

6.3. Сфера застосування двоїстого симплекс-методу
1. Розв’язок ЗЛП безпосередньо. Двоїстий симплекс-метод може безпосередньо застосовуватися для розв’язання тільки певного класу задач. У цих задачах знаки коефіцієнтів цільової функції та знаки обмежень не можуть бути довільними.
Значення коефіцієнтів цільової функції:
а) якщо цільова функція мінімізується, то всі коефіцієнти цільової функції повинні бути невід’ємними: cj 0;
б) якщо цільова функція максимізується, то всі коефіцієнти цільової функції мають бути недодатними: cj 0.
Знаки обмежень. Обмеження початкової ЗЛП з невід’ємними компонентами вектора b повинні мати лише знаки "" і "" (але не всі одночасно типу "").
2. Розв’язок ЗЛП у випадках, коли після одержання оптимального розв’язку в задачу вводиться нове (додаткове) обмеження (найбільш важлива сфера застосування).
Параметричне програмування – це метод визначення, яким чином зміниться розв’язок задачі: чи зміною вектора коефіцієнтів ЦФ, чи зміною вектора обмежень.
6.4. Приклад застосування двоїстого симплекс-методу
Приклад 6.1. Розв’яжемо ЗЛП двоїстим симплекс-методом:
min z = x1 + x2; (6.8)
![]() ; (6.9)
; (6.9)
![]() ; (6.10)
; (6.10)
![]() ; (6.11)
; (6.11)
![]() . (6.12)
. (6.12)
Зведемо спочатку всі обмеження до типу ””; для цього нерівності типу “” помножимо на –1:
![]() ;
;
![]() ;
;
![]() .
.
А тепер у кожне з них введемо відповідну залишкову змінну:
![]() ;
;
![]() ;
;
![]() .
.
Ітерація 1. Початковий базисний розв’язок (недопустимий) задачі такий:
 =
= .
.
На рис. 6.1 цей розв’язок відповідає точці А (0, 0).
Заповнюємо симплекс-таблицю (табл. 6.2).
Таблиця 6.2
|
Базисні змінні |
x1 |
x2 |
s1 |
s2 |
s3 |
Розв’язок |
|
z |
-1 |
-1 |
0 |
0 |
0 |
0 |
|
s1 |
-2 |
-1 |
1 |
0 |
0 |
-4 |
|
s2 |
-1 |
-2 |
0 |
1 |
0 |
-4 |
|
s3 |
1 |
1 |
0 |
0 |
1 |
10 |
Значення залишкових змінних не забезпечують одержання допустимої стартової точки прямої задачі, але всі елементи z-рядка (dj) є недодатними — умова оптимальної задачі на мінімізацію виконується.
Крок 1. Вибираємо змінну, що виводиться з множини базисних
За умовою допустимості за виводжувану з базису змінну вибирається найбільша за модулем від’ємна базисна змінна. Таких змінних дві: s1 = –4; s2 = –4. У цьому випадку можна вибрати будь-яку змінну. Виберемо змінну s2.
Крок 2. Вибираємо змінну, що вводиться у множину базисних
За умовою оптимальності змінна, що вводиться у базис, вибирається з небазисних таким чином: обчислюються відношення коефіцієнтів лівої частини z-рівняння до відповідних коефіцієнтів рівняння, яке відповідає виводжуваній змінній. Відношення з додатними або нульовими значеннями знаменника не враховуються. У задачі на мінімізацію змінній, що вводиться, повинне відповідати найменше з вказаних співвідношень (табл. 6.3). У задачі на максимізацію вибираємо відношення, найменше за абсолютною величиною:
Таблиця 6.3
|
Базисні змінні |
x1 |
x2 |
s1 |
s2 |
s3 |
Розв’язок |
|
Z |
-1 |
-1 |
0 |
0 |
0 |
0 |
|
s2 |
-1 |
-2 |
0 |
1 |
0 |
-4 |
|
Відношення |
1 |
1/2 |
— |
— |
— |
— |

Обчислюємо = min{1,1/2} = 1/2, тобто вводимо до базису змінну x2.
Крок 3. Виконаємо операцію заміщення, використовуючи перетворення Жордана-Гаусса (тобто звичайні симплекс-перетворення) (табл. 6.4).
Таблиця 6.4
|
Базисні змінні |
x1 |
x2 |
s1 |
s2 |
s3 |
Розв’язок |
|
z |
-1/2 |
0 |
0 |
-1/2 |
0 |
2 |
|
s1 |
-3/2 |
0 |
1 |
-1/2 |
0 |
-2 |
|
x2 |
1/2 |
1 |
0 |
-1/2 |
0 |
2 |
|
s3 |
1 |
0 |
0 |
1/2 |
1 |
8 |
Новий базисний розв’язок відповідає точці В (2, 0) (рис. 6.1).
Ітерація 2
Крок 1. Вибираємо змінну, що виводиться з множини базисних.
Розв’язок ще не допустимий (s1 = –2). За умовою допустимості за змінну, що виводиться з базису, вибираємо змінну s1.
Крок 2. Вибираємо змінну, що вводиться до базису (табл. 6.5).
Таблиця 6.5
|
Базисні змінні |
x1 |
x2 |
s1 |
s2 |
s3 |
Розв’язок |
|
z |
-1/2 |
0 |
0 |
-1/2 |
0 |
2 |
|
s1 |
-3/2 |
0 |
1 |
-1/2 |
0 |
-2 |
|
x2 |
-1 |
1 |
0 |
-1/2 |
0 |
2 |
|
s3 |
1 |
0 |
0 |
1/2 |
1 |
8 |
|
Відношення |
1/3 |
— |
— |
1 |
— |
|
Обчислюємо = min{1/3, 1} = 1/3, тобто вводимо до базису змінну x1.
Крок 3.Виконуємо операцію заміщення (табл. 6.6).
Таблиця 6.6
|
Базисні змінні |
x1 |
x2 |
s1 |
s2 |
s3 |
Розв’язок |
|
z |
0 |
0 |
-1/3 |
-1/3 |
0 |
8/3 |
|
x1 |
1 |
0 |
-2/3 |
1/3 |
0 |
4/3 |
|
x2 |
0 |
1 |
1/3 |
-2/3 |
0 |
4/3 |
|
s3 |
0 |
0 |
1/3 |
1/3 |
1 |
22/3 |
Розв’язок, що є оптимальним і допустимим, відповідає точці С(4/3, 4/3).
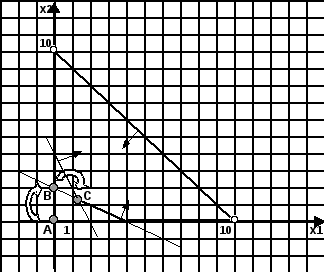
Рис. 6.1