

1.2 Получение статических характеристик
Произведем нагрев жидкости объемом 6 литров.
Таблица
1. Исходные данные.
|
P, Вт |
y, ⁰C |
|
120 |
49 |
|
240 |
63,9 |
|
480 |
83,2 |
|
720 |
94,1 |
|
960 |
99,3 |
|
1200 |
99,8 |
Построим экспериментальную статическую характеристику yэксп(x)на рис. 4.
Найдем параметры a,bдля линейной модели (3), решив систему уравнений (4) используя возможностиMatlab:

A=[6,3720; 3720,3182400];
B=[489.3; 343992];
X=A\B
X =
52.7964
0.0464
Решение системы уравнений: a=52,7964; b=0,0464.
Получим линейную модель нагрева воды:
y=52,7964+0,0464x
Построим график линейной модели yлин мод(x) на рис. 4.
Найдем параметры a,b,cдля нелинейной (квадратическая интерполяция) модели (5), решив систему (6) используя системуMatlab:

A=[6,3720,3182400; 3720,3182400,3112128000; 3182400,3112128000, 3.2482944e12];
B=[489.3; 343992; 177779520];
X=A\B;
X= 36.1505; 0.1249; -0.00006.
Решение системы уравнений: a=36,1505; b=0,1249; c= -6,03610-5.
Получаем модель нагрева воды:

 .
.
Построим график нелинейной модели yнелин. мод.(x)на рис.4.
Рис.4.
Статические характеристики, построенные
по экспериментальным данным и рассчитанные
по моделям.
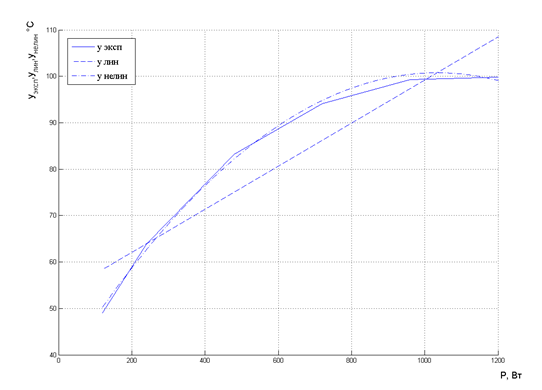
yэксп(x) – статическая характеристика, построенная по экспериментальным данным.
yлин (x) – статическая характеристика, построенная по линейной модели объекта.
yнелин (x)– статическая характеристика, построенная по нелинейной модели объекта °C.
Таблица 2. Исходные данные, модели и погрешности
|
P, Вт |
y эксп , °C |
y лин , °C |
y нелин, °C |
|y эксп – y лин|,°C |
|y эксп – y нелин|,°C |
|
120 |
49 |
58,3644 |
50,26932 |
9,3644 |
1,269316 |
|
240 |
63,9 |
63,9324 |
62,64976 |
0,0324 |
1,250236 |
|
480 |
83,2 |
75,0684 |
82,19556 |
8,1316 |
1,004444 |
|
720 |
94,1 |
86,2044 |
94,78788 |
7,8956 |
0,687876 |
|
960 |
99,3 |
97,3404 |
100,4267 |
1,9596 |
1,126724 |
|
1200 |
99,8 |
108,4764 |
99,1121 |
8,6764 |
0,6879 |
Вывод: экспериментальным методом было произведено исследование зависимости между выходной и входной переменными объекта управления в статических режимах. Были получены следующие модели:
линейная – y=52,7964+0,0464x
нелинейная
–y=36,1505+0,1249x–6,03610-5x2

Нелинейная модель описывает объект точнее, чем линейная, так как максимальная абсолютная погрешность между моделью и экспериментальными данными в случае нелинейной модели(∆y=1,2693°C) меньше таковой в случае линейной модели (∆y=9,3644°C).
2. Определение динамических характеристик объекта управления
Ознакомимся с методами определения динамических характеристик по экспериментальным данным.
2.1. Общие теоретические сведения
Динамические характеристики определяют связь между входными и выходными переменными в динамических режимах. В теории автоматического управления используют следующие динамические характеристики:
Дифференциальные и интегральные уравнения;
Передаточные функции;
Частотные характеристики;
Временные характеристики.
2.1.1. Дифференциальные уравнения.
Используют следующие формы записи дифференциальных уравнений:
«Вход-выход» :
 (7)
(7)
- дифференциальное уравнение n-го порядка.
Объект стационарный, так как его параметры ai и b не зависят от времени.
Каноническая (нормальная) форма записи дифференциального уравнения (в пространстве состояний):
дифференциальное уравнение n-го порядка в нормальной форме имеет вид:
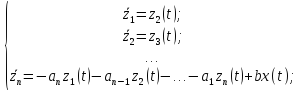
zi – переменная состояния (фазовая координата),
при
этом
 и так далее.
и так далее.
Векторно-матричная форма:

где AиB– матрицы параметров.
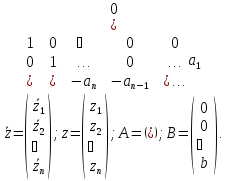
z– вектор-столбец фазовых координат размерностьюn,
A– матрица параметров размерностиn*n,
B– матрица параметров размерностиn*m(m– размерность входаx).
Для дифференциального уравнения 2-го порядка:

Дифференциально-разностная (дискретная) форма.
При расчете динамических режимов на ЭВМ и микропроцессорных системах управления используется дискретная форма записи.

Δt– шаг дискретизации по времени,
z(i),x(i) – значения вектораzи входаxнаi-м шаге,
F,G–матрицы размерностейn*nиn*mсоответственно, зависящие от Δt.
Предполагается, что в пределах шага Δtзначение входаxне изменяется.