

4.2. Система подчиненного регулирования параметров электропривода.
Сущность подчиненного
регулирования заключается в том, что
электрический двигатель как объект
управления представляется в виде
последовательно соединенных звеньев,
выходными параметрами которых являются
ток, напряжение, ЭДС, момент, скорость
и т.д. И они же являются регулируемыми
координатами
![]() .
.
Для управления каждой их этих координат имеется отдельный регулятор и соответствующая обратная связь.
Регуляторы соединяются последовательно, т.е. выход предыдущего регулятора является входом последующего. Образуется система концентрических контуров, число которых соответствует числу регулируемых координат электропривода. Регулятор внешнего контура регулирует основную координату, например скорость, и вырабатывает управляющее воздействие для регулятора внутреннего контура, например регулятора тока. Таким образом, первый регулятор (регулятор тока) и первая регулируемая координата (ток) подчинены соответственно второму регулятору (регулятору скорости) и второй регулируемой координате (скорости).
На рис.4.3 приведена
схема тиристорного электропривода с
внешним контуром скорости и внутренним
контуром тока якоря. Для представления
двигателя в виде последовательно
соединенных звеньев влиянием ЭДС
двигателя пренебрегают, так как ток
якоря изменяется значительно быстрее,
чем ЭДС двигателя. Таким образом, объект
управления (тиристорный преобразователь
с двигателем) состоит из трех последовательно
соединенных звеньев: тиристорного
преобразователя с передаточной функцией
![]() ,
,
якорной цепи двигателя с передаточной функцией
механической части привода с передаточной функцией
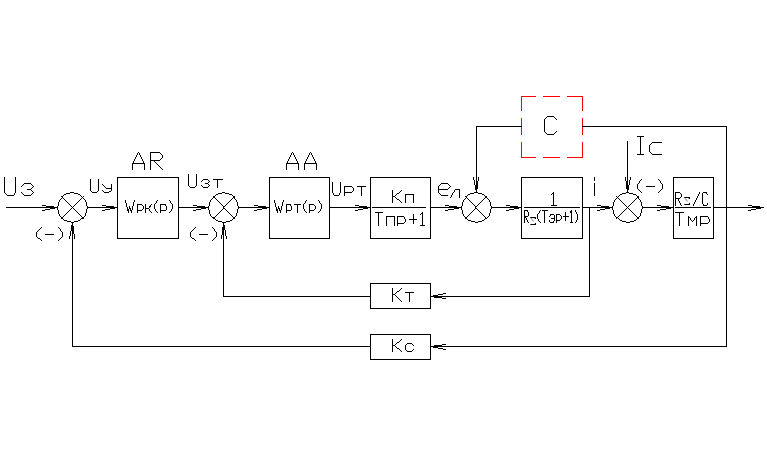
Рис.4.3. Структурная схема тиристорного электропривода с внешним контуром скорости и внутренним контуром тока якоря.
Контур тока образован регулятором тока АА, тиристорным преобразователем и якорной цепью и замыкается обратной связью по току с коэффициентом передачи КТ.
Контур скорости образован регулятором скорости AR, контуром тока, механической частью привода и обратной связью по скорости с коэффициентом передачи КС.
Регуляторы в системах подчиненного регулирования выбираются таким образом, чтобы замкнутый контур имел передаточную функцию колебательного звена вида
![]() (4.2)
(4.2)
При выполнении
условия технического оптимума коэффициент
демпфирования равен
![]() и
переходный процесс будет иметь
перерегулирование 4,3 %, а время регулирования
(6…8)
и
переходный процесс будет иметь
перерегулирование 4,3 %, а время регулирования
(6…8)![]() .
.
Контур с такой передаточной функцией не является предельным ни по быстродействию, ни по перерегулированию, однако в большинстве случаев удовлетворяет практическим требованиям.
Для получения передаточной функцией замкнутого контура в виде (4.2) необходимо иметь передаточную функцию разомкнутого контура в виде
![]() (4.3)
(4.3)
Передаточная функция регулятора выбирается из условия компенсации основной инерционности объекта управления.
Принцип компенсации можно сформулировать следующим образом: каждому звену объекта управления с большой постоянной времени должно соответствовать звено с передаточной функцией обратной передаточной функции компрессируемого звена.
