

Rabochaya_tetrad
.pdfКачество автоматического регулирования можно оценить следующими показателя-
ми:___________________________________________________________________
______________________________________________________________________
______________________________________________________________________
____________________________________________________________
Законом автоматического регулирования называется ____________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
В практике автоматического регулирования используются следующие законы регулирования:
Поз - _____________________________, П - ______________________________, И - ______________________________, ПИ - ____________________________
________________, ПД-_________________________________________________, ПИД - ________________________________________________________________.
Наличие статической ошибки регулирования характерно для
__________________________ регулятора.
ПИД-регулятор имеет следующие параметры настройки:
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
5.3 Исследование работы системы двухпозиционного регулирования
Двухпозиционным называется такое регулирование_____________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
Дифференциалом регулятора называется_______________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
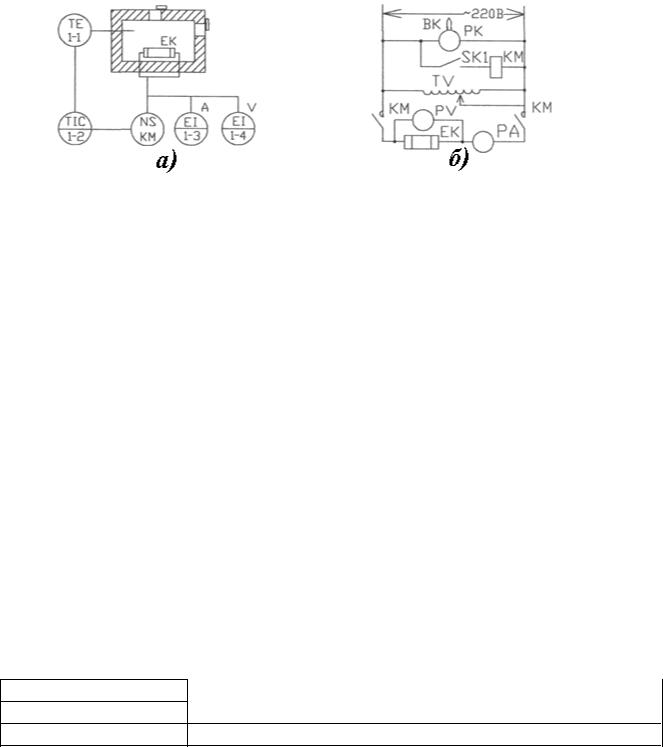
На рисунке 5.2 изображены функциональная и электрическая принципиальная схемы двухпозиционной АСР температуры на базе микропроцессорного из- мерителя-регулятора ТРМ-1.
Рисунок 5.2 – Схемы двухпозиционной АСР температуры в печи
а) – функциональная схема; б) – электрическая принципиальная схема;
1.1- _______________________________; 1.2 - _____________________________;
1.3- _______________________________; 1.4 - _____________________________; ВК - _______________________________; ЕК -______________________________; КМ - _________________________________; РА - ___________________________; РК________________________________; PV - _____________________________; SK1 - ___________________________________; TV - ________________________.
Заданное значение температуры установлено t0 = ________0C, дифференциал регулятора установлен t = _______0С. Параметры электропитания печи: I=_____А, U = _______В, N = _______Вт.
Результаты наблюдения за работой АСР приведены в таблице 5.1.
Таблица 5.1 – Изменение температуры и мощности, подводимой к печи, в процессе двухпозиционного регулирования
Время τ , мин
Температура t, 0С
Мощность N, Вт
График процесса регулирования приведен на рисунке 5.3.
