

Лекции по теории механизмов и машин
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n 1 |
|
|
|
|
|
|
iin |
i12 |
i23 |
i(n 1) n |
|
iii 1 |
|
(3) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
Если в (3) подставить (2), то получим формулу для определения передаточного |
|||||||||||||||||
отношения такого сложного зубчатого механизма через числа зубьев зубчатых колес: |
|||||||||||||||||
|
|
|
z2 |
|
|
|
|
|
|
|
|
|
|
|
z2 z3 |
zn |
|
|
|
|
|
z3 |
|
|
zn |
|
|
|
|||||||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|||||||||
in |
|
|
z1 |
|
|
|
z' |
|
|
|
z' |
|
|
|
z z' z' |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
n 1 |
|
|
1 2 |
n 1 |
|
|
Рядовой называется передача, у которой на каждой неподвижной оси имеется только по одному колесу (рисунок 3).
Рисунок 3 – Зубчатый механизм с последовательным соединением колес
Из рисунка 3 видно, что этот механизм является сложным зубчатым механизмом, и
поэтому его передаточное отношение в общем случае должно определяться по (3).
Выразив передаточное отношение такого механизма через числа зубьев, получим
i |
i |
i |
i |
|
|
|
|||||
in |
12 |
23 |
(n 1) n |
|
|
|
|
|
|
|
|
z |
|
|
|
|
2 |
|
|
||
|
|
|
||
|
|
|||
z1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
zn |
|
|
zn |
|
|
z3 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
. |
(4) |
||
|
|
|
|||||||
|
|
|
|
|
z1 |
|
|
||
z2 |
|
|
zn 1 |
|
|
|
|||
В ы в о д . Из (4) следует, что величина передаточного отношения в зубчатых механизмах с последовательным соединением зубчатых колес определяется числом зубьев крайних колес, а промежуточные колеса влияют только на направление вращения. Знак « »
показывает, что первое и последнее колесо вращаются в противоположные стороны.
Поэтому такие механизмы используют в устройствах, где требуется изменение направления вращения выходных звеньев, например, в коробках скоростей или для увеличения межосевого расстояния.
Промежуточные колеса в таких механизмах называют паразитными зубчатыми колесами.
111

КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛАНЕТАРНОГО МЕХАНИЗМА
Элементарные сателлитные механизмы по числу степеней свободы делятся на
планетарные (имеющие одну степень свободы) и дифференциальные (имеющие две и более степеней свободы). В планетарном механизме имеется одно зубчатое колесо, жестко соединенное со стойкой, в дифференциальном механизме все колеса свободны.
Пример кинематического расчета зубчатого механизма с планетарной ступенью
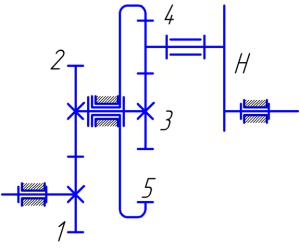
Дано: Зубчатый механизм (рисунок 4) имеет частоту вращения колеса 1 n1=750 мин-1.
Число зубьев колес:
z1=z4=16, z2=40, z5=64.
Определить:
W=?
z3=? i1Н=? nН=?
Рисунок 4
Решение:
Определение степени подвижности механизма Определяем степень подвижности механизма по формуле П. А. Чебышева для
плоских механизмов
W 3 n 2 p5 p4 .
Подвижные звенья n: 1 – колесо 1;
2 – колеса 2 и 3, установленные неподвижно на одной оси;
3– колесо 4 (сателлит);
4– подвижная ось Н (водило).
Итого, n = 4.
Колесо 5 – неподвижное, т.к. жёстко крепится к стойке.
Кинематические пары 5-го класса представляют собой подвижные соединения осей О1, О2 со стойкой, оси О4 с водилом, а также соединение водила со стойкой.
Таким образом, p5 = 4.
112
Кинематические пары 4-го класса, т.е. высшие кинематические пары, находятся в точках касания колес: 1 и 2, 3 и 4, 4 и 5.
Итого, p4 = 3.
Вычисляем степень подвижности механизма
W 3 4 2 4 2 1.
Механизм – планетарный.
Определение числа ст упеней в механ изме Определяем число ступеней в механизме.
I ступень, образованная колесами 1 и 2, – рядовая.
