

Лекции по теории механизмов и машин
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Национальный исследовательский ядерный университет «МИФИ» Технологический институт-филиал НИЯУ МИФИ
КАФЕДРА ОБЩЕИНЖЕНЕРНЫХ ДИСЦИПЛИН
КОНСПЕКТ ЛЕКЦИЙ по дисциплине
«ТЕОРИЯ МЕХАНИЗМОВ И МАШИН»
Зав. кафедрой ОИД |
Е.В. Козлова |
Лесной 2011
1
Лекция 1
Введение
Теория механизмов и машин (механика машин) представляет собой науку, состоящую из двух дисциплин: теории механизмов и теории машин.
Изучение механики машин начинается с раздела теории механизмов, т. к. только изучив свойства отдельных механизмов или их видов, можно переходить к изучению совокупности механизмов, образующих машину, т.е. к теории машин.
ЗАДАЧИ ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Теория механизмов и машин – это наука, рассматривающая две основные задачи:
1.анализ механизмов и машин;
2.синтез (создание, проектирование) механизмов и машин.
Анализ механизмов можно разбить на две части:
1.структурный и кинематический анализ;
2.динамический анализ.
Цель структурного анализа – изучение строения механизма машин
Цель кинематического анализа – исследование движения механизмов или машин с точки зрения их геометрии без учета сил, вызывающих это движение.
Цель динамического анализа – исследование движения тел, механизмов с учетом сил,
действующих на тела, и сил, возникающих в процессе движения.
Задачей синтеза механизмов является проектирование, создание новых механизмов и машин с заданными кинематическими характеристиками и динамическими свойствами.
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
МАШИНА
Машина – это техническое устройство, совершающее механическое движение с целью преобразование энергии, материалов и информации.
Цель создания машины – облегчить труд человека, повысить производительность
труда.
Классификация машин (по их функциональному назначению)
I.Энергетические машины – машины, предназначенные для преобразования какого-либо вида энергии в механическую работу (и наоборот):
машины – двигатели (двигатели внутреннего сгорания), предназначенные для преобразования энергии (тепловой) в механическую работу;
2

машины генераторы, предназначенные для преобразования энергии,
потребляемой извне.
II. Рабочие машины – машины, предназначенные для преобразования материалов:
технологические – это рабочая машина, в которой преобразование материала заключается в изменении формы, свойств, положения объекта (токарные,
фрезерные станки, металлорежущие станки, ковочные машины, прессы и т.д.);
транспортные – это рабочие машины предназначенные только для
перемещения объектов (живых и неживых).
III.Информационные машины – машины, предназначенные для преобразования информации:
математические – преобразуют информацию, получаемую в виде символов,
чисел или алгоритмов;
контрольно-управляющие и контрольно-измерительные (например, с помощью
датчиков осуществляется контроль размеров детали при ее обработке;
выполняется сортировка деталей по их размерам или другим показателям).
IV. Кибернетические – машины, имитирующие или заменяющие человека и имеющие элементы искусственного интеллекта (роботы, манипуляторы, в
медицине, промышленности).
Машины состоят из механизмов (зубчатые, кулачковые, рычажные механизмы).
МЕХАНИЗМ
Механизм – это устройство (совокупность материальных тел), предназначенное для преобразования движения одного или нескольких звеньев в требуемое движение других звеньев:
Вращательное на входе (звено 1 –
кривошип) во возвратно-вращательное на выходе (звено 3 – коромысло): шарнирно
– рычажные механизмы в прессах,
ковочных машинах, прокатных станах
Рисунок 1
Вращательное на входе (звено 1 –
кривошип) во возвратно-поступательное на выходе (звено 3 – ползун):
кривошипно-ползунные механизмы
двигателей внутреннего сгорания, |
|
компрессоров, насосов |
Рисунок 2 |
3 |
|

