

Белорусский Национальный Технический Университет
Приборостроительный факультет
Кафедра «Информационно-измерительная техника и технологии»
Курсовая работа
по дисциплине «Первичные измерительные преобразователи и ИНВ»
Датчик ускорения с емкостным пип
|
Исполнитель: |
студент группы 31303112 Дрозд П.В. |
|
Руководитель: |
профессор Джилавдари И.З. |
Минск 2015
Содержание
Введение 4
1 Обзор существующих методов измерения физической величины и их сравнительный анализ.
1.1 Методы измерения ускорения 5
1.2 Средства измерения ускорения 5
2 Описание принципа действия ПИП в статическом и динамическом режимах. 11
3 Описание функциональной схемы ПИП, в том числе и схемы преобразования измеряемой величины в электрический сигнал 14
3.1 Описание функциональной схемы первичного измерительного преобразователя 14
3.2 Описание схем преобразования измеряемой величины в
электрический сигнал. 17
4 Анализ источников методических и инструментальных погрешностей выбранной схемы ПИП. 22
Заключение 24
Список использованной литературы 25
Введение
В современной технике значения неэлектрических величин, параметры и характеристики неэлектрических процессов измеряют преимущественно электрическими и радиоэлектронными методами.
Общий принцип работы подобных приборов предполагает преобразование неэлектрической величины в электрическую. Роль последней может выполнять параметр какого-либо компонента электрической цепи (емкость конденсатора, индуктивность катушки, сопротивление резистора) или электрическое напряжение (ток), определенный параметр которого, однозначно соответствует неэлектрической величине. При преобразовании процессов чаще всего достигается соответствие между мгновенными значениями электрического напряжения (тока) и мгновенными значениями неэлектрического процесса. Значения электрических величин и параметры напряжения (тока) измеряются с помощью радиоэлектронных или электрических средств измерений. Рассматриваемые методы обладают многими достоинствами. К ним можно отнести:
возможность осуществления дистанционных измерений (в том числе на сильно удаленных объектах и объектах, недоступных для присутствия экспериментатора);
ускорение измерений;
возможность непрерывного измерения значений или характеристик процесса;
высокую чувствительность измерительных средств;
хорошие предпосылки для автоматизации измерений;
упрощение обработки результатов измерений и т.п.
В данной курсовой работе приводится описание прибора для измерения отклонения толщины диэлектрической ленты от образцового значения на основе емкостного измерительного преобразователя.
1 Обзор существующих методов измерения физической величины и их сравнительный анализ
Ускорение − производная скорости по времени, векторная величина, показывающая, насколько изменяется вектор скорости точки (тела) при её движении за единицу времени (т.е. ускорение учитывает не только изменение величины скорости, но и её направления). Единица измерения ускорения: [м/с2].
Методы измерения ускорения
Инерциальный метод − заключается в измерении силы, развиваемой инерционной массой при ее движении с ускорением.
Метод дифференцирования скорости − заключается в дифференцировании одним из известных способов сигнала датчика скорости. Возможно дифференцирование не только электрических сигналов, но и пневматических. Например, если подать полное давление встречного потока воздуха в вариометр, то показания последнего будут функцией продольного ускорения.
Метод двукратного дифференцирования расстояния до неподвижной базы − пригоден в основном для измерения вертикального ускорения и заключается в двукратном дифференцировании одним из известных способов сигнала высотомера.
Средства измерения ускорения
Основное применение нашел инерциальный метод. Приборы и датчики, служащие для измерения ускорения подвижных объектов, основанные на этом принципе действия, называются акселерометрами.
В зависимости от способа измерения силы акселерометры подразделяются на:
- пружинные.
- компенсационные.
В пружинных акселерометрах сила, развиваемая инерционной массой, вызывает упругую деформацию пружины, которая создает противодействующую силу. Деформация пружины служит мерой измеряемого ускорения и при необходимости преобразуется в электрический сигнал.
В компенсационных акселерометрах инерционная сила уравновешивается силой, развиваемой магнитоэлектрическим или другим преобразователем. Эта сила пропорциональна силе тока, которая и служит выходным сигналом. Структурная схема таких акселерометров содержит позиционную отрицательную обратную связь.
Принцип действия средств измерений, реализующий инерциальный метод, состоит в следующем (рисунок 1.1).
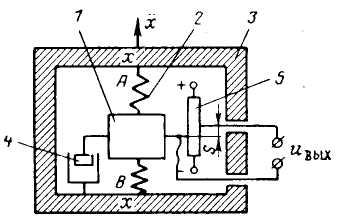
Рисунок 1.1 – Схема пружинного акселерометра (1 – масса, 2 – пружина, 3 – корпус, 4 – демпфер)
Чувствительным элементом акселерометра служит инерционная масса 1, подвешенная на двух пружинах 2, прикрепленных в точках АиВк корпусу 3, жестко связанному с движущимся объектом.
Линия АВявляется осью чувствительности акселерометра. Она параллельна той оси движущегося объекта, по которой нужно измерить ускорениех.
При отсутствии ускорений натяжение пружин одинаково и масса располагается в среднем (нейтральном) положении. Если объект движется с постоянным линейным ускорением х, то масса перемещается на некоторую величину, при которой инерционная силаFин, возникающая вследствие ускоренного движения массы в абсолютном пространстве, уравновешивается силойFупрупругости пружин.
Для успокоения колебаний инерционной массы в переходном режиме служит демпфер 4, создающий силу, пропорциональную скорости перемещения массы относительно корпуса 3. Применяют магнитоиндукционные, жидкостные или воздушные демпферы.
