

Лекции по теории механизмов и машин
.pdfРисунок 5
61

Отсюда, |
|
|
|
|
F |
|
|
Fрез h1 FИ 5 h1 FИ 4 h2 G4 h3 G2 h5 FИ 3 h6 G3 h7 F'И 3 h8 |
|
|
y |
|
h4 |
|
|
|
|
|
100 96 104 96 72.6 94 230 26 230 93 66.8 47 415 15 30.8 101
110
600 H,
где Fрез = 100 Н; Fu5 = 104 Н; Fи4 = 72.6 Н; G4 = 230 H; G2 =230 H; Fи3 = 66.8 H; G3 = 415H;
F = 30.8 H;
И 3
h1 = 96 мм; h2 = 94 мм; h3 = 26 мм; h4 = 110 мм; h5 = 93 мм; h6 = 47 мм; h7 = 15 мм; h8 = 101
мм.
Если при решении уравнения (11) Fу получится со знаком плюс, то сделанное предположение о направлении уравновешивающей силы было правильным. Если же Fу
получится со знаком минус, то выбранное направление Fу следует изменить на противоположное.
62
Лекция 9
ДИНАМИКА МАШИН
Динамика машин решает две основные задачи:
динамический анализ,
динамический синтез.
Задачи динамического анализа – это определение движения звеньев механизма под действием заданной системы сил либо определение системы сил по заданному движению звеньев.
Задачей динамического синтеза является проектирование новых механизмов с заданными динамическими свойствами.
При решении задач динамики:
устанавливают оптимальный режим движения машины;
определяют коэффициент полезного действия;
изучают способы регулирования скорости машины.
ДИНАМИЧЕСКАЯ МОДЕЛЬ МЕХАНИЗМА. ПРИВЕДЕНИЕ СИЛ И МАСС
При решении некоторых задач динамики (определение истинной скорости машины или приблизительной мощности двигателя) рассматривают не весь сложный многозвенный механизм, а его динамическую модель, которая должна быть эквивалентна заданному механизму. Для этого весь заданный механизм заменяют условно одним начальным звеном,
связанным со стойкой, при этом обязательно должно выполняться условие
,
где 1 - угловая скорость начального звена заданного механизма.
M - угловая скорость динамической модели.
Построим динамическую модель механизма
Динамическая модель механизма состоит из звена приведения (рисунок 1). За звено
приведения принимают начальное звено – это звено 1 длиной П . На этом звене выбирают точку приведения (точка В), в которой сосредоточена приведенная масса mП (всех звеньев) и
приложена перпендикулярно звену приведения приведенная сила FП (обобщенная нагрузка).
Так как звено приведения имеет приведенную массу, то оно обладает инертностью, которая характеризуется приведенным моментом инерции J П . Приведенная силу создает приведенный момент M П :
M П FП П
63
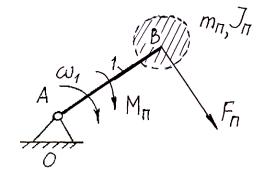
Рисунок 1
Приведенная масса
Критерием для определения приведенной массы является кинетическая энергия T .
Приведенной массой механизма с одной степенью свободы называется такая условная масса, которая будучи сосредоточенной в точке приведения обладает кинетической энергией, равной сумме кинетических энергий всех звеньев механизма:
|
|
|
|
T |
mПVП2 |
|
, |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где mП |
- приведенная масса механизма, кг ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
VП - скорость точки В звена приведения, м / с ; |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
T - кинетическая энергия звена приведения, |
кг м2 / с2 ; |
дж . |
|||||||||||||||||||||||
|
Из формулы (1) следует, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mП |
|
2Т |
|
2 Тi |
. |
|
|
|
|
|
|||||||||||||
|
|
V |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
V |
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
Кинетическую энергию Ti при поступательном движении звена i запишем в виде: |
||||||||||||||||||||||||
|
|
|
|
|
|
T |
m |
Si |
V |
2 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
i |
|
, |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где mi |
масса звена i , кг ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V скорость центра масс звена i , |
|
м |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
i |
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Кинетическая энергия Ti при вращательном движении звена i запишем в виде: |
||||||||||||||||||||||||
|
|
J 2 |
|
|
|
|
|
|
|
|
|
|
|
mV 2 |
J |
S |
2 |
||||||||
|
T |
|
A i |
|
или T |
|
|
|
S |
|
|
|
, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
i |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
если центр масс S совпадает с осью вращения, то |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
J |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
T |
|
|
Si |
|
i |
, |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
i |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(1)
(2)
где J Si |
осевой момент инерции звена |
i вокруг |
оси, |
проходящей через |
центр масс, |
|||||||||
перпендикулярной плоскости движения звена i , |
кг м2 ; |
|
|
|
|
|
|
|||||||
i |
угловая скорость звена i , |
c 1 . |
|
|
|
|
|
|
|
|
|
|
||
Таким образом, кинетическую энергию всех звеньев механизма можно представить в |
||||||||||||||
виде суммы энергий: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m V |
2 |
|
J Si i2 |
n |
m V |
2 |
|
J Si i2 |
|
|
||
|
T |
i i |
|
|
|
|
|
i i |
|
|
|
. |
(3) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
2 |
|
|
2 |
i 1 |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя значение T из формулы (3) в формулу (1), определяют значение mП .
Приведенный момент инерции
Приведенным моментом инерции называется такой условный момент инерции,
которым обладает приведенная масса.
Если кинетическую энергию звена T приведения, совершающего вращательное движение, записать как
T |
J |
П |
2 |
|
|
|
|||
|
П |
, |
(4) |
||||||
|
|
2 |
|
||||||
|
|
|
|
|
|
|
|||
где J П - приведенный момент инерции звена приведения, кг м2 ; |
|||||||||
П - угловая скорость звена приведения, |
|
с 1 . |
|
|
|
||||
Из формулы (4) следует, что |
|
|
|
|
|
|
|
|
|
J П |
|
|
2Т |
|
|
2 Ti |
. |
||
|
2 |
|
|||||||
|
|
|
|
|
2 |
||||
|
|
|
|
|
П |
|
1 |
|
|
Установим связь между mП и J П . Для этого приравняем значения T , полученные по формулам (1) и (4)
m |
П |
V 2 |
|
J |
П |
2 |
|
|
П |
|
П |
, |
|||
|
|
2 |
|
|
2 |
||
|
|
|
|
|
|
||
mП VП2 |
J П П2 |
||||||
Так как VП П П , получим
J П mП 2П .
Таким образом, приведенным моментом инерции механизма с одной степенью свободы называется условный момент инерции, которым должно обладать звено приведения относительно оси его вращения, чтобы кинетическая энергия этого звена равнялась сумме кинетических энергий всех звеньев механизма.
65

