

2.7.2. Частотное регулирование
Формула максимального момента АД имеет вид
 .
.
Если
учесть
 ,
и принятьс1=1,
r1=0,
то
,
и принятьс1=1,
r1=0,
то
 .
.
Если
учесть, что
 и
и ,
то
,
то
 ,
где
,
где
 (2.16)
(2.16)
Таким образом, с изменением питающей частоты изменяется Мm, что вызывает изменение перегрузочной способности.
Для обеспечения устойчивой работы АД при частотном регулировании, следует перегрузочную способность, то есть краткость максимального момента оставлять постоянной, т. е.
 .
(2.17)
.
(2.17)
Здесь
индексы «1» и «2» относятся к разным
частотам
 и
и .
.
Согласно (2.15) имеем
 ,
,
откуда
 ,
(2.18)
,
(2.18)
здесь Мн1 и Мн2 – нагрузочные моменты при разных частотах.
Выражение (2.18) – закон частотного регулирования в общем случае.
Если регулирование осуществляется при постоянном нагрузочном моменте, то
 или
или
 .
.
В этом случае напряжение питания изменяется пропорционально изменению питающей частоты.
Регулирование
осуществляется при постоянной мощности
 .
Так как
.
Так как ,
, ,
то
,
то .
.
После подставки отношения моментов в выражение (2.18) получим
 .
.
2.7.3. Регулирование частоты вращения асинхронного двигателя
переключением числа пар полюсов.
Так
как
 ,
топереключением
числа пар полюсов
р можно
изменить
,
топереключением
числа пар полюсов
р можно
изменить
 ступенчато. При этом частота вращения
ротора
ступенчато. При этом частота вращения
ротора будет изменяться также ступенчато.
Изменение числа пар полюсов осуществляется:
будет изменяться также ступенчато.
Изменение числа пар полюсов осуществляется:
1) размещением в пазах статора нескольких обмоток,
2) размещением в пазах статора обмотки специального типа с переключением числа пар полюсов р.
Первый
способ менее выгоден по условиям
размещения обмоток. АД с переключением
числа р
называют многоскоростными. В двухскоростных
АД изменение числа пар полюсов производится
в отношении
 ,
где
,
где – удвоенное
число пар полюсов;
– удвоенное
число пар полюсов;
 – одинарное число пар полюсов. При
переходе от большего числа
– одинарное число пар полюсов. При
переходе от большего числа к меньшему
к меньшему ,
относительный шаг обмотки изменяется
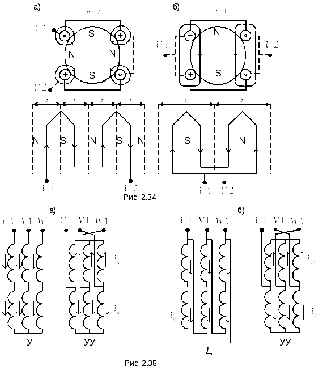
от 1 до 0,5. Изменениер
осуществляется благодаря тому, что
каждая фаза обмотки выполняется из двух
полуфаз (рис. 2.34). При изменении р
в одной из полуфаз направление тока
меняется на противоположное. Следовательно,
изменение р
можно достичь изменением направления
тока в одной из полуфаз.
,
относительный шаг обмотки изменяется
от 1 до 0,5. Изменениер
осуществляется благодаря тому, что
каждая фаза обмотки выполняется из двух
полуфаз (рис. 2.34). При изменении р
в одной из полуфаз направление тока
меняется на противоположное. Следовательно,
изменение р
можно достичь изменением направления
тока в одной из полуфаз.
В
трехфазной обмотке при переключении р
изменяется и схема соединения фазных
обмоток. Наиболее употребительна схема
переключения

(рис.
2.35). На рис. 2.35,а изображена схема обмотки
статора, которая в процессе переключения
 на
на переключается с У на УУ, переключение
с Д на УУ изображено (см. рис. 2.35,б).
