

Постановка задачи
Задачей данной курсовой работы является оценивание временного сдвига без обратной связи по решению для АМ в базовой полосе частот, не управляемое решениями.
Для этого необходимо смоделировать отслеживающую петлю в среде MatlabSimulinkи задать следующие параметры:
Длительность информационного символа
 = 0.5/20 мкс
= 0.5/20 мксИнформационная частота fинф = 40 МГц
Частота Доплера информационная Δfинф=200 Гц
Промежуточная частота fпч= 400МГц
Частота Доплера на промежуточной частоте Δfпч= 4 кГц
Частота несущей fнес= 3 ГГц
Результаты проделанной работы мы увидим анализируя показания осциллографа.
Описание характеристик моделируемой системы
Оценивание при синхронизации символов
В цифровой системе связи выход демодулятора должен периодически стробироваться со скоростью передачи символов в точно выбранных моментах
 ,
,
где T -
символьный интервал, а -
номинальное время задержки, которое
определяется временем распространения
сигнала от передатчика к приёмнику. Это
необходимо для того, чтобы восстановить
переданную информацию. Поскольку время
распространения от передатчика к
приемнику обычно неизвестно на приеме,
управление этим стробированием должно
осуществляться от принимаемого сигнала.
Время распространения переданного
сигнала влияет и на флуктуацию фазы
несущей, которую также следует оценить
в приемнике, если детектор когерентный.
-
номинальное время задержки, которое
определяется временем распространения
сигнала от передатчика к приёмнику. Это
необходимо для того, чтобы восстановить
переданную информацию. Поскольку время
распространения от передатчика к
приемнику обычно неизвестно на приеме,
управление этим стробированием должно
осуществляться от принимаемого сигнала.
Время распространения переданного
сигнала влияет и на флуктуацию фазы
несущей, которую также следует оценить
в приемнике, если детектор когерентный.
Чтобы выполнять это периодическое стробирование, требуется таймерный сигнал в приемнике. Процесс получения такого таймерного сигнала в приёмнике обычно называется тактовой синхронизацией (синхронизацией символов) или восстановлением отсчётов времени.
Восстановление отсчётов времени – одна из наиболее ответственных функций, которые выполняются в приёмнике синхронных цифровых систем связи. Отметим, что приёмник должен знать не только частоту (1/T), с которой стробируются выходы согласованных фильтров или корректоров, но также тот момент времени, в который необходимо взять отсчёты внутри каждого символьного интервала. Положение отсчётного момента внутри символьного интервала длительностью T называют фазой синхронизации.
Тактовую синхронизацию можно выполнить несколькими путями. В некоторых системах связи таймеры передатчика и приёмника синхронизированы по образцовому таймеру, который обеспечивает высокостабильную сетку времени. В этом случае приёмник должен оценить и скомпенсировать только относительное время задержки между переданным и принятыми сигналом. Такой метод может использоваться в системах радиосвязи, которые работают в очень низкочастотном диапазоне (ниже 30 КГц), где сигналы точного времени посылаются эталонной радиостанцией.
Другой метод для достижения синхронизации символов заключается в одновременной передаче передатчиком таймерной частоты, равной или кратной 1/T, вместе с информационным сигналом. Приёмник может просто использовать узкополосный фильтр, настроенный на переданную таймерную частоту, и таким образом извлечь таймерный сигнал для стробирования. Этот подход прост для применения. Здесь имеется, однако, несколько неудобств:
первое заключается в том, что передатчик должен отдать некоторую часть возможной мощности для передачи таймерного сигнала;
другое заключается в том, что некоторая малая часть доступной в канале полосы частот должна быть занята для передачи таймерного сигнала.
Несмотря на эти неудобства, этот метод часто используется в системах телефонной связи, которые используют большие полосы частот для передачи сигналов многих пользователей. В таком случае затраты на передачу таймерного сигнала делятся на многих пользователей. Посредством такого деления потери в мощности передатчика и полосе частот уменьшаются пропорционально числу пользователей.
Таймерный сигнал можно также извлечь из принимаемого информационного сигнала. Имеется определённое число различных методов, которые можно использовать в приёмнике, чтобы достичь самосинхронизации.
Максимально правдоподобная оценка параметра задержки τ
Начнём с получения МП оценки
времени задержки  .
Если сигнал является базовым AM, он может
быть представлен так:
.
Если сигнал является базовым AM, он может
быть представлен так:
r(t)=s(t;
 ,
,
(1)
где
s(t; .
.
(2)
Как в случае МП оценки фазы, мы различаем два типа оценивателей времени: оцениватель времени, управляемый решениями и не управляемый решениями. В первых информационные символы на выходе демодулятора рассматриваются как известная переданная последовательность. В этом случае логарифм функции правдоподобия имеет вид
(3)
Подставив (2) в (3), получим
(4)
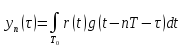
где  определено
так:
определено
так:
(5)
Необходимое условие, при
котором  является
МП оценкой, имеет вид
является
МП оценкой, имеет вид

