

Моделирование системы синхронизации
(практическое занятие 5)
Цель работы:
1) знакомство с функциональными элементами САУ радиотехнического назначения - системы фазовой автоподстройки частоты;
2) приобретение навыков в моделировании нелинейной САУ радиотехнического назначения.
6.1. Моделирование элементов функциональной схемы (2 часа)
В работе исследуются точностные и динамические характеристики нелинейной системы фазовой автоподстройки частоты, функциональная схема которой содержит фазовый детектор (дискриминатор), корректирующую цепь (не обязательно), усилитель, управляемый генератор.
Часть 1. Фазовый дискриминатор, описание схемы моделирования
Работа фазового дискриминатора данной системы основана на известном тригонометрическом соотношении:
2sin(t) sin(t+)=cos - cos(2t+) ,
в котором первое слагаемое формирует дискриминационную характеристику, а второе - отфильтровывается.
Схема моделирования приведена на рис.6. Элементами схемы являются: генераторы синусоидального напряжения «VSIN» из библиотеки «Source.slb», перемножитель «EMULT» из библиотеки «Abm.slb». В схеме также используются элементы C и R из библиотеки «Analog.slb», аналоговая земля «AGND» и выводы «Bubble» из библиотеки «Port.slb». Для генераторов синусоидального напряжения «VSIN» необходимо задать следующие параметры (атрибуты): DC=1, AC=1 (используются при расчете схемы по постоянному и переменному току), VOFF=0 (постоянная составляющая напряжения), VAMPL=1 или 2 (амплитуда), FREQ=1meg (частота), TD=0 (задержка), DF=0 (коэффициент затухания), PHASE[град] = (начальная фаза).
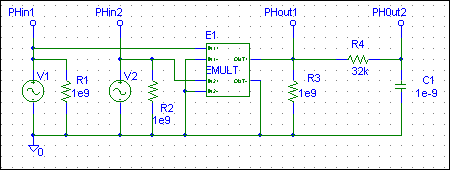
Рис.6
RC-цепь должна отфильтровывать 2-ю гармонику (RC>>0,5мкс) и не должна ухудшать динамические характеристики САУ (1/RC>>СР=KV). Можно выбрать C=1000пф, R=32к (RC=32мкс).
Моделирование фазового дискриминатора
В режиме «Transient» снять осциллограммы напряжений для нескольких значений и построить дискриминационную характеристику (зависимость V(PHout2) от ). При установке интервала временной дискретизации учесть значение частоты входного сигнала. При установке времени моделирования учесть постоянную времени RC-цепи.
Часть 2. Управляемый генератор, описание схемы моделирования
Схема моделирования управляемого генератора (рис.7) содержит генератор гармонического сигнала и схему управления фазой этого генератора.
Схема управления фазой состоит из источника управляющего напряжения типа «VPWL» (из библиотеки «Source.slb», в качестве входного сигнала можно задать единичную «ступеньку») и управляемого напряжением источника тока «GVALUE» (из библиотеки «Abm.slb»), заряжающего емкость. Генератор гармонического сигнала выполнен на функциональном преобразователе «EVALUE» (из библиотеки «Abm.slb»).
При задании параметров (атрибутов) «EVALUE» в строке «Expr» записать
sin(6.28*(1meg*TIME+V(UG1out1))),
где TIME - текущее время моделирования, V(UG1out1) - управляемая фаза.
При желании можно добавить к схеме компонент «Param» из библиотеки «Special.slb» и задать число Pi=3,1415926535898, идентификатор которого заменит число 6,28 в строке «Expr» (с коэффициентом 2). Этот параметр пригодится в дальнейшем для задания начальной фазы сигнала.
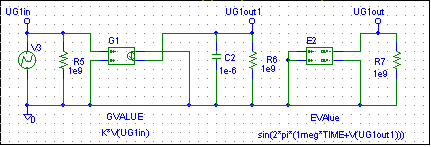
Рис.7
Для того, чтобы V(UG1in) и V(UG1out1) были связаны через интегратор (управляющее напряжение и частота генератора связаны линейной зависимостью), используется источник тока, заряжающий емкость С.
При задании параметров (атрибутов) «GVALUE» записать К1(число)*V(UG1in). Положить С=1мкф, тогда коэффициент управления частотой К1 имеет размерность мГц/в.
Например, при К1=0,4 и V(UG1in)=1в частота генератора равна 1,4мГц.
Для реактивных элементов схемы указать начальные установки (IС).