

2 Описание принципа действия пип в статическом и динамическом режимах.
Ни одна система управления не может работать без информации о состоянии объекта управления и его реакции на управляющее воздействие. Элементом систем, обеспечивающим получение такой информации, является измерительный преобразователь.
Принцип действия параметрических преобразователей заключается в преобразовании неэлектрических входных величин в параметры электрических цепей: сопротивление R, индуктивностьL, емкостьС. Для питания этих преобразователей требуются внешние источники. К таким датчикам относятся: резистивные, индуктивные, трансформаторные, емкостные преобразователи.
Емкостный преобразователь представляет собой конденсатор, электрические параметры которого изменяются под действием входной величины.
Конденсатор состоит из двух электродов, к которым подсоединены выводные концы. Пространство между электродами заполнено диэлектриком. При изменении взаимного положения электродов или при изменении диэлектрической проницаемости среды, заполняющей межэлектродное пространство, изменяется емкость конденсатора.
В качестве емкостного преобразователя широко используется плоский конденсатор. Его емкость определяется выражением
(2.1)
где – относительная диэлектрическая проницаемость диэлектрика;0– диэлектрическая проницаемость вакуума;S– площадь пластины;– толщина диэлектрика или расстояния между пластинами.
Из приведенного соотношения видно, что на емкость конденсатора можно влиять изменением площади перекрытия пластин S (рисунок 2.1, а), расстояния между ними(рисунок 2.1, б), диэлектрическая проницаемость вещества, находящегося в зазоре между обкладками конденсатора (рисунок 2.1, в).
|
|
|
|
|
|
|
|
|
«S» а) |
«» б) |
(х) в) |





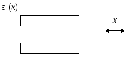
Рисунок 2.1 – Схемы и характеристики емкостных датчиков с различными изменяемыми параметрами:
а – площади перекрытия пластин; б – расстояния между пластинами;
в – диэлектрической проницаемости вещества в зазоре.
При измерении линейного перемещения в качестве изменяемого параметра конденсатора можно выбрать величину δ (рисунок 2.1, б), тогда статическая характеристика измерительного преобразователя будет нелинейной. В связи с этим такие датчики следует применять в тех случаях, когда диапазон изменения контролируемой величины соответствует сравнительно небольшому участку характеристики, на котором ее можно считать линейной. Как правило, величина перемещения не должны превышать 1 мм. При измерении сравнительно больших линейных перемещений целесообразно использовать в качестве изменяемого параметра конденсатора площадь перекрытия пластин (рисунок 2.1, а). Выбор того или иного параметра конденсатора в качестве изменяемого зависит от характера измеряемой величины. Так при измерении угловых механических перемещений наиболее удобно использовать в качестве изменяемого параметра площадь перекрытия пластин (рисунок 2.2). Статическая характеристика такого емкостного датчика будет линейной.
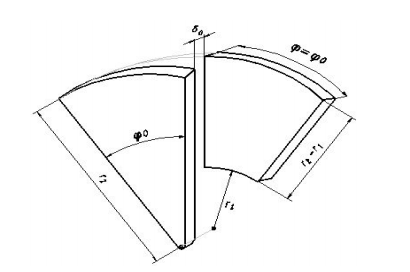
Рисунок – 2.2 – Емкостной датчик для измерения угловых величин.
Следует отметить, что рассмотренные емкостные датчики не обладают свойством реверсивности. [3,4,5]
Другой не менее важной характеристикой емкостного датчика или преобразователя является динамическая характеристика.
Динамической характеристикой емкостного датчика называется зависимость изменения выходной величины от скорости изменения входной величины.
Динамическая характеристика
может быть представлена в виде кривой
переходного процесса, т.е. зависимостью
С= (
( )
при скачкообразных изменениях входной
величины, или амплитудно-фазовой
характеристикой, т.е. зависимостью
амплитуды (U
или I)
и фазы (
)
при скачкообразных изменениях входной
величины, или амплитудно-фазовой
характеристикой, т.е. зависимостью
амплитуды (U
или I)
и фазы ( )
выходного сигнала от частоты
)
выходного сигнала от частоты изменения входной величины.
изменения входной величины.
Наиболее трудной для анализа является динамическая характеристика емкостного датчика с нелинейной статической характеристикой в этом случае динамические свойства датчика должны рассматриваться с введением линеаризации. [3]
На основе подобных емкостных преобразователей могут быть созданы датчики силы, ускорения и давления с первичным преобразованием этих величин в малое перемещение. [4]