

Include "t210.Inc";
SUBDESIGN RADAR
( CLK,TP1,TR1 :INPUT;
Q0[3..0],Q1[3..0],Q2[3..0],P:OUTPUT;)
Variable
T210A,T210B,T210C: T210;
TS:DFF;
BEGIN
TS.D=VCC;
TS.CLK=TP1;
TS.CLRN=!TR1;
T210A.CLK=CLK&TS.Q;
T210B.CLK=CLK&TS.Q;
T210C.CLK=CLK&TS.Q;
T210A.RN=VCC;
T210B.RN=VCC;
T210C.RN=VCC;
Q0[]=T210A.Q[];
Q1[]=T210B.Q[];
Q2[]=T210C.Q[];
T210A.B=VCC;
T210B.B=T210A.P;
T210C.B=T210B.P & T210A.P;
P=T210B.P;
END;
Схема определения расстояния до объекта расхода имеет следующие входные и выходные сигналы
CLC – вход эталонной частоты,
TP1 – вход выходного сигнала радара,
TR1 – вход отраженного сигнала.
Q0[3..0] - выход единиц расстояния в метрах;
Q1[3..0] - выход десятком единиц расстояния в метрах;
Q2[3..0] - выход сотен единиц расстояния в метрах;
P – контрольный сигнал переноса.
В данном блоке в качестве однотетрадного двоично-десятичного счетчика используется модуль T210, описание которого приведено ниже.
Для этого модуля предварительно подготовлен стандартный INCLUDE файл "T210.INC".
SUBDESIGN T210
( CLK, RN, B :INPUT;
P,Q[3..0]:OUTPUT;
)
Variable
RG[3..0],RP: DFF;
BEGIN
RG[].CLK=CLK&B;
RP.CLK=!CLK;
RG[].CLRN=RN;
CASE RG[].Q IS
WHEN 9 => RG[].D=0; RP.D=B"1";
WHEN OTHERS => RG[].D=RG[].Q+1; RP.D=B"0";
END CASE;
Q[] = RG[].Q;
P=RP.Q;
END;
Счетчик имеет следующие входные и выходные сигналы:
CLK – тактовый вход;
RN - вход сброса по «0»;
B - вход переноса из младшей тетрады;
P - выход переноса в старшую тетраду;
Q[3..0]- выход счетчика.
Счётчик работает по классической схеме. Когда он досчитывает до кода «9» в оператореCASE организуется обнуление счетчика на следующем такте. В том же операторе организуется появление на один такт сигнала логической единицы на выходе переноса старшего разряда, который формируется на выходе триггера переноса RP.
Временная диаграмма работы радара в режиме определения расстояния до объекта приведена на рис 4.4.2
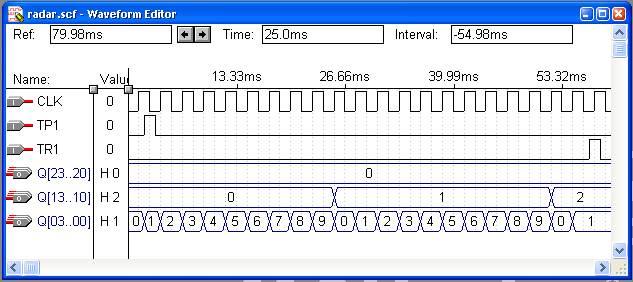
Рис 4.4.2. Временная диаграмма работы радара
На примере, приведенном на рис 4.4.2. опорная тактовая частота гидролокатора выбрана равной 1.5 кГц, что соответствует периоду 26.66 миллисекунд .Это позволило легко рассчитывать расстояние до объекта.
В данном конкретном примере оно равно 21 метру.
Определение скорости объекта.
Возможны два подхода к построению аппаратуры, определяющей расстояние до объекта.
Первый поход основан на том, что при движении объекта по направлению к локатору или его удалению от него, расстояние до объекта изменяется от импульса к импульсу локатора. Если период следования импульсов локатора равен t, расстояние определённое по первому импульсу равноS1, а по второму соответственноS2то скорость объектаVможно определить по простой формуле:
V=(S1-S2)/t [3]
При всей простоте реализация вычислений по этой формуле приводит к необходимости построения вычитателя и делителя, что является достаточно громоздкой задачей. Кроме того при таком подходе требуется подача, как минимум двух импульсов на объект, что может быть достаточно неудобным, если локатор работает в режиме обзора или сканирования пространства.
Второй подход основан на использовании эффекта Доплера. При таком подходе анализируется длительность импульса отраженного сигнала. Если длительность отраженного сигнала меньше, чем испускаемого то объект приближается, если больше – то удаляется, причём чем больше изменение длительности импульса, тем больше скорость объекта.
Пусть объект движется со скоростьюVoотносительно локатора (будем считать что объект либо приближается , либо удаляется ). Тогда для времен прихода отраженного сигналаTr1иTr2(см рисунок 4.4.1), справедливы выражения:
Tr1=2S/(Vs+Vo)
Tr2=T+2 (S-VoT)/(Vs+Vo),
где Vsскорость распространения волн в среде аT- длительность испускаемого импульса.
Отсюда можно получить выражение для длительности отраженного импульса:
T= Tr2 - Tr1 = T-2 VoT/(Vs+Vo) = T(1-2Vo/(Vs+Vo))
Отсюда легко получить зависимость скорости объекта Voот длительности отраженного импульсаT.
Vo=Vs(T-T )/(T+T) [4]
Из полученного выражения видно, что если T=T, то скорость объекта равна нулю. ЕслиTравно бесконечности, то объект движется со скоростью–Vs, т.е. удаляется от локатора со скоростью распространения волн.
И хотя выражение [4] ничуть не проще формулы [3], оно позволяет строить очень удобные для локационной техники семы работы, поскольку вся информации об объекте определяется исходя из анализа одного отражённого импульса.
Несомненным преимуществом локационных схем, построенных на основе формулы [4] является то, что она позволяет обрабатывать одновременно импульсы от нескольких объектов, находящихся на различном расстоянии от локатора, если только их отметки не сливаются.
Рассмотрим структурную схему локатора скорости, построенную на базе формулы [4]. Эта схема приведена на рисунке 4.4.3
Счётчик
длительности испускаемого импульса Сумматор T T





Делитель T+T T-T


C


 LC
LC


Счётчик
длительности отражённого импульса Вычитатель T T







Умножитель (T+T)/(
T-T) Vs
Схема
управления

 Vs
Vs

Vo
Рис 4.4.3. Структурная схему локатора скорости, построенная на базе
формулы [4].
Как видно из рисунка 4.4.3. представленная схема напрямую реализует формулу [4], для чего в неё введены вычитатель, сумматор, делитель и умножитель. Отсчет длительности импульсов в схеме ведётся с помощью счётчиков длительности прямого и отраженного сигнала. Схема управления нужна для организации правильной работы счетчиков. Она обеспечивает их запуск в момент прихода положительного фронта импульсов и останов в момент прихода отрицательного.
Данная схема обладает очень высоким быстродействием и может обрабатывать информацию о нескольких отраженных сигналах, если они не сливаются в один.