В контуре тока (рис.4.3) инерционность якорной цепи, обусловленная постоянной времени ТЭ, будет значительно больше инерционности тиристорного преобразователя, определяемой постоянной времени ТП. Поэтому компенсируется влияние постоянной времени ТЭ, а постоянная времени ТП является некомпенсируемой постоянной времени.
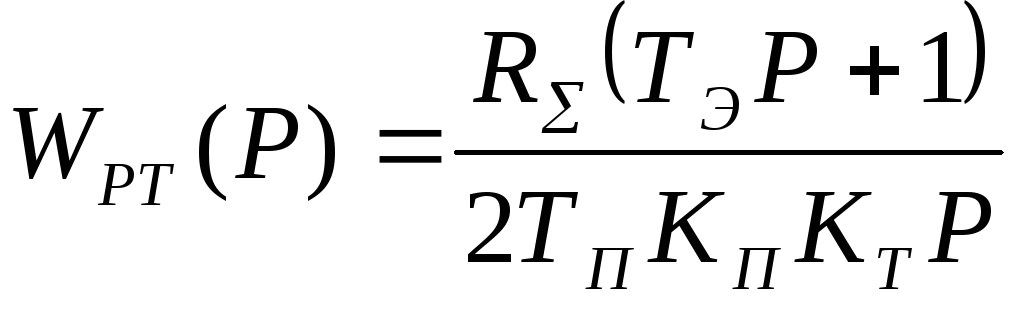
Передаточная функция разомкнутого токового контура без учета влияния ЭДС будет иметь вид
 (4.4)
(4.4)
и должна быть равна передаточной функции вида (4.3).
Приравнивая
выражение (4.4) к выражению (4.3) и принимая
постоянную времени
![]() равной некомпенсированной постоянной
времени ТП,
получим
равной некомпенсированной постоянной
времени ТП,
получим
 (4.5)
(4.5)
Таким образом, контур тока оптимизируется пропорционально интегральным регулятором (ПИ – регулятором).
Передаточная
функция контура тока в замкнутом
состоянии может быть определена исходя
из допущения, что
![]() и можно принять
и можно принять![]() ,
тогда
,
тогда
![]() ,
,
следовательно
Передаточная функция разомкнутого контура скорости записывается в виде
 (4.6)
(4.6)
Здесь внутренний контур тока аппроксимируется инерционным звеном с постоянной времени 2ТП, при этом ошибка аппроксимируется несущественна.
Приравнивая
выражение (4.6) к выражению (4.3) и принимая
постоянную времени
![]() равной
некомпенсированной постоянной времени
скоростного контура 2ТП,
получим равенство
равной
некомпенсированной постоянной времени
скоростного контура 2ТП,
получим равенство
откуда
 (4.7)
(4.7)
Из (4.7) следует, что регулятор скорости представляет собой пропорциональный регулятор (П - регулятор), при включении которого оказывается скомпенсированной электромеханическая постоянная времени
Передаточная функция замкнутой системы имеет вид
 (4.8)
(4.8)
Из этой зависимости следует, что вся система электропривода представлена колебательным звеном.
Чтобы ограничить ток якоря, необходимо ограничить на соответствующем уровне выходное напряжение регулятора скорости.
Колебательное звено (4.2) не обеспечивает астатизма системы. Поэтому, чтобы сделать статизм системы равным нулю, применяется дополнительный интегральный регулятор, позволяющий получить симметричный оптимум системы.
При настройке на симметричный оптимум передаточная функция разомкнутого контура регулирования имеет вид
![]() (4.9)
(4.9)
Системы, настроенные на симметричный оптимум, не имеют статической ошибки, однако в такой системе перерегулирования переходного процесса достигает 55 %.
Для системы,
настроенной на симметричный оптимум,
выражение (4.6) равно выражению (4.9) при
![]() =2ТП.
=2ТП.
откуда
 (4.10)
(4.10)
что соответствует передаточной функции ПИ – регулятора.
Приведенные соотношения (4.2)…(4.10) справедливы для режима непрерывных токов тиристорного преобразователя, при котором параметры системы постоянны.