

3.1.2. Система стабилизации скорости с отрицательной обратной связью по напряжению и положительной по току
При данном виде
обратной связи уравнение для
![]() в системе уравнений (3.1) необходимо
записать в виде
в системе уравнений (3.1) необходимо
записать в виде
![]()
Решая систему
уравнений (3.1) относительно угловой
скорости вращения
![]() ,
получим
,
получим
 .
(3.6)
.
(3.6)
Уровень стабилизации
скорости в замкнутой системе с
отрицательной обратной связью по
напряжению и положительной по току как
ошибка
![]() определяется вторым слагаемым в выражении
(3.6)
определяется вторым слагаемым в выражении
(3.6)
 (3.7)
(3.7)
Требуемый
коэффициент усиления усилителя через
заданную ошибку
![]() определяется выражением
определяется выражением
и через требуемый статизм и диапазон регулировки
 (3.8)
(3.8)
Задающий сигнал UЗ
![]() (3.9)
(3.9)
Комбинация связей
по напряжению и току получила
распространение в виде обратной связи
по ЭДС двигателя, когда
 (см.(3.6)). Датчиком
(см.(3.6)). Датчиком
противо-ЭДС двигателя является уравновешенный тахометрический мост, у которого R1R3=R2RД (рис.3.2).
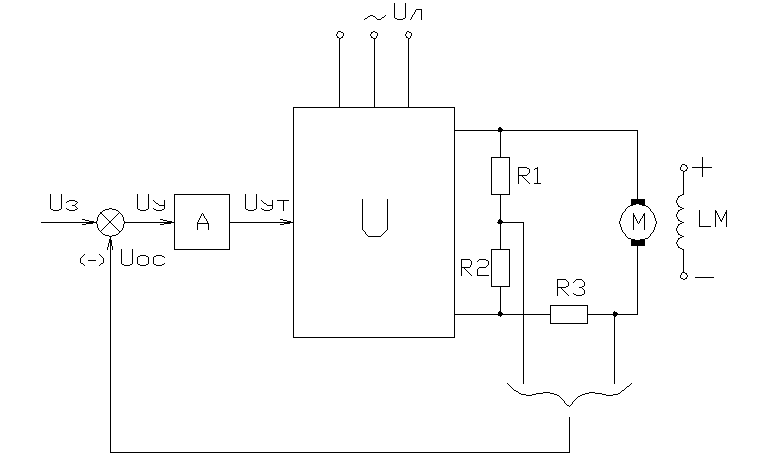
Рис.3.2. Функциональная схема электропривода с отрицательной обратной связью по ЭДС двигателя
Напряжение обратной связи по ЭДС (см.3.3.3)
![]()
Уравнение электромеханической характеристики
![]()
Требуемый коэффициент усиления усилителя
 (3.10)
(3.10)
Обратная связь по ЭДС двигателя обеспечивает стабилизацию его скорости с точностью более низкой, чем обратная связь по скорости, осуществляемая с помощью тахогенератора. Используется такая связь при невозможности или нежелательности установки тахогенератора, например, когда выбранный двигатель соизмерим по мощности с тахогенератором.
3.2. Системы стабилизации скорости электропривода постоянного тока с ограничением тока (момент)
При резком изменении задающего напряжения в замкнутых системах электропривода сигнал управления в первый момент времени значительно превышает свое установившееся значение. Это приводит к увеличению напряжения на выходе преобразователя, что в свою очередь может привести к возрастанию тока якоря двигателя до недопустимых значений. Следовательно, требуется введение ограничения тока (момента) двигателя.
Ограничение тока двигателя в рассматриваемых системах электропривода осуществляется с помощью отрицательной обратно связи по току, которая включается при достижении током якоря своего предельного значения. Отрицательная обратная связь по току снижает напряжение на выходе преобразователя и таким образом ограничивает увеличение тока якоря двигателя. Эта связь называется задержанной обратной связью или отсечкой по току.
Ограничение тока двигателя необходимо в приводах механизмов, работающих с резко переменной нагрузкой или на упор (например, в экскаваторах).
Задержанная обратная связь осуществляется введением в цепь обратной связи нелинейного элемента, статическая характеристика которого изображена внутри прямоугольника, обозначающего датчик обратной связи на рис.3.3, где UТО – напряжение токовой отсечки, пропорциональное току якоря; IОТС – ток отсечки, при котором начинается ограничение тока (ток отсечки).
Напряжение UТО отрицательной обратной связи по току
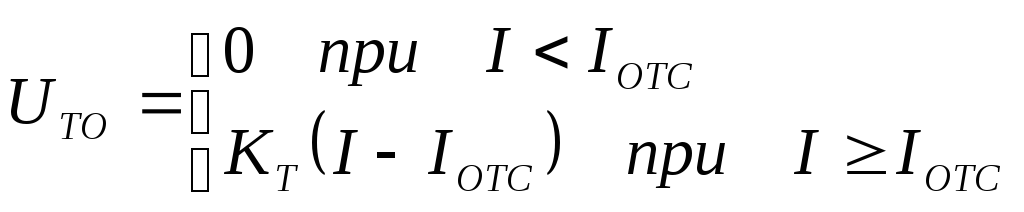
Уравнение электромеханической характеристики в системах с задержанной обратной связью по току и при отсутствии других обратных связей имеет следующий вид:
при I
< IОТС
![]()
при I
≥ IОТС
![]()
Уравнение электромеханической характеристики в системах с задержанной обратной связью по току и с отрицательными обратными связями по скорости и напряжению имеет вид:
при I
< IОТС
 (3.11)
(3.11)
при I
≥ IОТС
 (3.12)
(3.12)
Электромеханическая характеристика электропривода с задержанной обратной связью по току имеет два участка (рис.3.4.): первый – участок стабилизации скорости (при I < IОТС); второй – участок ограничения тока (момента) (при I ≥ IОТС).
Реализация нелинейной характеристики обратной связи (рис.3.3) осуществляется с помощью опорного напряжения и диода (рис.3.5.а) или стабилитрона (рис.3.5.б).
Изменение величины тока отсечки IОТС можно осуществить путем изменения опорного напряжения UОП.

