

2.4.2. Обоснование круговой диаграммы асинхронной машины
В основу построения круговой диаграммой положим упрощенную схему замещения (рис.2.8).
 ,
где
,
где
 .
.
Ток
 отстает от
напряжения на угол
отстает от
напряжения на угол
 . Так как
. Так как ,
то
,
то .
Так как
.
Так как ,
то для определения закона изменения
тока
,
то для определения закона изменения
тока при изменении скольжения в пределах
при изменении скольжения в пределах ,
нужно определить закон изменения тока
,
нужно определить закон изменения тока .
.
Запишем выражение полного сопротивления или рабочего контура схемы замещения:
 .
.
Уравнение напряжения для этого контура
 .
.
Разделим обе части
последнего уравнения на
 получим
получим
 .
.
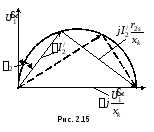
Это уравнение есть
совокупность трех векторов, образующих
прямоугольный треугольник с гипотенузой
 .
Выполним построение для произвольного
значения скольжения (рис. 2.15).
.
Выполним построение для произвольного
значения скольжения (рис. 2.15).
Если выполнить
такое построение для нескольких значений
 ,
то получим семейство прямоугольных
треугольников, вершины прямых углов
которых скользят по окружности с
диаметром
,
то получим семейство прямоугольных
треугольников, вершины прямых углов
которых скользят по окружности с
диаметром .
Следовательно, при изменении скольжения
в указанных выше пределах, конец вектора
.
Следовательно, при изменении скольжения
в указанных выше пределах, конец вектора скользит
по окружности. Так как
скользит
по окружности. Так как
 ,
где
,
где ,
то и конец вектора
,
то и конец вектора будет
скользить по той же окружности. Для
получения вектора
будет
скользить по той же окружности. Для
получения вектора
 следует к
концу вектора
следует к
концу вектора
 пристроить начало вектора
пристроить начало вектора .
.
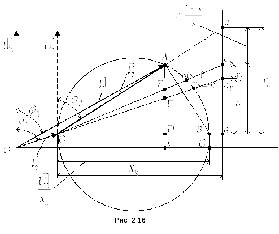
2.4.3. Характерные точки круговой диаграммы асинхронной машины
Проведем отрезок
Ов
параллельной оси абсцисс в масштабе
сопротивления
 (рис.2.16), т.е
(рис.2.16), т.е
 . Из точки
в
восстановим перпендикуляр к этой прямой
(ва
перпендикулярна Ов). Далее продолжим
вектор
. Из точки
в
восстановим перпендикуляр к этой прямой
(ва
перпендикулярна Ов). Далее продолжим
вектор
 до пересечения с указанным перпендикуляром
в точкеа.
Получим два подобных треугольника
до пересечения с указанным перпендикуляром
в точкеа.
Получим два подобных треугольника
 .
Из этого подобия легко установить, что
.
Из этого подобия легко установить, что и
и .
При уменьшении
скольжения
.
При уменьшении
скольжения
 ,
точкаа
поднимается к верху, а точка А
будет скользить по окружности против
часовой стрелки. При
,
точкаа
поднимается к верху, а точка А
будет скользить по окружности против
часовой стрелки. При
 точкаа
уходит в ∞, а точка А
совпадет с точкой О.
точкаа
уходит в ∞, а точка А
совпадет с точкой О.
При увеличении
скольжения
 точкаа
будет скользить вниз и при
точкаа
будет скользить вниз и при
 совпадает с точкой
совпадает с точкой .
ТочкаА
перемещаясь по часовой стрелке совпадет
с точкой К
(
.
ТочкаА
перемещаясь по часовой стрелке совпадет
с точкой К
( ).
Таким образом, участок окружностиОАК
соответствует изменению скольжения от
0 до 1, т.е. режиму двигателя. При увеличении
скольжения
).
Таким образом, участок окружностиОАК
соответствует изменению скольжения от
0 до 1, т.е. режиму двигателя. При увеличении
скольжения
 от 1 до +∞ точкаа
перемещается вниз и при
от 1 до +∞ точкаа
перемещается вниз и при
 совпадет с точкой
совпадет с точкой .
При этом точкаА
скользит по участку окружности КТ,
что соответствует режиму электромагнитного
тормоза. При изменении скольжения в
пределах от –∞ до 0 с уменьшением
абсолютно значения скольжения точка а
продолжает перемещаться вниз, причем
точка А
скользит по нижней части окружности.
При
.
При этом точкаА
скользит по участку окружности КТ,
что соответствует режиму электромагнитного
тормоза. При изменении скольжения в
пределах от –∞ до 0 с уменьшением
абсолютно значения скольжения точка а
продолжает перемещаться вниз, причем
точка А
скользит по нижней части окружности.
При
 точкаа
уходит в бесконечность, а точка А
приходит в точку О.
Следовательно, участок ТВО
соответствует режиму генератора.
точкаа
уходит в бесконечность, а точка А
приходит в точку О.
Следовательно, участок ТВО
соответствует режиму генератора.
2.4.4. Определение величин, характеризующих работу
асинхронной машины по круговой диаграмме
Подводимая мощность
 ,
т. е.
,
т. е. ,
,
где
 – масштаб мощности.
– масштаб мощности.
 –называется
линией подводимой мощности (
–называется
линией подводимой мощности ( ).
Мощность, потребляемая АМ при синхронном
холостом ходе идет на покрытие магнитных
потерь. Их определяют отрезком
).
Мощность, потребляемая АМ при синхронном
холостом ходе идет на покрытие магнитных
потерь. Их определяют отрезком :
:
 или
или
 .
.
Мощность, выделяющаяся в рабочем контуре:
 или
или
 .
.
Далее учтем, что
 .
.
Отсюда будем иметь:
 ,
,
 .
.
Полная механическая мощность машины будет
 .
.
Прямая ОК
, в соответствии с этим, называется
линией полной механической мощности
( ).
).
 .
.
Следовательно,
линию ОТ
называют линией электромагнитной
мощности ( ).
Она является также линией электромагнитных
моментов, так как
).
Она является также линией электромагнитных
моментов, так как
 ,
,
где
 – масштаб моментов.
– масштаб моментов.
 .
.
Для построения
рабочих характеристик задаются
несколькими значениями
 и определяют все величины.
и определяют все величины.