

4 Анализ источников методических и инструментальных погрешностей выбранной схемы пип.
При измерениях различных неэлектрических величин емкостными датчиками могут возникнуть погрешности, вызванные влиянием температуры и влажности. Под влиянием температуры могут изменяться геометрические размеры датчика, а также диэлектрическая проницаемость (в датчиках с твердым и жидким диэлектриком). Эти погрешности могут быть сведены к минимуму путем выбора соответствующей конструкции датчика (правильный выбор геометрических размеров деталей с учетом их температурных коэффициентов расширения). В значительной степени температурная погрешность снижается при применении дифференциальных измерительных схем. Сильное влияние на точность преобразования оказывают паразитные емкости и посторонние электрические поля, ввиду чего емкостные датчики необходимо очень тщательно экранировать. Первым усовершенствованием, существенно повышающим метрологические характеристики датчика, является введение экранных электродов. Экраны обеспечивают значительную локализацию поля, создаваемого рабочими электродами преобразователя, и в результате существенно повышают его относительную чувствительность. Кроме того положительным эффектом экранов является резкое снижение электромагнитных наводок и, в ряде случаев, увеличения рабочей емкости, так как является частью высокопотенциального электрода. Дальнейшее улучшение метрологических характеристик достигается путем установки охранных электродов, с помощью которых исключается влияние краевых полей у торцов преобразователя. Кроме того, сам контролируемый проводник иногда является рабочим электродом преобразователя. Установление соответствующих потенциалов на электродах и контролируемом проводнике позволяет создать плоскопараллельное поле в рабочей зоне преобразователя, что улучшает его метрологические характеристики. Еще одна из причин возникновения погрешностей при использовании данного типа датчиков состоит в том, что на промышленной частоте мощность датчика очень мала, поэтому для обнаружения изменения емкости необходимо использовать достаточно чувствительную аппаратуру, а его сопротивление велико, из-за чего могут возникнуть большие погрешности, обусловленные паразитными утечками. Поэтому необходимо применять источники питания высокой частоты (от 1 кГц до десятков мегагерц).[6]
заключение
В данной работе были рассмотрены датчики ускорения с емкостными преобразователями. Произведен обзор существующих методов и средств измерения ускорения. Описаны принцип действия емкостных преобразователей, схемы преобразования измеряемой величины в электрический сигнал. Также был проведен анализ инструментальных и методических погрешностей емкостных преобразователей.
Список использованной литературы
1 Конспект лекций: методы и средства измерения ускорения. URL: http://www.hobbycnc.ru/docs/axeliall.pdf (дата обращения: 20.03.2014)
2 Боднер, В. А. Измерительные приборы/ В. А. Боднер, А. В. Алферов.-Москва: Изд-во стандартов, 1986. - 616 с.
Т. 1. Теория измерительных приборов. Измерительные преобразователи. - 1986. - 392 с.
Т. 2. Методы измерений, устройство и проектирование приборов. - 1986. - 224 с.
3 Бухгольтц В.П., Тисевич Э.Г. Емкостные преобразователи в системах автоматического контроля и управления., М., «Энергия», 1972. – 80 с.
4 Левшина Е.С., Новицкий П.В. Электрические измерения физических
величин: учебное пособие. – Л.: Энергоатомиздат, 1983. -320 с.
5 Мазин В.Д. Метрология и теплотехнические измерения: учебное пособие. СПб.: Изд-во Политехнического университета, 2010. -124 с.
6 Конспект лекций: принцип действия емкостных преобразователей. URL:http://allsummary.ru/249-princip-deystviya-emkostnyh-pip.html(дата обращения: 02.04.2014)
7 Дадаян Ю.А. Методические указания для студентов специальности «Информационно-измерительная техника и технологии». – М.: РГУ нефти и газа им. И.М. Губкина, 2005 г.
Для преобразования изменений емкости в соответствующие изменения тока, напряжения или частоты применяются различные электрические схемы: резонансные, мостовые и другие. При включении емкостных преобразователей в мостовые схемы необходимо:
- большое сопротивление в выходной диагонали моста;
- экранирование всех подводящих проводов;
- отсутствие элементов шунтирующих рабочие емкости.
Питание измерительных схем емкостных преобразователей осуществляется обычно переменным током повышенной частоты – от нескольких килогерц до десятков мегагерц. При низких частотах реактивное сопротивление преобразователя весьма велико, так как емкость не превышает несколько сот пикофарад.
При проектировании емкостных преобразователей следует иметь в виду, что зависимость емкости С от расстояния между пластинами δ имеет гиперболический характер, в то время как сопротивление XC зависит линейно от расстояния δ.
При включении емкостных дифференциальных преобразователей в мост напряжение на его выходе определяется по упрощенной формуле:
Как видно из этой формулы, нелинейность характеристики U=f(δ)определяется отношением входного сопротивления указателя к выходному сопротивлению моста.
