

ОГЛАВЛЕНИЕ
|
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Общие положения по функционированию станционных систем автоматики и телемеханики . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1. Структура систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2. Классификация систем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3. Зависимости и замыкания, выполняемые в системах . . . . . . . . . . . 2. Основы релейных централизаций . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1. Реализация функциональной структуры . . . . . . . . . . . . . . . . . . . . . . 2.2. Виды релейных централизаций и область их применения . . . . . . . 3. Релейные централизации с несекционированным построением маршрутных замыканий . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1. Особенности схемных решений . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2. Схемы управления светофорами . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3. Схема замыкания и размыкания маршрутов . . . . . . . . . . . . . . . . . . 4. Релейные централизации с секционированным построением маршрутных замыканий . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1. Особенности схемных и конструктивных решений . . . . . . . . . . . . 4.2. Схемы начальных и конечных маневровых реле . . . . . . . . . . . . . . . 4.3. Схема контрольно-секционных реле . . . . . . . . . . . . . . . . . . . . . . . . . 4.4. Схема сигнальных реле . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5. Схема маршрутных реле . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.6. Схема замыкающих реле . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.7. Схема реле разделки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Маршрутный набор . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1. Особенности конструктивных и схемных решений . . . . . . . . . . . . 5.2. Структура взаимодействия реле маршрутного набора . . . . . . . . . . 6. Процессорные системы электрических централизаций . . . . . . . . . . . . . 6.1. Предпосылки развития процессорных систем . . . . . . . . . . . . . . . . . 6.2. Релейно-процессорные централизации . . . . . . . . . . . . . . . . . . . . . . . 6.2.1. Общая характеристика . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.2.2. Техническая структура ЭЦ-МПК . . . . . . . . . . . . . . . . . . . . . . . . . . 6.2.3. Функции автоматизированных рабочих мест . . . . . . . . . . . . . . . . 6.2.4. Управление и отображение информации . . . . . . . . . . . . . . . . . . . 6.2.5. Увязка КТС-УК с исполнительной группой реле ЭЦ . . . . . . . . . 6.3. Микропроцессорные централизации . . . . . . . . . . . . . . . . . . . . . . . . 6.3.1. Общая характеристика . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.3.2. Техническая структура МПЦ Ebilock-950 и функции ее составляющих . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.3.3. Программное обеспечение и безопасное функционирование . . . . . . . . 6.3.4. Увязка объектных контроллеров с объектами управления и контроля . . . Библиографический список . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6
8 8 10 12 14 14 19
22 22 24 26
28 28 31 32 33 35 36 37 38 38 40 43 43 44 44 45 46 47 48 49 49
49 52 52 54
|
ВВЕДЕНИЕ
Железнодорожные станции относятся к раздельным пунктам, имеющим путевое развитие и устройства, которые позволяют осуществлять прием, отправление, обгон и скрещение поездов, а также производить грузовые операции, обслуживание пассажиров, формирование и расформирование поездов, их технический осмотр, смену локомотивов и ремонт подвижного состава. В зависимости от основного назначения станции подразделяются на промежуточные, участковые, сортировочные, пассажирские и грузовые.
Наличие в эксплуатационной работе станции множества передвижений требует установки соответствующих маршрутов, т. е. путей следования с использованием стрелок, различного рода путевых участков, тупиков и т. п. Различают маршруты приема, отправления, сквозного пропуска по станции, передачи состава из парка в парк, маневровые и т. д. Всякая установка маршрута начинается с перевода стрелок в надлежащее положение, проверки свободности путевых участков и подачи машинисту соответствующего сигнала на движение. Установка маршрутов безопасным способом и возможность их одновременного существования обеспечиваются станционными устройствами автоматики и телемеханики, а объектами управления и контроля в них являются стрелки, сигналы и путевые участки.
Первые станционные системы, появившиеся в России в конце ХIХ – начале ХХ в., предусматривали ручной перевод стрелок по маршруту с последовательным их обходом, а в качестве сигналов использовали семафоры. Взаимная блокировка между стрелками и сигналами достигалась механическими средствами (применением различного рода замычек, запорных планок, напольных и аппаратных замков). Часть технических средств размещалась на стрелочном посту в специальных аппаратах, получивших название маршрутно-контрольных устройств (МКУ). Поскольку на приготовление маршрута тратилось значительное время, то МКУ обеспечивали низкую пропускную способность станции.
В этом отношении более совершенной явилась механическая централизация (МЦ). В ней управление стрелками и семафорами осуществлялось посредством рычагов, сосредоточенных на посту МЦ. Рычаги с помощью гибких тяг, уложенных в специальные желоба, увязывались с приводозамыкателями стрелок и семафоров. Таким образом, при приготовлении маршрута не требовался пеший обход стрелок, время на приготовление маршрута сократилось, увеличилась пропускная способность станций. Однако в системе не исключался ручной труд, от сигналиста требовались большие усилия при переводе стрелок, радиус действия постов был ограничен и аппаратура управления была громоздкой.