II ступень, включающая колесо 3, неподвижное колесо 5, сателлит 4 и водило Н, –
планетарная.
Определение передаточного отношения I ст упени Определяем передаточное отношение I ступени
i |
z2 |
. |
(1) |
|
|||
12 |
z1 |
|
|
|
|
||
Зацепление внешнее, поэтому отношение имеет знак “ ”.
Определение передаточного отношения II ст упени (планетарной )
Применяем метод обращенного движения. Для этого всему механизму условно задается дополнительная частота вращения, равная и противоположно направленная частоте вращения водила ( nН).
Частота вращения звеньев в обращенном движении изменяется на ( nН) и станут
равны
nН n |
|
n |
Н |
, |
|
||
3 |
3 |
|
|
|
|||
nН n |
4 |
n |
Н |
, |
|
||
4 |
|
|
|
(2) |
|||
nН n |
|
|
|
|
|
||
|
n |
Н |
, |
|
|||
5 |
5 |
|
|
|
|||
nН n |
Н |
n |
Н |
0, |
|||
H |
|
|
|
|
|||
где n3, n4, n5 и nН – соответственно значения частоты вращения колес 3, 4, 5 и водила в реальном механизме. Верхний индекс «Н» показывает, что водило остановлено.
Передаточное отношение обращенного механизма
i H |
nН |
|
n |
n |
Н |
|
n |
n |
H |
|
|
n |
|
|
|
|
3 |
|
3 |
|
|
3 |
|
1 |
|
3 |
1 |
i |
, |
(3) |
|||
|
|
|
|
|
|
|
|
|||||||||
35 |
nН |
|
n5 nН |
0 nH |
|
nH |
3Н |
|
|
|||||||
5
отсюда
113

i |
1 i Н |
, |
(4) |
3Н |
35 |
|
|
- передаточное отношение от колеса 3 к водилу Н.
При остановленном водиле II ступень представляет собой обычную рядовую передачу, поэтому передаточное отношение вычисляем через числа зубьев колес. При этом учитываем знаки:
« » – для внешнего зацепления колес 3 и 4, «+» – для внутреннего зацепления колес 4 и 5.
i H |
|
|
z |
4 |
|
|
|
z |
5 |
|
|
z |
5 |
|
|
|
|
|
|
|
|
|
|
|
. |
||||
|
|
|
|
|
|
|||||||||
35 |
|
|
z3 |
|
|
|
z4 |
|
|
z3 |
||||
|
|
|
|
|
|
|
|
|||||||
Определение числа зубьев z3 колеса 3
Неизвестное число зубьев z3 определяем из условия соосности, согласно которому rW3 2 rW4 rW5 ,
где rW3 , rW4 , rW5 - радиусы начальных окружностей соответственно колес 3, 4, 5.
Формулу (6) можно представить в виде
m z3 |
m z |
4 |
|
m z5 |
, |
|
|
||||
2 |
|
2 |
|
||
|
|
|
|||
где m – модуль колес.
Так как модули всех колес одинаковы, то
(5)
(6)
z3 z5 2 z4 ,
Вычисляем
z3 64 2 16 32.
Определение общего передаточного отношения i1 Н и частоты вращения водила nН
Определяем общее передаточное отношение зубчатого механизма путем
перемножения передаточных отношений отдельных ступеней. |
|
i1H i12 i3H . |
(7) |
Вычисляем значения передаточных отношений по формулам (1),(3) и (4) |
|
|
i |
|
|
z2 |
|
|
40 |
2,5; |
|
|
(8) |
||||||
|
|
|
|
|
|
|
|
||||||||||
|
12 |
|
|
z1 |
|
|
|
16 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 i Н |
|
|
|
|
z |
|
|
|
|
|
64 |
|
|
|
||
|
1 |
|
|
5 |
|
|
|
|
|
|
|
||||||
i |
|
|
1 |
|
|
|
1 2 3 |
(9) |
|||||||||
|
|
|
|||||||||||||||
3Н |
35 |
|
|
|
|
z3 |
|
|
|
|
|
32 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
114
Подставляем полученные выражения (8) и (9) в формулу (7), тогда получаем
|
|
i1H 2,5 3 7,5 . |
(10) |
||||||||
Знак « » показывает, что колесо 1 и водило Н вращаются в противоположные |
|||||||||||
стороны. |
|
|
|
|
|
|
|
|
|
|
|
Так как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
n1 |
, |
|
|||
|
|
|
|
||||||||
|
|
|
|
1H |
|
|
nH |
|
|||
|
|
|
|
|
|
|
|
|
|||
отсюда определяем частоту вращения водила Н |
|
|
|
|
|
|
|||||
n |
H |
|
n1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
i1H |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
nH |
|
750 |
100мин 1. |
|
|||||||
|
|
||||||||||
|
|
7,5 |
|
|
|
|
|
|
|||
Примечание. Передаточное отношение от водила Н к колесу 3 определяется по |
|||||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iH 3 |
|
1 |
. |
|
||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
i3H |
|
|||
Если колесо 5 сделать подвижным, то получим дифференциальную ступень.
