

5. Синтез оптимального управления тепловым объектом
5.1. Постановка оптимального управления
Задаются:
модель динамики объекта, например:
 –линейный
вид, либо
–линейный
вид, либо
 –нелинейный
вид.
–нелинейный
вид.
функционал (критерий):
Функционал – оператор, который ставит в соответствие каждому значению функции одно число.

ограничения на y(t), u(t), tк.

Требуется определить оптимальное управление u*(t), такое, при котором объект переводится из начального состояния в конечное при выполнении ограничений, и функционал должен быть минимален. Эта задача называется задачей с закрепленными концами фазовых координат, фиксированным временным интервалом и ограничением на управление.
5.2. Определение оптимального управления
Задана
модель динамики А – звена:

Требуется
рассчитать траекторию изменения
управляющего воздействия при разогреве
теплового аппарата с минимумом затрат
энергии т.е.

если
 ,
, ,
, .
.
Получим функцию оптимального управления методом максимума Понтрягина.
Для этого максимизируем гамильтониан
 .
Берём производную по u.
Получаем
.
Берём производную по u.
Получаем
 ,
отсюда
,
отсюда ;
;
Берем производную по y
 ,
заменив
,
заменив
 получим
функцию оптимального управления
получим
функцию оптимального управления ,
гдеd
рассчитывается по формуле
,
гдеd
рассчитывается по формуле
 .
.
Параметры
модели динамики: а=
-0,0015, b=0,105,
 d
=0,0437, получаем функцию оптимального
управления
d
=0,0437, получаем функцию оптимального
управления

Реализуем работу функции оптимального управления, результаты представим в виде таблицы.
Таблица 4. Данные для построения термограмм оптимального и традиционного нагрева и траекторий изменения управляющих воздействий при традиционном и оптимальном управлении.
|
t |
y*(t) |
u*(t) |
t |
y(t) |
u(t) |
|
0 |
11,4 |
6,00E-06 |
0 |
12,9 |
1200 |
|
30 |
11,8 |
1,02E-05 |
30 |
15,9 |
1200 |
|
60 |
12,1 |
1,82E-05 |
60 |
20,5 |
1200 |
|
90 |
12,3 |
3,26E-05 |
90 |
23,7 |
1200 |
|
120 |
12,6 |
5,61E-05 |
120 |
26,6 |
1200 |
|
150 |
12,9 |
9,26E-05 |
150 |
29,5 |
1200 |
|
180 |
13,1 |
0,000146772 |
180 |
32,6 |
1200 |
|
210 |
13,3 |
0,000225722 |
210 |
35,6 |
1200 |
|
240 |
13,6 |
0,000330998 |
240 |
38,7 |
1200 |
|
270 |
13,8 |
0,000474324 |
270 |
41,5 |
1200 |
|
300 |
14 |
0,000661925 |
300 |
44,6 |
1200 |
|
330 |
14,1 |
0,000902257 |
330 |
47,1 |
1200 |
|
360 |
14,4 |
0,0012104 |
360 |
50,2 |
1200 |
|
390 |
14,6 |
0,00157897 |
390 |
53 |
1200 |
|
420 |
14,7 |
0,00204533 |
420 |
55,7 |
1200 |
|
450 |
14,9 |
0,00258808 |
450 |
58,5 |
1200 |
|
480 |
15 |
0,00325839 |
480 |
61 |
1200 |
|
510 |
15,2 |
0,00403789 |
510 |
63,5 |
1200 |
|
540 |
15,3 |
0,00496698 |
540 |
66 |
1200 |
|
570 |
15,4 |
0,00602979 |
570 |
68,3 |
1200 |
|
600 |
15,6 |
0,00727435 |
600 |
70,3 |
1200 |
|
630 |
15,7 |
0,00867887 |
630 |
72,3 |
1200 |
|
660 |
15,9 |
0,0103078 |
660 |
74,5 |
1200 |
|
690 |
16 |
0,0121279 |
690 |
76,7 |
1200 |
|
720 |
16,2 |
0,0141847 |
720 |
78,7 |
1200 |
|
750 |
16,4 |
0,0164955 |
750 |
80,6 |
1200 |
|
780 |
16,5 |
0,0191169 |
690 |
76,7 |
1200 |
|
810 |
16,7 |
0,0219818 |
720 |
78,7 |
1200 |
|
840 |
16,9 |
0,0252266 |
750 |
80,6 |
1200 |
|
870 |
17,2 |
0,0287579 | |||
|
900 |
17,4 |
0,0327119 | |||
|
930 |
17,5 |
0,0369179 | |||
|
960 |
17,7 |
0,0416759 | |||
|
990 |
18 |
0,0468003 | |||
|
1020 |
18,2 |
0,0524716 | |||
|
1050 |
18,6 |
0,0585444 | |||
|
1080 |
18,9 |
0,065248 | |||
|
1110 |
19,2 |
0,072389 | |||
|
1140 |
19,6 |
0,080102 | |||

Рис.23.
Термограммы оптимального и традиционного
нагрева.
![]()
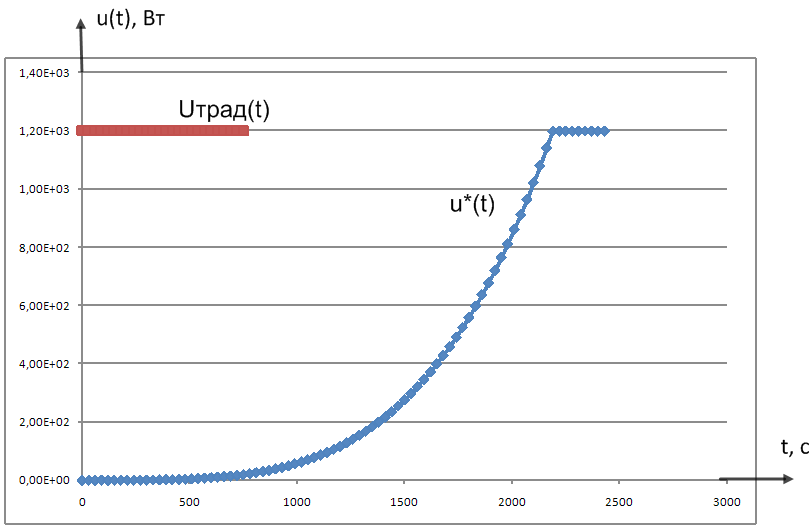
Рис.24.
Траектории изменения управляющих
воздействий при оптимальном и традиционном
нагреве.
Сравним затраты энергии при традиционном и оптимальном способах регулирования нагревом теплового объекта по расходу затрат энергии, зарегистрированных цифровым мультиметром:
1) при традиционном: 0,39039 кВт*ч.
2) при оптимальном: 0,35059 кВт*ч.
Вывод: при оптимальном способе управления тепловой объект значительно дольше нагревает жидкость до заданной температуры, однако оптимальный способ управления экономичней традиционного. В ходе лабораторной работы было показано, что экономия составила 11,3%.