

5. Решение систем дифференциальных уравнений
(практическое занятие 4)
Цель работы:
1) описание систем в пространстве состояний;
2) численное решение систем дифференциальных уравнений;
3) анализ точности САУ.
5.1. Описание схемы моделирования
Часть 1. Описание САУ в пространстве состояний
Продолжается исследование САУ, структура и параметры которой определены в задании 1 (переходные процессы системы известны).
Составить структурную схему САУ, содержащую только интегрирующие и безынерционные звенья. С помощью структурной схемы описать САУ в пространстве состояний. Описание должно включать в себя уравнения состояния и наблюдения. Рекомендуется обеспечить совпадение одной из компонент вектора состояния САУ с ее выходным сигналом.
Часть 2. Моделирование САУ
Схема моделирования приведена на рис.5. В схему включены новые компоненты: функциональный преобразователь «EVALUE» и интегратор «INTEG» из библиотеки «Abm.slb». В атрибутах «EVALUE» в разделе «Expr» следует указать функциональную зависимость соответствующей производной от переменных состояния системы V(out1), V(out2) и входного воздействия (единичного: g(t)=1). В атрибутах «INTEG» в разделе «IC» следует указать начальные условия (нулевые).
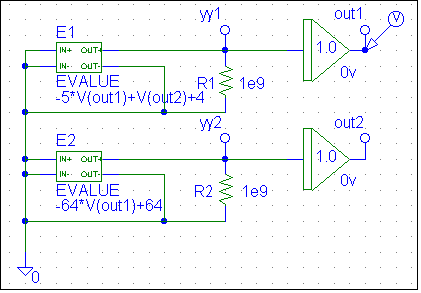
Рис.5
5.2. Задание по работе
1. В режиме «Transient» выполнить моделирование САУ с построением переходных процессов (3 варианта). Убедиться в совпадении результатов с теми, которые были получены при выполнении Заданий 1 и 2.
2. Оценить ошибку системы в установившемся режиме (на график вывести функцию 1 - V(out1).
3. Записать функциональные зависимости «EVALUE» так, чтобы входное воздействие изменялось во времени по линейному закону: g(t)=V*TIME, где V - число, TIME - текущее время моделирования. Значение скорости V рассчитать, исходя из заданного коэффициента усиления системы KV и допустимой динамической ошибки eД = 0,1 [в].
4. В режиме «Transient» выполнить моделирование САР и оценить установившуюся ошибку системы (на график вывести функцию V*TIME - V(out1).
5.3. Содержание отчета
Задание, передаточная функция САУ, структурная схема и описание в пространстве состояний.
Схема моделирования, списки соединений, директивы моделирования.
Результаты моделирования САУ при постоянном воздействии (3 переходных процесса и значение ошибки в установившемся режиме).
Расчет точности САУ при линейном воздействии и результаты соответствующего моделирования.
Заключение, содержащее постановку задач исследования, методику их проведения и основные выводы.
5.4. Контрольные вопросы
1. К каким последствиям приводит не выполнение рекомендации относительно обеспечения совпадения одной из компонент вектора состояния САУ с ее выходным сигналом?
2. Перечислить преимущества метода описания систем в пространстве состояний в сравнении с другими методами (скалярное дифференциальное уравнение, передаточная функция).
3. Как записывается характеристическое уравнение системы, представленной в пространстве состояний?
4. Какой порядок астатизма имеет моделируемая система?
5. Как определить порядок астатизма системы, представленной в пространстве состояний?
6. Указать 2 способа определения передаточной функции системы, представленной в пространстве состояний.
7. Дать рекомендации относительно выбора интервала временной дискретизации при численном решении систем дифференциальных уравнений.