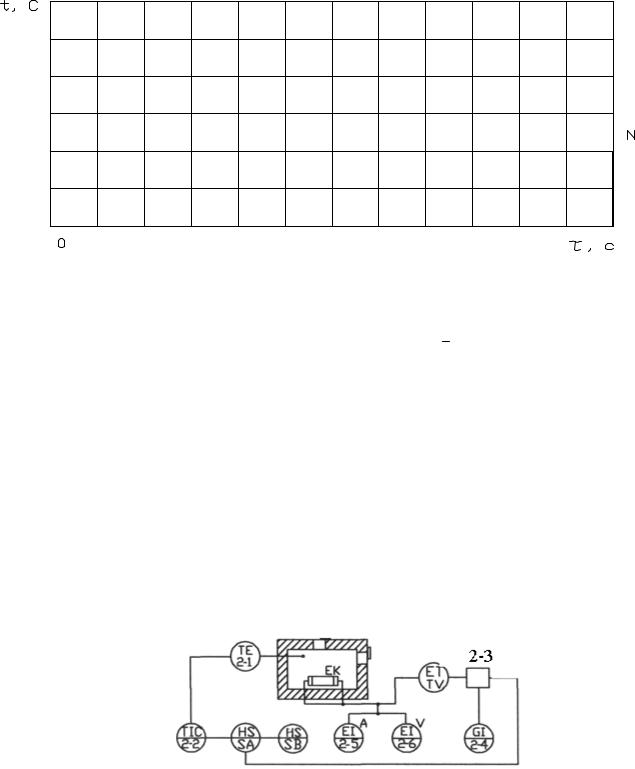
Рисунок 5.3 – График процесса двухпозиционного регулирования
По графику t = f (τ ) период колебаний составил τ = _________ мин, ампли-
туда колебаний |
|
= _________ 0С. |
t |
5.4 Исследование работы системы ПИД-регулирования
Работа регулятора по ПИД-закону описывается следующим выражением
______________________________________________________________________
______________________________________________________________________
Функциональная схема системы ПИД-регулирования температуры в лабораторной печи изображена на рисунке 5.4.
Рисунок 5.4 – Функциональная схема системы ПИД-регулирования
2.1- ______________________________; 2.2- _______________________________;
2.3- ___________________________________; 2.4____________________________
________________________________; 2.5- _________________________________; 2.6 - ______________________________; ЕК_______________________________; SA - ________________________________; SB - ____________________________; TV - _____________________________________.
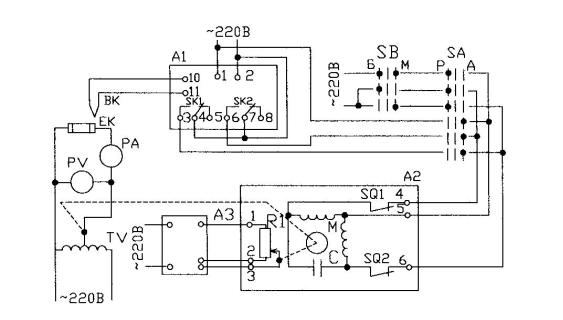
На рисунке 5.5 изображена электрическая принципиальная схема той же АСР. В качестве регулятора используется микропроцессорный прибор типа ТРМ12.
Рисунок 5.5 – Принципиальная схема системы ПИД-регулирования.
А1___________________________; А2_______________________________; А3_________________________________; ВК -____________________________; С -_____________________________; ЕК-_________________________________; М -______________________________; РА -________________________________; PV - ________________________________; R1 - __________________________; SA - ______________________________; SB - ____________________________; SQ1,SQ2 -__________________________; TV - ______________________________.
