

5.4. Поверки оптического нивелира
Перед началом работы с нивелиром необходимо убедиться, что взаимное положение осей прибора соответствует его принципиальной конструктивной схеме. Для этого выполняются поверки нивелира.
Поверка 1. Ось круглого уровня должна быть параллельна оси вращения инструмента.
Круглый уровень устанавливается между любыми двумя подъемными винтами и вращением всех трех подъемных винтов пузырек круглого уровня приводится в нульпункт. Затем поворачивают уровень на 180°. Если уровень остался в нульпункте, условие выполнено. В противном случае требуется исправление. Пузырек круглого уровня приводится в нульпункт: на половину дуги отклонения с помощью исправительных винтов круглого, а на оставшуюся половину -подъемными винтами. Затем уровень поворачивают на 90° и выполняют поверку в направлении третьего подъемного винта. Поворачивают инструмент на 180° относительно направления третьего подъемного винта и, если пузырек уровня при этом смещается с нульпункта, приводят его к нульпункту на половину дуги отклонения исправительным винтом, а на половину — подъемным винтом (круглый уровень имеет 3 исправительных винта).
Поверка
2. Визирная
ось зрительной трубы должна быть
параллельна
оси цилиндрического уровня.
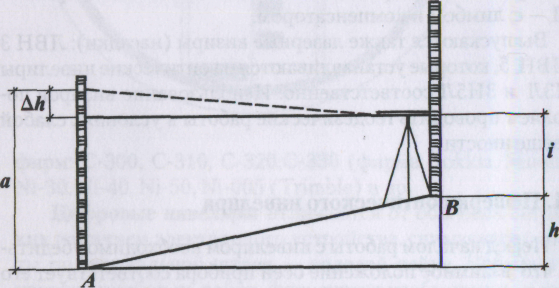
Это основная поверка нивелира. Она выполняется двойным нивелированием. Превышение между точками определяется дважды способом нивелирования вперед (рис. 43). Вначале инструмент устанавливается в точке A, измеряется высота инструмента — iA берется отсчет по рейке, у становленной в точке В — b. Затем инструмент и рейка меняются местами, измеряется высота инструмента в точке В — i'в и определяется отсчет по рейке, установленной в точке А — а. Погрешность превышения Δh, вызванная непараллельностью осей вычисляется из выражения:
![]()
Если величина Δh не превышает 5 мм, условие выполнено. В противном случае производится исправление. Вычисляется исправленное значение отсчета по рейке: aис = а — Δh. Этот отсчет устанавливается с помощью элевационного винта. При этом пузырек цилиндрического уровня смещается с нульпункта. Действуя исправительными винтами цилиндрического уровня, пузырек приводится в нульпункт. Для контроля поверку следует повторить.
5.5. Тригонометрическое нивелирование
Тригонометрическое нивелирование широко распространено при топографической съемке местности, а также при производстве инженерно-геодезических работ. В настоящее время в связи с внедрением тахеометров-автоматов сфера применения тригонометрического нивелирования стала значительно шире. Основным преимуществом данного вида нивелирования является возможность определения высот точек без ограничения углов наклона скатов к горизонту, а также дальности расстояний до точек наблюдений.
Для
определения превышения/г
теодолитом-тахеометром измеряется
угол наклона визирной линии к горизонту
н при наведении
на верх рейки, вехи или на любую высоту
визирования
— V,
измеряют
высоту инструмента — г
(рис. 44 а). Если
определить
расстояние D
между
точками, можно составить равенство:
![]()
Для упрощения расчетов при измерениях визируют на высоту инструмента, отмеченную на рейке (рис. 44 б). Тогда формула вычисления превышения имеет вид:
Дирекционный
угол исходной стороны хода а\.2
определяется
путем привязки к государственной
геодезической сети.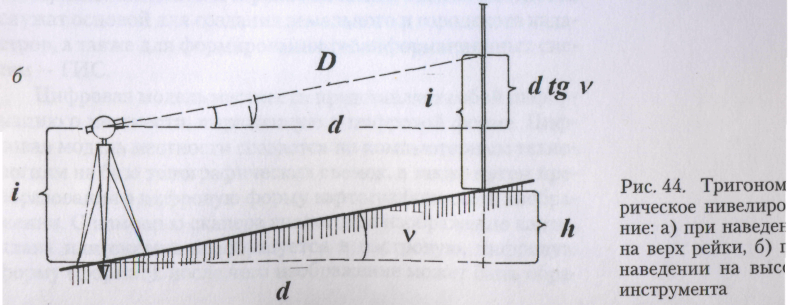
Вычисление
координат точек теодолитного хода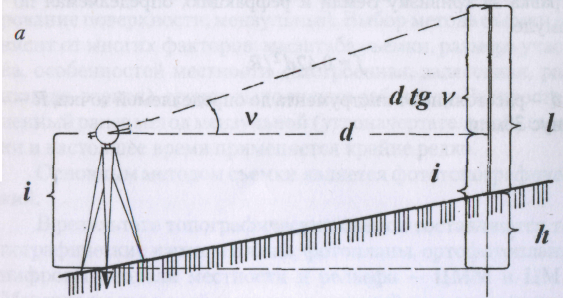
Исходными данными для вычисления координат точек теодолитного хода являются:
координаты точки 1 — х\, г/1 (например, пункта поли- гонометрии);
горизонтальные проложения сторон хода;
горизонтальные углы;
— дирекционный угол исходной стороны — а^2-
Координаты точек хода 2,3,4 определяются путем решения прямой геодезической задачи (гл.1). Ниже рассматривается поэтапное выполнение расчетов.