Пример решения задачи 8 с дифференциальной ступенью
Дано: Зубчатый механизм (рисунок 5) имеет частоту вращения колеса 1 n1=750 об/мин, частоту вращения колеса 5 n5=60 об/мин
Число зубьев колес: z1=z4=16, z2=40, z5=64.
Определить:
W=? z3=? nН=?
Рисунок 5
Решение:
Определение степени подвижности механизма Определим степень подвижности механизма по формуле П.Л. Чебышева:
W 3 n 2 p5 p4 .
115

Подвижные звенья n: 1 – колесо 1;
2 – колеса 2 и 3, установленные неподвижно на одной оси;
3– колесо 4 (сателлит);
4– колесо 5;
5– подвижная ось Н (водило).
Итого, число подвижных звеньев n = 5.
Число кинематических пар 5-го класса p5 = 5, так как добавляется пара, образованная вращением оси подвижного 5-го колеса относительно стойки; число кинематических пар 4-
го класса p4 = 3.
Вычисляем степень подвижности
W 3 5 2 5 3 2 .
Механизм – дифференциальный.
Определение числа ст упеней в механизме Определяем число ступеней в механизме.
I ступень, образованная колесами 1 и 2, – рядовая.
II ступень, включающая подвижные колеса 3 и 5, сателлит 4 и водило Н – дифференциальная.
Определение передаточного отношения I ст упени Определяем передаточное отношение I ступени
i12 z2 .
z1
Вычисляем
i12 1640 2,5.
Так как
i12 n1 ,
n2
отсюда определяем частоту вращения колеса 2
n2 in1 ,
12
n2 7502,5 300мин 1.
Определение передаточного отношения II ст упени (дифференциальной )
116
Применяем метод обращенного движения, аналогично рассмотренному ранее решению задачи 3 с планетарной ступенью. На основании формул (2) и (5) передаточное отношение обращенного механизма
|
|
i H |
n3 nН |
, |
|
(11) |
|||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
35 |
|
|
|
|
n5 nН |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
i Н |
|
z5 |
. |
|
(12) |
|||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
35 |
|
|
|
|
z3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Приравнивая правые части полученных выражений (11) и (12) |
|
||||||||||||||||
|
n3 nН |
|
|
|
z5 |
, |
|
|
|||||||||
|
|
|
|
|
|
||||||||||||
|
n |
n |
Н |
|
|
|
|
|
z |
3 |
|
|
|
|
|
||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
после преобразований имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
Н |
|
z3 n3 z5 n5 |
. |
(13) |
||||||||||
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
z3 z5 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Поскольку колеса 2 и 3 находятся на одной оси, то частота вращения этих колес одинаковая
n2 n3 300мин 1
Определение числа з убьев z3 колеса 3
Число зубьев колеса 3 определим из условия соосности, аналогично планетарной ступени предыдущей задачи 3.
Так как модули всех колес одинаковы, то
z3 z5 2 z4 ,
Вычисляем
z3 64 2 16 32.
Определение частоты вращения водила nН
Вычисляем частоту вращения водила по формуле (13)
n |
Н |
|
z3 n3 |
z5 n5 |
|
32 300 64 60 |
60мин 1 . |
|
|
|
|||||
|
|
z3 |
z5 |
|
32 64 |
||
|
|
|
|
||||
117
Лекция 14
КУЛАЧКОВЫЕ МЕХАНИЗМЫ
Кулачковым называется трехзвенный механизм с высшей кинематической парой,
входное звено которого называется кулачком, а выходное - толкателем (или
коромыслом).
Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено -
ролик и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью.