В таблице 5.2 приведены результаты исследования работы исполнительного узла АСР
Таблица 5.2 – Зависимость параметров питания электропечи от угла поворота вала исполнительного механизма
Угол поворота |
0 |
20 |
40 |
60 |
80 |
100 |
вала α , % |
|
|
|
|
|
|
Ток I, А |
|
|
|
|
|
|
Напряжение U, В |
|
|
|
|
|
|
Мощность N, Вт |
|
|
|
|
|
|
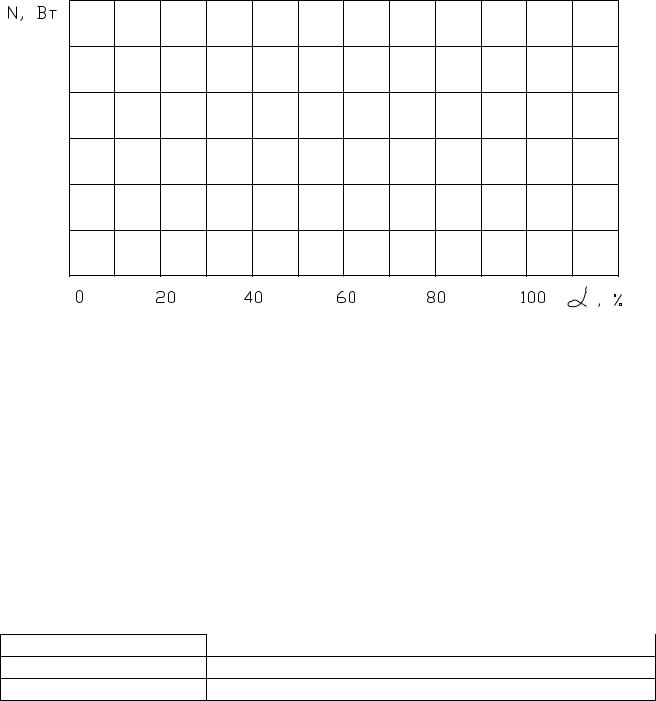
На рисунке 5.6 изображена статическая характеристика исполнительного узла, настроенная по данным таблицы 5.2.
Рисунок 5.6 – Статическая характеристика исполнительного узла АСР
Параметры настройки регулятора ТРМ12 в процессе исследования работы АСР имеют следующие значения: К = ______, τ =______; s = _______.
Заданное значение температуры составляло Туст = _______ 0С. Результаты наблюдения за работой АСР приведены в таблице 5.3.
Таблица 5.3 – Изменение температуры и мощности, подводимой к печи в процессе ПИД-регулирования
Время, τ , мин
Температура, t, 0С
Мощность N, Вт
График процесса регулирования, построенный по данным таблицы 5.3, изображен на рисунке 5.7
Рисунок 5.7 – График процесса регулирования температуры ПИД-регулятором
5.5 Выводы по работе
__________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
Лабораторная работа №6
Исследование работы автомата АП-3М
6.1Целью лабораторной работы является ознакомление с устройством и принципом действия автомата для приготовления пончиков АП-3М, изучение принципиальной электрической схемы системы управления автоматом и наблюдение за взаимодействием элементов системы в ходе технологического процесса.
6.2Назначение и основные технические данные автомата АП-3М
Автомат АП-3М предназначен
_________
______________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
Производительность автомата |
___; вес готового пончика |
__ ; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
время жарки пончика |
|
; давление воздуха в баке для теста |
|
|
|
|
; |
|||||
рабочая температура масла |
|
|
|
; общая мощность ТЭНов |
|
|
; |
|||||
расход электроэнергии на выпечку одного пончика |
|
. |
|
|
|
|||||||
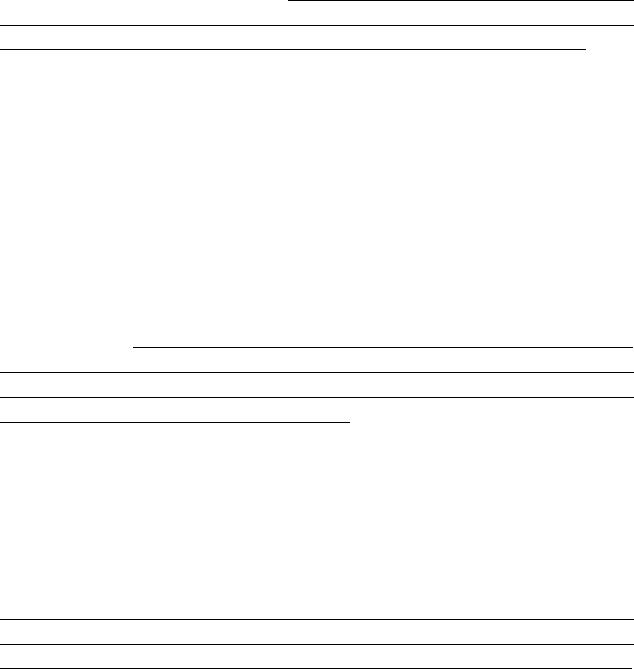
Функциональная схема системы управления АП-3М изображена на рисунке 6.1. В соответствии с функциональной схемой система управления решает следующие задачи:
__________________________________
______________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
_______________
|
Рисунок 6.1 – Функциональная схема системы управления |
|
|||
1а - |
|
____________; 1б - |
|
__ |
_; |
1в - _______________________________; 2а -_____________________________; 3а - _________________________________; 4а - ___________________________; ЕК - _______________________________; HL2 - ___________________________; КК1, КК2 - _________________________; КМ1, КМ2 - ______________________; М1 - _______________________________; М2 - ____________________________; М3 - ____________________________; SA1…SA3 - _________________________; SB1, SB2 - ____________________; YA1__________________________________.