Увязка углов хода. Теоретическая сумма углов замкнутого многоугольника Σßтеор равна 180°(и-2), где п — числo углов многоугольника.
Сумма измеренных углов отличается от теоретической на величину невязки:
![]()
Угловая невязка хода не должна превышать допустимой величины, определяемой по формуле:
![]()
где n — число измеренных углов.
Если угловая невязка превышает допустимую величину, измерения углов следует повторить.
Угловая невязка распределяется с обратным знаком на все измеренные углы поровну так, чтобы сумма исправленных углов была равна теоретической.
Вычисление дирекционных углов сторон хода. Дирек-ционный угол исходной стороны, как отмечалось ранее, должен быть известен. Дирекционные углы остальных сторон хода вычисляются по исправленным горизонтальным углам р. Дирекционный угол каждой последующей стороны хода равен дирекционному углу предыдущей стороны плюс 180° и минус горизонтальный угол справа по ходу. Как следует из рис. 46:
![]()
В общем виде выражение имеет вид:
![]()
где а„ — дирекционный угол последующей стороны, а„_! — ди-рекционный угол предыдущей стороны, р„ — исправленный горизонтальный угол между сторонами, справа по ходу
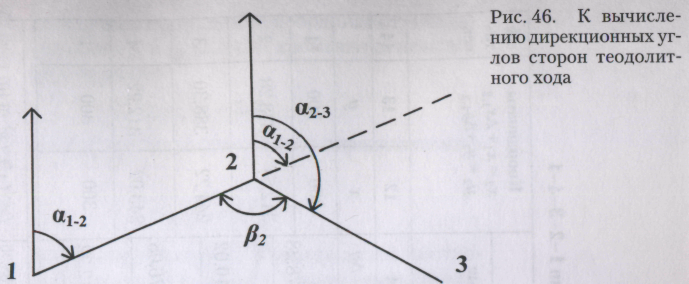
Контролем вычисления дирекционных углов сторон замкнутого хода служит получение в конце расчетов дирекци-онного угла исходной стороны.
Вычисление румбов сторон хода. Румбы сторон хода вычисляются для удобства последующих расчетов при использовании таблиц. Если расчеты ведутся на калькуляторе, перевод дирекционных углов в румбы можно не выполнять.
Вычисление и увязка приращений координат. Как отмечалось ранее (гл. 1), при решении прямой геодезической задачи приращения координат Дх и Ау точек теодолитного хода вычисляются по формулам:
![]()
d — горизонтальное проложение стороны хода, r — румб этой стороны. Знаки приращений координат зависят от направления стороны хода и приведены в табл. 13.
Приращения координат вычисляются с помощью калькулятора или по таблицам приращений координат.
Сумма
приращений координат в замкнутом
теодолитном ходе
теоретически равна нулю. Вследствие
ошибок изм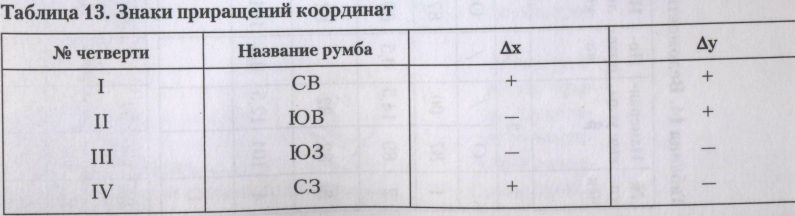
где hсеч — высота сечения рельефа, а -заложени