(6)
Результат (6) подсказывает
реализацию посредством отслеживающей
петли, показанной на рисунке 1. 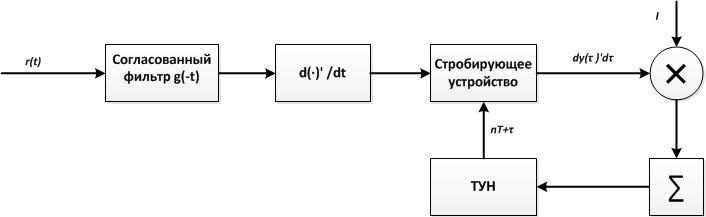
Рисунок 1. МП оценивание параметра задержки, управляемое решениями, для базового сигнала АМ
Необходимо отметить, что
суммирование в петле обеспечивается
петлевым фильтром, полоса которого
управляется длиной скользящего окна
при суммировании. Выход петлевого
фильтра подаётся на таймер, управляемый
напряжением (ТУН), или на генератор,
управляемый напряжением, который
управляет интервалом стробирования на
входе петли. Поскольку детектируемая
информационная последовательность
{ } используется
при оценке
} используется
при оценке  ,
оценка оказывается управляемой решениями.
,
оценка оказывается управляемой решениями.
Описанную выше технику для МП оценивания параметра задержки базового сигнала AM можно распространить на форматы модулированных сигналов, таких как КАМ и ФМ непосредственно, если иметь дело с эквивалентной низкочастотной формой сигналов. Таким образом, проблема МП оценки символьной синхронизации для несущих сигналов очень похожа на формулировку проблемы для базовых сигналов AM.
Оценивание параметра задержки, не управляемое решениями
Оценку параметра задержки,
не управляемую решениями, можно получить
путём усреднения отношения правдоподобия
 с
учётом ФПВ информационных символов для
получения
с
учётом ФПВ информационных символов для
получения  .
Затем
.
Затем
 или
или 
(7)
дифференцируется по  для
получения условия для МП оценки
для
получения условия для МП оценки  .
.
В случае двоичного (базового)
AM, где  с
равной вероятностью, усреднение по
данным дает результат
с
равной вероятностью, усреднение по
данным дает результат

(8)
как раз такой, как в случае
оценивания фазы. Поскольку  для
малых x,
квадратичная аппроксимация
для
малых x,
квадратичная аппроксимация
(9)
предназначается для низких
отношений сигнал/шум. Для многоуровневой
AM мы можем аппроксимировать статистику
информационных символов
 гауссовской ФПВ с нулевым средним и
единичной дисперсией. Когда мы усредняем
гауссовской ФПВ с нулевым средним и
единичной дисперсией. Когда мы усредняем  по
гауссовской ФПВ, то получаем
по
гауссовской ФПВ, то получаем
 идентично
идентично  .
Следовательно, оценку
.
Следовательно, оценку  можно
получить дифференцированием (9). Результат
является аппроксимацией для МП оценки
времени задержки без управления
решениями. Производная от (9) приводит
к результату
можно
получить дифференцированием (9). Результат
является аппроксимацией для МП оценки
времени задержки без управления
решениями. Производная от (9) приводит
к результату

