

3.1. Система автоматического регулирования с п-регулятором

Рис. 11. Схема САР с П-регулятором.
Передаточная функция:

Используя найденную выше функцию корректирующего устройства исследуем нашу систему для П-регулятора.

Таким образом в качестве корректирующего устройства будем использовать:

Найдем Wсист используя функции Matlab:
W1=tf([70],[909.1 1]);
temp=70*feedback(W1*0.019,[1]);
Wsyst=minreal(temp);

Построим графики переходной функции для эталонной функции и для синтезированного нами объекта.
We=tf([70],[666.7 1]);
hold on
step(We,'-');
step(Wsyst, '--');

Рис.12. График переходной функции САР с П-регулятором и эталонного объекта.
Проведем синтез объекта в Simulink:
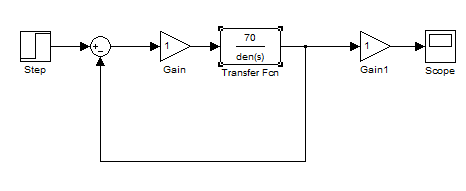
Рис. 13. Синтез САР в Simulink.

Рис.14. График переходной функции САР с П-регулятором полученный при моделировании в Simulink.
Путем несложных преобразований получим:

Отсюда
следует, что:

Модель
динамики объекта:
 подставим параметры и получим:
подставим параметры и получим:

Вывод: в результате проведенного синтеза САУ мы получили объект автоматического регулирования с пропорциональным регулятором, ошибка полученного объекта незначительна только при малых значениях t. При дальнейшем увеличении t, статическая ошибка становится сравнимой с величиной полученной функции.
Вывод: были определены параметры настройки системы автоматического регулирования с пропорциональным (П-) и пропорционально-интегральным (ПИ-) регуляторами.
3.2. Система автоматического регулирования с пи-регулятором

Рис. 15. Схема САР с ПИ-регулятором.
Передаточная функция:

Найдем Wсист используя функции Matlab:
Wo=tf([70],[909.1 1]);
temp=tf([0.0015],[1 0])/Wo;

Wky=minreal(temp);

temp=70*feedback(Wo*Wky,[1]);

Wsyst=minreal(temp);

Введем задержку в 14 сек. для нашего объекта:
p=tf('p');
p=exp(-p*14);
Построим графики переходной функции для эталонной функции и для синтезированного нами объекта, для большей наглядности введем задержку для синтезированного объекта.
We=tf([70],[666.7 1]);
Ws=Wsyst*p;
hold on
step(We,'-');
step(Ws, '--');

![]()
Рис.16. График переходной функции САР с ПИ-регулятором и эталонного объекта.
Проведем синтез этого объекта в Simulink:
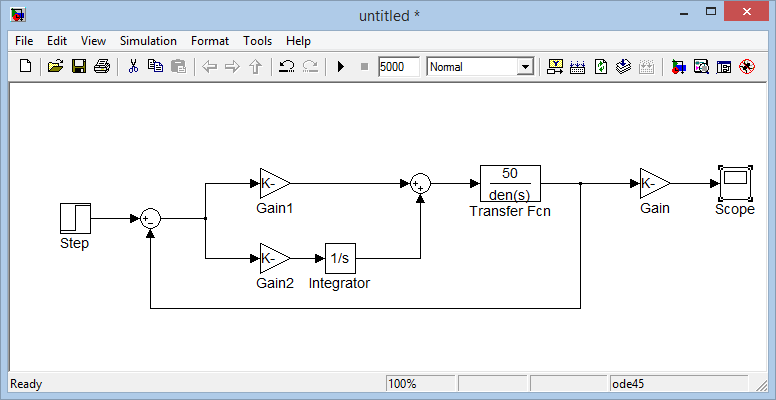
Рис. 17. Синтез САР в Simulink.

Рис.18. График переходной функции САР с ПИ-регулятором полученный при моделировании в Simulink.
Путем несложных преобразований получим:

Отсюда
следует, что:
 )
)
Модель
динамики объекта:
 подставим параметры и получим:
подставим параметры и получим:

Вывод: в результате проведенного синтеза САУ мы получили объект автоматического регулирования с пропорционально-интегральным регулятором полностью идентичный заданной нами эталонной системе.
Анализ показателей качества: статическая ошибка ПИ-регулятора меньше статической ошибки П-регулятора, следовательно, использование ПИ-регулятора даёт более точные результаты, однако время регулирования П-регулятора меньше времени регулирования ПИ-регулятора.
4.Исследование устойчивости сар
Устойчивость – это способность системы, выведенной из состояния равновесия под влиянием возмущающих или управляющих воздействий с течением времени прийти в равновесное состояние под действием своих внутренних сил.
Автоматическая система управления называется устойчивой, если она за счет своих внутренних сил возвращается в состояние установившегося равновесия после незапланированного возмущения. Систему считают неустойчивой, если при сколь угодно малых отклонениях от состояния установившегося равновесия, она не возвращается к этому состоянию, а непрерывно удаляется от него или совершает около него недопустимо большие колебания.
Устойчивость – это свойство, которым должна обладать любая САР.

Рис. 19. Структурная схема САР с ПИ-регулятором.
Запишем передаточную функцию САР в разомкнутом состоянии:
 ,
,
где
 - ПФ регулятора: ;
- ПФ регулятора: ;

 -
ПФ объекта: .
-
ПФ объекта: .


Исследуем на устойчивость синтезированный объект, охваченный единичной отрицательной обратной связью.
Wo=tf([70],[909.1 1]);
Wky=tf([0.01948 2.14e-5],[1 0]);
Wz=70*feedback(Wo*Wky,[1]);
Найдем критическую величину сдвига фазы, при которой исследуемый объект теряет устойчивость.
margin(Wz);

Рис.20. Критическая величина сдвига фазы объекта.
Найдем критическую задержку, для нашего объекта:

Построим АФЧХ объекта и объекта с запаздыванием на величину τ.
p=tf('p');
Wot=Wo*exp(-p*15);
Wraz=Wky*Wo;
Wrazt=Wky*Wot;
hold on
nyquist(Wraz);
nyquist(Wrazt);

Рис.21. АФЧХ разомкнутой системы.
Построим АФЧХ замкнутой системы.
hold on
Wz=feedback(Wraz,[1]);
Wzt=feedback(Wrazt,[1]);

Рис.21. АФЧХ замкнутой системы.

Рис.22. АФЧХ замкнутой системы (увеличенный фрагмент рис. 21.).
Устойчивость системы определяем по критерию Найквиста. Устойчивость определяется по АФЧХ разомкнутой САР, для которой возможны 2 случая:
Разомкнутая САР, устойчивая в разомкнутом состоянии, будет устойчива и в замкнутом, если её АФЧХ не охватывает точку (-1, j0) при изменении ω от 0 до ∞.
Разомкнутая САР, неустойчивая в разомкнутом состоянии, будет устойчива в замкнутом состоянии, если её АФЧХ охватывается точку (-1, j0) при изменении ω от 0 до ∞ q раз (где q – число корней характеристического уравнения разомкнутой САР).
Вывод: САР устойчива в разомкнутом состоянии, так как её АФЧХ не охватывает точку (-1, j0) при изменении ω от 0 до ∞, следовательно по критерию Найквиста (1 случай) САР будет устойчива и в замкнутом состоянии.