переключается с У на УУ, переключение
с Д на УУ изображено (см. рис. 2.35,б).
Допустим,
что переключение осуществляется при
 и наибольшем допустимом фазном токе
и наибольшем допустимом фазном токе .
Если пренебречь изменением условий
охлаждения при изменении частоты
вращения и считая ток
.
Если пренебречь изменением условий
охлаждения при изменении частоты
вращения и считая ток ,
а также одинаковыми КПД и
,
а также одинаковыми КПД и ,
то выражения для полезных мощностей
при одинарном и удвоенном числе пар
полюсов для схемы, изображенной на
рис.2.35,а соответственно будут:
,
то выражения для полезных мощностей
при одинарном и удвоенном числе пар
полюсов для схемы, изображенной на
рис.2.35,а соответственно будут:
 и
и
 ,
,
следовательно,
 ,
но
,
но
 ,
то
,
то .
.
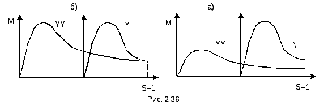
Таким образом, рассматриваемая схема рис. 2.35,а обеспечивает регулирование при постоянном моменте (рис. 2.36,а).
Аналогично для схемы (рис. 2.35,б
 ,
,
 ,
,
 .
.
В
данном случае обеспечивается регулирование
при постоянной мощности (рис. 2.35,б) .
.
2.7.4. Регулирование частоты вращения асинхронного двигателя
изменением величины первичного напряжения
 .
.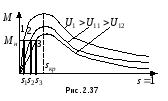
Изменение подводимого напряжения вызывает существенное изменение момента АД. При различных величинах первичного напряжения характеристики M=f(s) имеют различный вид (рис. 2.37).
Как
следует (см. рис.2.37), с уменьшением
напряжения двигатель переходит с одной
механической характеристики на другую.
При этом он работает последовательно
в точках 1; 2; 3, которым соответствуют
скольжения
 .
Предполагается
.
Предполагается .
Таким образом,c
уменьшением U1
скольжение АД растет, а частота вращения
уменьшается
.
Таким образом,c
уменьшением U1
скольжение АД растет, а частота вращения
уменьшается
 .
.
Предел
изменения скольжения в данном случае
ограничивается его критическим значением
 .
С целью расширения этого предела
применяют АД с повышенным скольжением.
Известно, что с увеличением активного
сопротивление ротора максимальный
момент
.
С целью расширения этого предела
применяют АД с повышенным скольжением.
Известно, что с увеличением активного
сопротивление ротора максимальный
момент смещается в сторону больших скольжений
и
смещается в сторону больших скольжений
и увеличивается. При этом пределы изменения
скольжения при
увеличивается. При этом пределы изменения
скольжения при и пределы изменения частоты вращения
увеличиваются.
и пределы изменения частоты вращения
увеличиваются.
Так
как рассматриваемый способ регулирования
связан с увеличением скольжения при
уменьшении напряжения питания
 ,
то он является не экономичным, так как
связан с большими потерями в обмотке
ротора, в которой выделяются потери
скольжения:
,
то он является не экономичным, так как
связан с большими потерями в обмотке
ротора, в которой выделяются потери
скольжения: .
Поэтому этот способ применяется редко
и лишь для АД малой мощности.
.
Поэтому этот способ применяется редко
и лишь для АД малой мощности.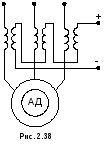
Изменение частоты вращения АД можно осуществлять с помощью регулируемого АТ или регулируемых сопротивлений, включенных в цепь статора.
Для малых двигателей часто используются изменения подводимого напряжения с помощью реакторов насыщения, управляемых за счет изменения степени подмагничивания постоянным током (рис.2.38). В данном случае при изменении степени подмагничивания изменяется степень насыщения реактора, что сопровождается изменением его индуктивного сопротивления, а следовательно, и частоты вращения АД.