Классификация механизмов
I.По виду звеньев:
Механизм может состоять из твердых, жидких и газообразных тел. Отсюда,
механизмы могут быть:
пневматические,
гидравлические,
вакуумные и т.п.
II. По функциональному назначению:
механизмы двигателей и преобразователей;
передаточные механизмы, которые служат для передачи движения от двигателя к технологической машине или исполнительному механизму
(зубчатые, червячные, реечные, цепные передачи);
исполнительные механизмы – механизмы, которые непосредственно воздействуют на объект (например, механизм снятия стружки на токарном станке);
механизмы подачи (например, механизм подачи стола, механизм подачи детали);
механизмы управления, контроля и регулирования.
III.По типу звеньев:
кривошипно-шатунный (звено AB – кривошип, звено BC – шатун):
Рисунок 3
кривошипно-коромысловый (звено AB – кривошип, звено CD – коромысло):
Рисунок 4
4

кривошипно-ползунный (звено AB – кривошип, звено 3 – ползун):
Рисунок 5
кривошипно-кулисный (звено ОА – кривошип, звено О1B – кулиса):
Рисунок 6
кулачковый (звено 1 – кулачок):
Рисунок 7
зубчатые механизмы (звенья 1, 2-3, 4, 5 – цилиндрические зубчатые колеса):
Рисунок 8
5

IV. По характеру движения:
приближенный прямолинейно-направляющий механизм (траектория движения точки О звена ВС на некотором участке– отрезок прямой)
Рисунок 9
механизм с выстоями (фазы работы кулачкового механизма – фаза дальнего выстоя, фаза ближнего стояния, в которых толкатель 2 неподвижен):
Рисунок 10
точным прямолинейно-направляющим механизмом
синусный механизм (движение прямолинейно-движущейся кулисы описывается по закону синусоиды):
Рисунок 11
6

Механизмы состоят из звеньев.
ЗВЕНО
Звеном называется одна деталь или несколько деталей, связанных между собой жестко (например, шатун) или не имеющих жесткой связи, но движущихся как одно целое
(например, ленточный конвейер и брус).
брус
лента Рисунок 12
Звенья, соединяясь между собой образуют кинематические пары.
КИНЕМАТИЧЕСКАЯ ПАРА
Кинематическая пара – это подвижное соединение звеньев, позволяющее одному звену совершать движения относительно другого (причем, движение может быть совсем маленьким).
Кинематическая пара – это подвижное соединение двух соприкасающихся звеньев.
Элементами пары, по которым одно звено соприкасается с другим звеном, могут
быть:
поверхность (вал-втулка);
линия (зубчатое зацепление);
точка (кулачок-толкатель).
Кинематические пары, в которых звенья соприкасаются по линии или в точке,
называются высшими парами (кулачковый механизм, зубчатое зацепление, мальтийский механизм).
Кинематические пары, в которых звенья соприкасаются по поверхности, называются
низшими (кривошипно-ползунный, винтовой механизм и др.).
Звенья, соединяясь между собой в кинематические пары, образуют кинематические
цепи.
КИНЕМАТИЧЕСКАЯ ЦЕПЬ
Кинематическая цепь – это связанная система звеньев, образующих между собой кинематические пары.
Кинематические цепи делят на простые и сложные.
Простая кинематическая цепь – это цепь, каждое звено которой входит не более чем в две кинематические пары.
Сложная кинематическая цепь – это цепь, в которой есть хотя бы одно звено, которое входит более чем в две кинематические пары.
7