Требования к акселерометрам в отношении точности измерения определяются областью применения. Так, погрешности акселерометров в инерциальных системах не должны превышать 0,001%. Акселерометры, используемые в системах управления, имеют погрешности на два-три порядка выше. Погрешности акселерометров, применяемых в качестве визуальных приборов, составляют 1-3%.
Основными элементами акселерометров являются подвесы инерционных масс, преобразователи сигналов, моментные (силовые) устройства, усилители сигналов и корректирующие устройства (демпферы).
Для того чтобы акселерометр реагировал только на ту составляющую ускорения, для измерения которой он предназначен, его инерционная масса должна иметь специальный подвес, удовлетворяющий следующим требованиям:
- минимальное трение в осях подвеса;
- отсутствие перекрестных связей между измерительными осями;
- обеспечение линейной зависимости между отклонениями инерционной массы и измеряемым ускорением.
Подвесы на простых опорах создают значительное трение, которое снижает чувствительность акселерометра. Для уменьшения трения чувствительный элемент укрепляют на рычаге или помещают в жидкость с удельным весом, равным удельному весу чувствительного элемента, либо устанавливают его на воздушной подушке, на струнах. Применяют также электромагнитные и криогенные подвесы.
В качестве преобразователей сигналов применяются емкостные, индуктивные, фотоэлектрические, струнные и др. Основные требования к ним: большая разрешающая способность, линейная зависимость выхода от входа, отсутствие реакции преобразователя на чувствительный элемент.
Моментными (силовыми) устройствами для ввода сигналов обратной связи являются моментные двигатели (электродвигатели, работающие в заторможенном режиме) и электромагниты.
В маятниковых акселерометрах (рисунок 1.2) чувствительный элемент 4 находится в жидкости 2, заключенной в корпусе 3. Температура жидкости поддерживается с точностью до 0,01 "С, что позволяет устранить ее конвективные движения. Сигнал с чувствительного элемента снимается преобразователем 5 и подается на усилитель У. С выхода усилителя сигнал поступает на моментный двигатель, развивающий момент, зависящий от ускорения.
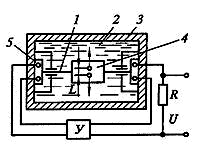
Рисунок 1.2 - Схема маятникового акселерометра (1 - подвеска; 2 - жидкость; 3 - корпус; 4 - чувствительный элемент; 5 - преобразователь; У - усилитель).
В акселерометрах со струнными преобразователями 1 и 5 (рисунок 1.3) смещение массы m меняет упругие свойства струн 2 и 4. натянутых в направлении оси чувствительности. Упругий подвес 3 исключает движение массы m в поперечном направлении. Сумма частот колебаний струн 2 и 4 (f1+f2) поддерживается постоянной посредством регулирующего устройства 8, для чего она сравнивается с эталонной частотой f0, вырабатываемой генератором 6. Разность Δf = (f1+f2)-f0 используется для управления механизмом 7 натяжения струн. При поддержании значения (f1+f2) постоянным получается линейная зависимость между измеряемым ускорением ах и разностью частот Δf.
Струнные акселерометры находят применение в инерциальных системах управления.
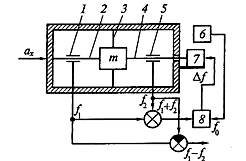
Рисунок 1.3 - Схема струнного акселерометра (7 и 5 - струнный преобразователь; 2 и 4 - струна; 3 - упругий подвес; 6 - генератор; 7 - механизм натяжения струн; 8 - регулирующее устройство).
Акселерометр с волоконно-оптическим измерительным преобразователем основан на эффекте фотоупругости. Некоторые материалы (эпоксидная смола, нитрат лития и др.) меняют свои оптические свойства при их деформировании. На этой основе создан целый ряд средств измерения, в которых сила преобразуется в деформацию. На рисунке 1.4 источник света 1 (например, полупроводниковый лазер), проходя через линзу 3 и поляризатор 4, поступает на стержень из фотоупругого материала 5, изменяющий свое напряженное состояние в зависимости от ускорения груза акселерометра 2. Преобразуя полученный сигнал с помощью четвертьволновой пластины 6, анализатора 7 и линзы 8, он поступает по волоконному светопроводу 9 на приемник излучения (фотодиод) 10. В результате определяется величина ускорения с достаточно высокой точностью.
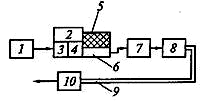
Рисунок 1.4 - Схема акселерометра с волоконно-оптическим преобразователем (1 - источник света; 2 - акселерометр; 3 и 8 - линза; 4 - поляризатор; 5 - фотоупрутий материал; 6 - четвертьволновая пластина; 7 - анализатор; 9 - волоконный светопровод; 10 - приемник излучения - фотодиод).
Измерение угловых ускорений возможно аналогичными методами.
При инерциальном методе измерения инерционная масса подвешивается на оси с одной степенью свободы, проходящей через центр тяжести этой массы. Измеряется момент инерционных сил, развиваемый массой при ее вращении с угловым ускорением. Применимы те же два способа измерения инерционных сил, что и в линейных акселерометрах, — пружинный и компенсационный.
При определении угловых ускорений методом дифференцирования производится дифференцирование сигнала гироскопического датчика угловых скоростей.
Для определения угловых ускорений методом двукратного дифференцирования используется сигнал гироскопического датчика угла. [1,2]