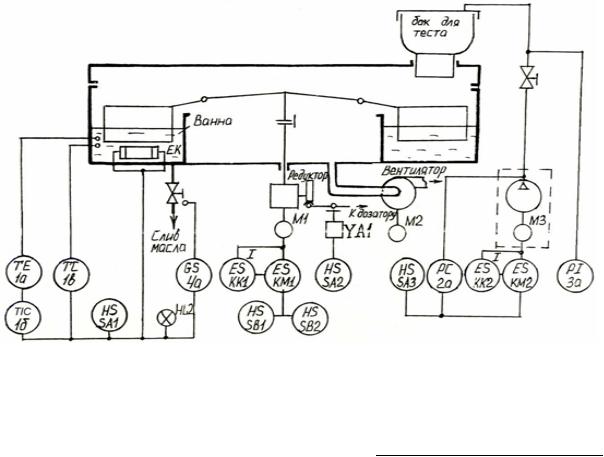
На рисунке 6.2 изображена электрическая принципиальная схема системы управления АП-3М.
Последовательность подготовки автомата к работе________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
Рисунок 6.2 – Принципиальная электрическая схема системы управления
ВК - |
|
|
|
;С1, С2 - |
____ |
|
______; |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
; HL1, HL2 - ________ |
|
|
_; |
||||||
ЕК1…ЕК3 - |
|
|
|
|
|
|
|
|
|
|||||||||||||
К1…К3 - |
|
|
|
|
|
|
|
|
КК1, КК2 - |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
; КМ1, КМ2 - |
|
|
|
|
; |
|
|||||||||
|
|
|
|
|
|
|
; М1…М3 - |
|
|
_ |
; |
|
||||||||||
РК - |
|
|
|
; QF1, QF2 - |
|
|
|
; |
||||||||||||||
R1…R5 - |
|
|
|
; SA1…SA3 - |
|
|
|
; |
||||||||||||||
SB1 – |
|
__________________; SB2 - |
|
|
|
_; |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
SK1 - |
|
|
|
|
|
; SK2 - |
|
|
|
|
______; |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
SP1 - |
|
|
|
___; SQ1 - |
|
|
|
; |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
VD1…VD3 - |
|
|
; VS1…VS3 - |
|
|
|
_; |
|||||||||||||||
YA1 - |
. |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6.3 Исследование работы системы управления АП-3М
6.3.1 Исследование работы системы регулирования давления воздуха в баке для теста показало, что при давлении Рmax= ________ МПа реле давления отключает компрессор, при падении давления до Рmin= ________ МПа компрессор включается. Таким образом дифференциал системы регулирования составляет Р=
_______МПа. Для регулирования использован ________________________ закон
регулирования. Статическая характеристика регулятора давления приведена на рисунке 6.3.
Рисунок 6.3 – Статическая характеристика регулятора давления
Результаты наблюдения за работой системы регулирования температуры масла (в имитационном режиме) приведены в таблице 6.1.
Система работает по ___________________________________________ закону регулирования. Заданные значения температуры были установлены в пределах
tmax= _________0C, |
tmax= __________0C, tmin= __________0C, |
|
tmin= ____________0C, |
t = ____________0C. |
|
Таблица 6.1 – Изменение температуры и параметров питания ТЭНов в процессе регулирования
Время, τ, мин
Температура, t, 0С
Ток, I, А
Напряжение, U, В
Мощность, N, Вт