Приведенная сила
Критерием для определения приведенной силы выбираем мощность P .
Приведенная сила – это такая сила, которая будучи приложенной к точке
приведения, развивает мощность, равную сумме мощностей всех силовых факторов (силы,
моменты), приложенных к звеньям механизма.
|
P FП VП , |
(5) |
|||||
где |
FП - приведенная сила, Н; |
|
|
|
|
|
|
|
VП - скорость точки В звена приведения, м / с ; |
|
|||||
|
P - мощность звена приведения, Н м / с , Вт . |
|
|||||
|
Из формулы (5) следует, что |
|
|
|
|
|
|
|
F |
|
P |
, |
|
|
(6) |
|
|
||||||
|
П |
VП |
|
||||
|
|
|
|||||
где |
P - мощность, развиваемая приведенной силой, |
Н м |
. |
||||
|
|||||||
|
|
|
|
|
с |
|
|
|
Известно, что мощность, развиваемая всеми силами и моментами, приложенными к |
||||||
звену i , может быть определена: |
|
|
|
|
|
|
|
|
Pi Fi Vi cos M i |
i , |
|||||
|
Мощность при поступательном движении звена i : |
|
|||||
|
Fi Vi |
cos . |
|
||||
|
Мощность при вращательном движении звена i : |
|
|||||
|
|
M i i , |
|
||||
где Fi и M i - сила и момент, приложенные к звену i ; |
|
||||||
|
VKi - скорость точки К приложения силы Fi ; |
|
|||||
i - угловая скорость звена i ;
- угол, образованный вектором силы Fi и вектором скорости VKi .
Таким образом, мощность всех силовых факторов, приложенных к звеньям
механизма, можно представить в виде суммы мощностей:
n |
|
P Pi . |
(7) |
1 |
|
Подставляя значение P из формулы (7) в формулу (6), определяют значение FП .
Силу приведенную FП можно определить с помощью рычага Жуковского, исходя из равенства
F П F У .
66

Т.е. сила FП равна по модулю уравновешивающей силе F У , но имеет противоположное направление.
Приведенный момент
Приведенный момент – это такой момент, который будучи приложенным к звену приведения развивает мощность, равную сумме мощностей всех силовых факторов,
приложенных к звеньям механизма.
M |
РП |
|
Pi |
; |
|||
|
П |
|
П |
||||
|
|
|
|||||
M П FП П ;
M П = MУ .
Суммарный приведенный момент заменяет собой все силы и моменты, действующие на звенья механизма.
Приведение сил и моментов позволяет существенно упростить решение задач динамики. Приведение сил и моментов можно выполнить для любого механизма – рычажного, зубчатого, кулачкового и др.
67