Назначение и область применения
Кулачковые механизмы предназначены для преобразования вращательного или поступательного движения кулачка в возвратно-вращательное (рисунок 1) или возвратно-
поступательное движение толкателя (рисунок 2). При этом в механизме с двумя подвижными звеньями можно реализовать преобразование движения по сложному закону.
Рисунок 1 Рисунок 2
Важным преимуществом кулачковых механизмов является возможность обеспечения точных выстоев выходного звена. Это преимущество определило их широкое применение в простейших устройствах цикловой автоматики и в механических счетно-решающих устройствах (арифмометры, календарные механизмы).
Кулачковые механизмы можно разделить на две группы. Механизмы первой обеспечивают перемещение толкателя по заданному закону движения. Механизмы второй группы обеспечивают только заданное максимальное перемещение выходного звена - ход толкателя. При этом закон, по которому осуществляется это перемещение, выбирается из набора типовых законов движения в зависимости от условий эксплуатации и технологии изготовления.
118
Классификация кулачковых механизмов
Кулачковые механизмы классифицируются по следующим признакам:
по расположению звеньев в пространстве
o пространственные
oплоские
по движению кулачка
oвращательное
o поступательное
oвинтовое
по движению выходного звена
oвозвратно-поступательное (с толкателем)
oвозвратно-вращательное (с коромыслом)
по наличию ролика
oс роликом
oбез ролика
по виду кулачка
oдисковый (плоский)
o цилиндрический
oконоид (сложный пространственный)
по форме рабочей поверхности выходного звена
oплоская
o |
заостренная |
o |
цилиндрическая |
o |
сферическая |
oэвольвентная
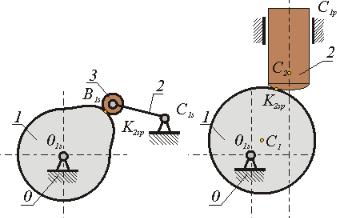
по способу замыкания элементов высшей пары o силовое геометрическое
При силовом замыкании удаление толкателя осуществляется воздействием контактной поверхности кулачка на толкатель (ведущее звено - кулачок, ведомое -
толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины (рисунок 3) или силы веса толкателя, при этом кулачок не является ведущим звеном.
При геометрическом замыкании (рисунок 4) движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении - воздействием внутренней рабочей поверхности кулачка на толкатель.
119
На обеих фазах движения кулачок ведущее звено, толкатель - ведомое.
Рисунок 3 Рисунок 4
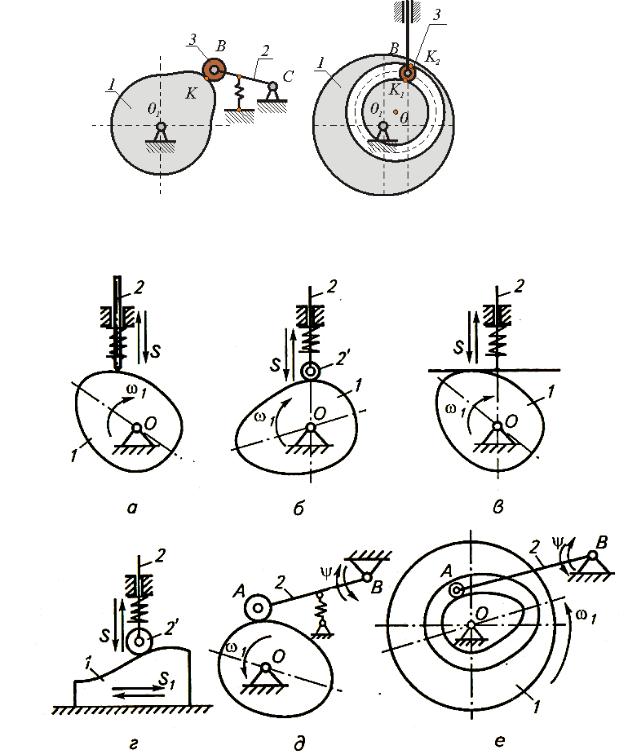
На рисунке 5 приведены различные виды кулачковых механизмов.
Рисунок 5 – Виды плоских кулачковых механизмов:
а) с игольчатым толкателем; б) с роликовым толкателем, в) с тарельчатым толкателем,
г) поступательно-движущимся кулачком, д) с коромыслом, с пазовым кулачком.
120