(10)
где  определено
так:
определено
так:
(11)
Реализация отслеживающей
петли, основанная на вычислении
производной  согласно
(4), показана на рисунке 2.
согласно
(4), показана на рисунке 2.
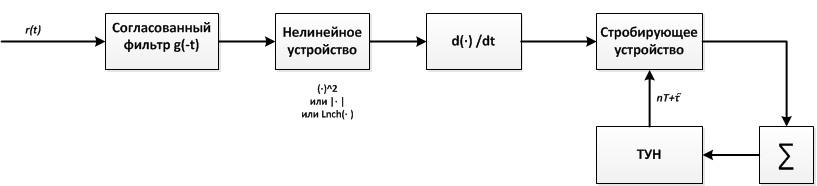
Рисунок 2. МП оценивание времени задержки для базового сигнала АМ, не управляемое решениями
Альтернативно реализация отслеживающей петли, основанная на (10), иллюстрируется на рисунке 3. В обеих структурах мы видим, что суммирование служит петлевым фильтром, который управляет ТУН. Интересно отметить сходство таймерной петли на рисунке 3 и петли Костаса на рисунке 4 для оценивания фазы.
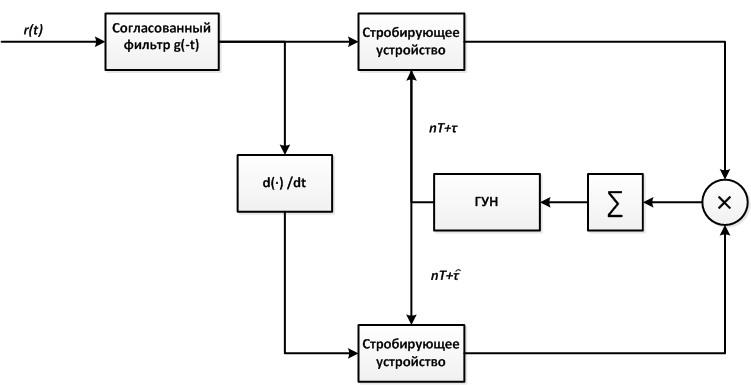
Рисунок 3. Оценивание времени сдвига без обратной связи по решению для АМ в базовой полосе частот
Петля Костаса
На рисунке 4 иллюстрируется метод
восстановления фазированной несущей
для двухполосной системы с подавленной
несущей. Эта схема была предложена
Костасом (1956) и называется петлей Костаса.
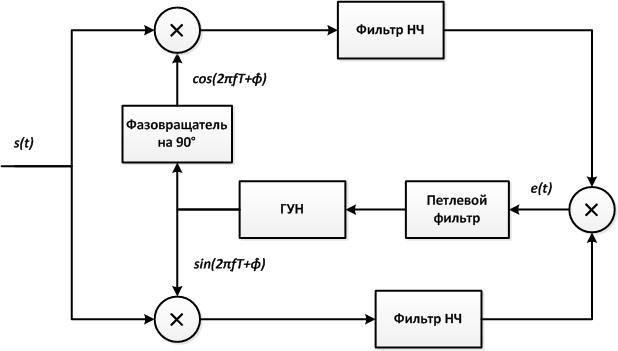
Рисунок 4. Блок-схема петли Костаса
Принимаемый сигнал умножается на
 и
и ,
которые являются выходами ГУН. Получаем
два произведения:
,
которые являются выходами ГУН. Получаем
два произведения:

+ слагаемое с двойной частотой,

+ слагаемое с двойной частотой,
где фазовая ошибка
 .
Слагаемое с удвоенной частотой устраняется
фильтрами низких частот, расположенными
после умножителей.
.
Слагаемое с удвоенной частотой устраняется
фильтрами низких частот, расположенными
после умножителей.
Сигнал ошибки генерируется путем умножения двух выходов фильтров низких частот. Таким образом,

Этот сигнал ошибки фильтруется петлевым фильтром, выход которого управляет ГУН.
Заметим, что сигнал ошибки на входе
петлевого фильтра состоит из желательного
слагаемого
 и слагаемых, которые содержат
сигнал×шум и шум×шум. Эти слагаемые
похожи на две шумовые слагаемые на входе
ФЗП при использовании метода
квадратирования.
и слагаемых, которые содержат
сигнал×шум и шум×шум. Эти слагаемые
похожи на две шумовые слагаемые на входе
ФЗП при использовании метода
квадратирования.
Интересно заметить, что оптимальный ФНЧ для подавления слагаемых с двойной частотой в петле Костаса – это фильтр, согласованный с сигнальным импульсом информационной последовательности. Если согласованные фильтры используются как ФНЧ, их выходы можно стробировать с битовой скоростью в конце каждого сигнального интервала, а отсчёты в дискретных точках времени могут быть использованы для правления в петле. Использование согласованного фильтра ведет к меньшему шуму в петле.
В заключение заметим, что, как и в
квадратичном ФЗП, выход ГУН в петле
Костаса в неоднозначность фазы на
 ,что делает необходимым предварительное
дифференциальное кодирование на передаче
и дифференциальное декодирование после
детектора.
,что делает необходимым предварительное
дифференциальное кодирование на передаче
и дифференциальное декодирование после
детектора.