Лекция 10
АНАЛИЗ ДВИЖЕНИЯ МЕХАНИЗМОВ И МАШИН ПОД ДЕЙСТВИЕМ
ПРИЛОЖЕННЫХ СИЛ
1. Скорость машины
Скорость машины определяют, рассматривая динамическую модель механизма
Рисунок 1
Под скоростью машины (механизма с одной степенью свободы) понимают скорость движения звена приведения:
,
где 1 - угловая скорость начального звена заданного механизма.
M - угловая скорость динамической модели.
2. Тахограмма. Режимы движения машины
Построим тахограмму – график, показывающий как изменяется угловая скорость машины с течением времени (за время работы машины).
Работу большинства технологических машин можно показать на графике.
Рисунок 2
На тахограмме показаны три основных режима движения машины:
I – пуск (разбег, разгон);
II – период установившегося движения;
III – останов (выбег).
Т – полное время движения механизма
68
3. Уравнения движения машины для каждого режима в форме
кинетической энергии
Для каждого режима движения машины запишем уравнение движения в форме кинетической энергии.
АД – работа движущих сил FД ( FД приложены к ведущему звену);
АС – работа сил сопротивления FC FПС FBC ( FC приложены к ведомому звену).
Считают, что АД 0 , т.к. движущие силы стремятся ускорить движение звеньев.
Тогда АС 0 , т.к. силы сопротивления стремятся замедлить движение звеньев.
Тогда
АД АС Т2 Т1 Т ,
где Т - изменение кинематической энергии за некоторый период времени t .
I режим - пуск:
Чтобы главный вал машины из неподвижного состояния перешел во вращение и стал вращаться с заданной номинальной скоростью, необходимо затратить работу
АД АС Т ,
АД АПС АВС Т
где АП .С - работа производственных сил сопротивления; АВ.С - работа непроизводственных сил сопротивления.
Т.е. в результате разгона машина должна накопить кинетическую энергию,
обеспечивающую вращение главного вала машины с заданной скоростью.
Тогда можно записать для режима разгона АД АС , т.е. для ведущего звена 2 1 .
АД АС Т 2 Т1 Т 0 .
Чтобы уменьшить работу движущих сил АД , в период пуска целесообразно отключать полезную нагрузку (так на токарных станках сначала дают шпинделю набрать постоянную скорость вращения, а затем уже вводят в работу резец), т.е. АПС 0 .
Тогда, если АПС 0 , получим
АД АВС Т .
II режим - период установившегося движения
а) если скорость машины изменяется циклически, т.е. периодически, тогда
АД АС , т.е. Т 0 .
( АД АС 0 , т.е. суммарная работа движущих сил и сил сопротивления равна нулю)
69
tц - время цикла – это промежуток времени, за который происходит смена скорости.
Скорость в начале и конце цикла одинакова tц const .
Регулирование скорости во время циклического, установившегося движения
производят с помощью маховиков.
б) если движение машины является нециклическим, т.е. tц const , тогда в работе
механизма возникают добавочные нагрузки: ударные, инерционные, динамические
При таком движении регулировать скорость с помощью маховиков не удается, и тогда регулирование скорости производят с помощью специальных регуляторов скорости.
Большинство машин работает периодически, циклически, т.е. tц на протяжении работ
повторяется.
III режим - останов
В этот период
AД < AC , т.е. T < 0 .
Чтобы остановить машину, необходимо поглотить накопленную кинематическую энергию. Для уменьшения времени остановки, вводят дополнительную работу – работу
тормозов, а двигатель отключают. |
||
|
|
|
Тогда T AC |
Аторм |
|
< 0 |
||
АД 0 |
|
|
|
|
|
4. Механический коэффициент полезного действия. Коэффициент потерь
В период установившегося движения эффективность работы механизма, с точки зрения потерь энергии, определяется с помощью механического коэффициента полезного действия.
Одной из задач динамического синтеза механизмов и машин является синтез
(проектирование) механизмов и машин, имеющих минимум потерь мощности (энергии). При оптимальном синтезе механизмов сравнение различных вариантов проводят с помощью показателей качества, одним из которых является коэффициент полезного действия (КПД).
Чем выше механический коэффициент полезного действия, тем выгоднее в эксплуатации машина.
Механическим коэффициентом полезного действия называется отношение абсолютной величины работы сил полезного сопротивления к работе всех движущих сил за цикл установившегося движения:
70