Замкнутая кинематическая цепь – это цепь, не имеющая свободных элементов.
Незамкнутая кинематическая цепь – это цепь, в которой есть свободные элементы.
Примеры кинематических цепей:
Простая незамкнутая цепь
Простая замкнутая цепь
Сложная замкнутая цепь (свободных элементов нет)
звено 1 – жесткий треугольник (базовое звено)
сложная незамкнутая (открытая) цепь
Таким образом, в основе всякого механизма лежит кинематическая цепь, но не всякая кинематическая цепь является механизмом.
В механизме есть подвижные и неподвижные звенья.
Среди подвижных звеньев в механизме различают:
входное звено (или «вход») – движение которому задается от двигателя;
выходное звено (или «выход») – звено, совершающее требуемое движение, для
получения которого создан механизм.
Иногда при решении задач различают звенья – ведущее и ведомое.
Начальное звено – это звено, для которого известна обобщенная координата, т.е.
задан закон движения начального звена.
8
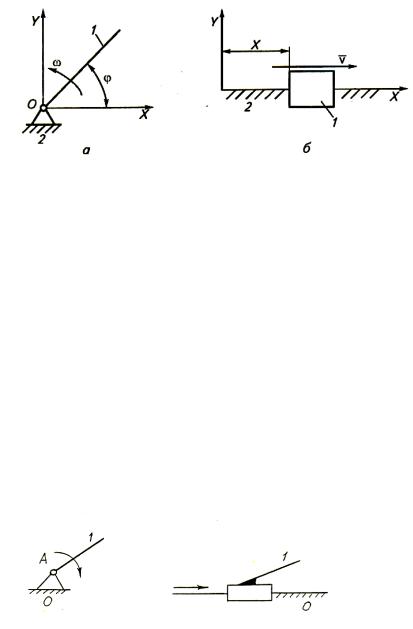
Обобщенные координаты:
Рисунок 13
– угловая координата для кривошипа (рисунок 13,а); x – линейная координата для ползуна (рисунок 13,б).
Имея обобщенную координату начального звена, можно установить законы движения других звеньев. За начальное звено может быть принято любое звено, для которого при анализе механизма задаются (известны) кинетические характеристики (скорость, ускорения).
Чаще всего, начальное звено совпадает с входом (но не всегда).
ЗВЕНЬЯ. ОСНОВНЫЕ ТИПЫ ЗВЕНЬЕВ ПО ГОСТ 2.770
Стойка
На кинематической схеме неподвижное звено называется стойкой и обозначается цифрой 0 .
Рисунок 14 Рисунок15
В качестве неподвижного звена (стойки) в самолетах, автомобилях принимаются звенья, которые неизменно соединены с корпусом машины, самолета.
Число неподвижных звеньев в механизме равно 1.
Кривошип
Кривошип – звено, связанное со стойкой и совершающее при вращении полный оборот.
На рисунке 14 кривошип обозначен цифрой 1.
Если кривошип – начальное звено, то для него указывается кинематическая характеристика 1 или обобщенная угловая координата 1 .
9

Ползун
Ползун – звено, которое совершает прямолинейное возвратно-поступательное движение и образует с другим звеном поступательную пару (входит только в низшие пары).
На рисунке 15 ползун обозначен цифрой 1.
Если ползун – ведущее звено, то для него указывается кинематическая характеристика
1 или обобщенная линейная координата x .
Коромысло
Коромысло – звено, которое совершает при вращении неполный оборот.
На рисунке 17 коромысло обозначено цифрой 4.
Шатун
Шатун – звено, которое образует вращательные пары только с подвижными звеньями и совершает плоскопараллельное движение.
На рисунках 3 и 5 шатун обозначен цифрой 2.
Кулиса
Кулиса – это звено с пазом, по которому перемещается ползун (кулисный камень).
Кулиса – это подвижная направляющая для ползуна. На рисунке 5 кулиса,
обозначенная цифрой 3, – это звено, вращающееся вокруг неподвижной оси и образующее с ползуном 2 поступательную пару.
Кулачок
Кулачок – звено, имющее сложный профиль, от которого зависит закон движения ведомого звена.
В качестве ведомого звена может быть толкатель (на рисунке 16 звено 2) или коромысло (на рисунке 17 звено 4).
Рисунок 16 |
Рисунок 17 |
10