Основными достоинствами емкостных преобразователей является большая чувствительность, относительно малые размеры и вес, а также очень малое обратное действие на контролируемый параметр.
К числу недостатков следует отнести:
- сильное влияние на точность преобразования паразитных емкостей и посторонних электрических полей, ввиду чего емкостные датчики необходимо очень тщательно экранировать;
- необходимость применения источников питания высокой частоты, так как на промышленной частоте мощность датчика очень мала, поэтому для обнаружения изменения емкости необходимо использовать достаточно чувствительную аппаратуру, а его сопротивление велико, из-за чего могут возникнуть большие погрешности, обусловленные паразитными утечками;
- влияние температуры на геометрические размеры и диэлектрическую проницаемость (в датчиках с твердым и жидким диэлектриком).
Первым усовершенствованием, существенно повышающим метрологические характеристики ПИП, является введение экранных электродов. Экраны обеспечивают значительную локализацию поля, создаваемого рабочими электродами преобразователя, и в результате существенно повышают его относительную чувствительность. Кроме того положительным эффектом экранов является резкое снижение электромагнитных наводок и, в ряде случаев, увеличения рабочей емкости, так как является частью высокопотенциального электрода.
Дальнейшее улучшение метрологических характеристик емкостных ПИП достигается путем установки охранных электродов, с помощью которых исключается влияние краевых полей у торцов преобразователя.
Кроме того, сам контролируемый проводник иногда является рабочим электродом ПИП. Установление соответствующих потенциалов на электродах и контролируемом проводнике позволяет создать плоскопараллельное поле в рабочей зоне преобразователя, что улучшает его метрологические характеристики.
Емкостные датчики можно разделить на две основные группы - датчики параметрические (недифференциальные) и датчики дифференциальные.
В схемах с параметрическими датчиками происходит преобразование входной неэлектрической величины (угла поворота оси ротора датчика) в электрическую выходную величину (частоту, ток, напряжение), функционально зависящую от входной величины.
В схемах сдифференциальными датчиками, включенными в следящие системы, с датчика снимается лишь сигнал рассогласования, который становитсяравным нулю в установившемсясостоянии следящей системы.
Примером параметрического емкостного датчика может служить переменная емкость, включенная вконтур лампового генератора (рисунок 3.4). Здесь при изменении угла поворота оси ротора изменяется емкость датчика и меняется частота генератора, являющаяся выходнойвеличиной.
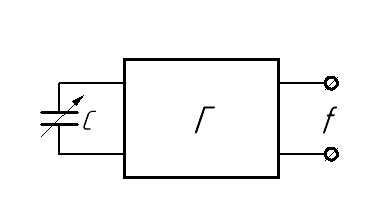
Рисунок 3.4 - Емкостной датчик, включенный в контур с генератором
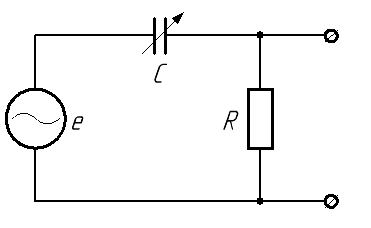
Рисунок 3.5 - Емкостной датчик, включенный в цепь переменного тока
На
рисунке 3.5 приведен другой пример
использования
параметрического датчика. В этом
случае с изменениемзначения
емкости С меняется ток через нее, а
следовательно, и напряжение на выходе
системы, падающее на сопротивлении
нагрузки R ,
которое и является выходной величиной.
,
которое и является выходной величиной.
Подобные системы являются разомкнутыми системами регулирования. Основным недостатком этих схем является зависимость значения выходной величины от параметров источника питания датчика, усилителя и других элементов схемы, а также от внешних условий. Стоит измениться напряжению или частоте генератора, питающего датчик (рисунок 3.5), как напряжение, частота и фаза, являющиеся выходными величинами и снимаемые с сопротивления R, также изменятся.
От этих недостатков свободны схемы с дифференциальными емкостными датчиками, включенными в замкнутую систему автоматического регулирования. В этих схемах выходной величиной является угол поворота оси отрабатывающего двигателя или другой оси, связанной с нею через редуктор. Одной из основных характеристик такой системы является чувствительность, показывающая, при каком минимальном отклонении чувствительногоэлемента система отработки приходит в действие. Внешние факторы - напряжение питания, температура окружающей среды и т. п.-влияютлишь начувствительность системы; на точность системы они могут влиять лишь в той мерь, вкакой она связана с чувствительностью.
Это значит, что схемы с емкостными дифференциальными датчиками, так же как и любые мостовые нулевые схемы с линейными относительно частоты и напряжениясопротивлениями в плечах, предъявляют значительноменьшие требования к стабильности источника питания.