Рис.3.3. Функциональная схема электропривода с задержанной обратной связью по току.
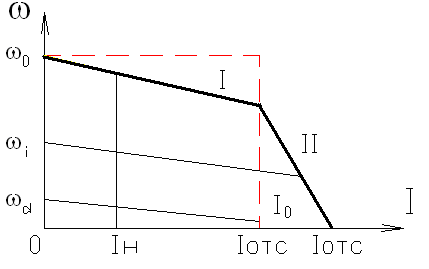
Рис.3.4. Электромеханическая характеристика электропривода с задержанной обратной связью по току.

Рис.3.5. узлы задержанных обратных связей по току: а) с использованием опорного напряжения и диода; б) с использованием стабилитрона
Ограничение тока в электроприводе постоянного тока можно получить путем использования нелинейных характеристик типа “насыщение” промежуточных усилителей.
Функциональная схема такой системы приведена на рис.3.6. Статическая характеристика усилителя А1 изображена внутри прямоугольника, обозначающего усилитель А1.
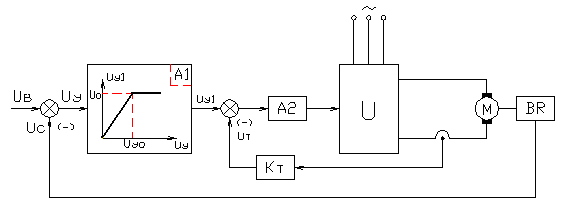
Рис.3.6. Функциональная схема электропривода с ограничением тока за счет нелинейной характеристики усилителя А1.
В установившихся режимах, когда усилитель А1 работает на линейном участке характеристики, уравнение электромеханической характеристики имеет вид:
 (3.13)
(3.13)
где КУ1, КУ2 – коэффициенты усиления усилителя А1 и А2;.
КТ – коэффициент передачи отрицательной обратной связи по току.
При повышении нагрузки до IОТС и снижении скорости (UC уменьшается, UУ - увеличивается) усилитель А1 насыщается и дальнейшее действие обратной связи по скорости исключается. В этом случае остается отрицательная связь по току, которая и ограничивает ток, уменьшая разность UУ1 – UT на выходе усилителя, а следовательно, и ЭДС преобразователя.
Уравнение электромеханической характеристики при этом имеет вид:
![]() (3.14)
(3.14)
где UОГР – напряжение ограничения на выходе усилителя А1, которое является задающим напряжением для внутреннего токового контура.
Токовый контур является системой стабилизации тока. Уравнение тока можно получить из (3.14):
 (3.15)
(3.15)
Первое слагаемое уравнение является током стопорения IСТ, а второе – отклонение тока от IСТ под действием угловой скорости вращения, которая в токовом контуре является возмущающим воздействием.
Уровень стабилизации тока определяется коэффициентом отрицательной обратной связи по току, значение которого можно получить из первого слагаемого уравнения тока:
 (3.16)
(3.16)
Так как второе
слагаемое в уравнении для КТ
величина небольшая (за счет малого
![]() и
большого КУ2КП),
то величина коэффициента обратной связи
по току КТ
определяется величиной UОГР
и требуемым током стабилизации.
и
большого КУ2КП),
то величина коэффициента обратной связи
по току КТ
определяется величиной UОГР
и требуемым током стабилизации.