упругие связи считаются невесомыми и характеризуются постоянным коэффициентом жёсткости (при более точных расчётах возможен учёт масс связей, а также непостоянства, нелинейности их жёсткости, если такое непостоянство имеется).
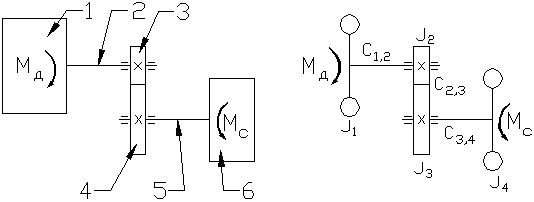
Рассмотрим составление эквивалентной расчётной схемы на примере машины, кинематическая схема которой представлена на рис. 1.1, а..
Если рабочий орган и двигатель изобразить в виде маховиков (под понятием “маховика J”,“массы J”понимается маховик (маховая масса) с моментом инерцииJ), то получим схему, показанную на рис. 1.1, б. Составлять уравнения движения для маховиковJ1иJ4, используя эту схему, также неудобно, ибо она включает в себя зубчатую передачу, а маховики вращаются с различными скоростями.
а б
Рис. 1.1. Кинематическая схема механизма:
1 – двигатель; 2 – вал двигателя; 3, 4 – зубчатая передача; 5 – вал рабочего органа; 6 – рабочий орган
Для удобства при составлении уравнений движения схему рис. 1.1, б приводят к виду, представленному на рис. 1.2, а, исключив зубчатую передачу и представив схему машины в виде одного вала, состоящего из ряда маховиков, соединённых упругими связями.

а б
Рис. 1.2. Эквивалентная приведенная схема механизма:
а – упрощенная расчетная схема; б – эквивалентный вал с диаграммой масс
Можно ли от схемы с несколькими валами перейти к одновальной схеме, не изменяя динамических качеств машины? Это оказывается возможным, если при переходе изменить массы и жёсткости системы таким образом, чтобы ни кинетическая энергия, ни потенциальная энергия системы при переходе не изменились. Полученная одновальная схема называется эквивалентной приведенной схемой, а жёсткости, массы и силы на этой схеме называютсяприведенными жесткостями, массами и силами.
Приведенная масса– это масса, которую нужно расположить в центре приведения, чтобы получить кинетическую энергию, равную кинетической энергии заданной массы при её прежнем расположении, если считать трансмиссию машины абсолютно жёсткой.
Приведенной жёсткостьюназывается момент (или усилие), который необходимо приложить к центру приведения, чтобы повернуть его на 1 радиан (или сдвинуть его на 1 метр) за счёт деформации данного участка.
Приведенная сила– это сила, которая будучи приложенной к массе, расположенной в центре приведения, оказывает на неё такое же воздействие, как и при реальном приложении приводимой силы.
Иногда эквивалентную приведенную схему изображают таким образом, что расстояния между сосредоточенными массами обратно пропорциональны приведенным жесткостям связей между ними, а на линиях связей откладывают прямоугольники, площади которых численно равны приведенным моментам инерции связей (если не пренебрегать массами связей). Такое изображение эквивалентной схемы называется эквивалентным валом с диаграммой масс(рис. 1.2, б) и даёт наглядное представление о распределении масс системы, соотношении приведенных жесткостей.