Начиная с середины 30-х гг. ХХ в. на отечественных железных дорогах внедряются новые виды централизаций стрелок и сигналов с использованием стрелочных электроприводов и светофорной сигнализации, исключающие ручной труд. К таковым относятся механико-электрическая, электрозащелочная и релейная централизации. Их названия отражают способ взаимоблокировки между стрелками и сигналами. Во второй половине ХХ в. релейная централизация под названием электрическая (ЭЦ) широко применяется на железных дорогах СССР. Значительные изменения претерпевают устройства механизации и автоматизации сортировочных горок. Внедрение ЭЦ позволило ликвидировать штат стрелочников, а замена ручного торможения отцепов автоматическим с использованием вагонных замедлителей – избавиться от непроизводительного труда башмачников.
В результате появления новых объектов управления и расширения функций релейная централизация неоднократно модернизировалась и в конечном итоге исчерпала свои возможности. Поэтому в настоящее время в области развития ЭЦ основной задачей считается переход на новую элементную базу с использованием микропроцессоров и вычислительной техники. Пока наблюдаются только первые шаги по внедрению новых систем ЭЦ: релейно-процессорной (РПЦ) и микропроцессорной (МПЦ), которые могут стать доминирующими на железных дорогах России.
В настоящем издании (третьей части конспекта лекций по системам железнодорожной автоматики и телемеханики) главное внимание уделяется ЭЦ как основной на современном этапе развития станционных систем автоматики и телемеханики.
1. Общие положения по функционированию станционных систем автоматики и телемеханики
1.1. Структура систем
Любую станционную систему автоматики и телемеханики составляет совокупность аппаратов управления и контроля, постового и напольного оборудования, механизмов, источников энергии, линий связи и объектов, взаимодействующих между собой и обеспечивающих организацию и безопасность движения поездов в пределах станции. Общая структура такой системы представлена на рис. 1.1.
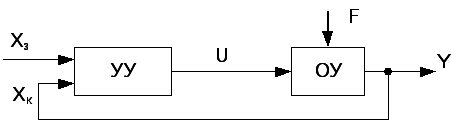
Рис. 1.1. Общая структура автоматической системы
Снимаемый с аппарата управления задающий сигнал Хз и поступающие от напольных объектов контрольные сигналы Хк подаются на вход устройства управления УУ. В последнем по заданному алгоритму происходит их обработка и формирование управляющего воздействия U, которое обеспечивает требуемый режим работы объектов управления ОУ. Как правило, на объекты влияют различного рода внешние условия (погода, обслуживающий персонал и т. п.), что учитывается возмущающим воздействием F. Таким образом, выходная координата системы описывается следующим выражением:
Y = f (Xз, Xк, F)(1.1)
В то же время Y определяется выходными координатами Y1,Y2,Y3,…,Yn соответствующих категорий объектов управления (стрелок, светофоров и т.д.) и является дискретной векторной величиной:
Y = {Y1, Y2, Y3, … Yn}(1.2)
В свою очередь
Yi = {y1, y2, y3, … yn}, (1.3)
где уn – выходная координата n-го объекта в i-ой категории.
В состав устройства управления входят контрольные элементы КЭ, фиксирующие состояние напольных объектов; функциональная структура ФС, реализующая алгоритм управления; исполнительные элементы ИЭ, вырабатывающие управляющие воздействия в необходимой форме, и индикаторные элементы ИНЭ, отображающие на аппарате состояние контролируемых объектов (рис. 1.2).
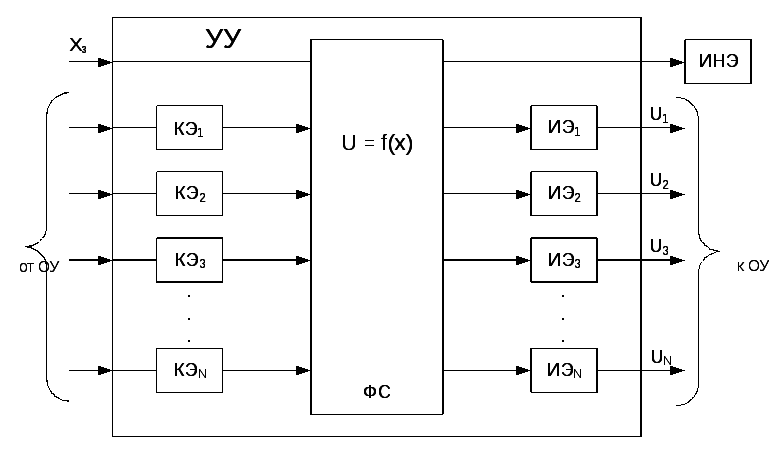
Рис. 1.2. Общая структура устройств управления
Задача функциональной структуры сводится к решению уравнения
U = f (Xз, Xк) , (1.4)
в котором задающие ХЗ и контрольные ХК воздействия, заданные дискретными векторными величинами, могут быть определены аналогично выходной координате на множестве элементов данной категории объектов. Решение этого уравнения осуществляется по алгоритму Aj = (U, X, F) в соответствии с показателем качества I (Aj) = I (U, F, X).
1.2. Классификация систем
Частные решения по синтезу станционных систем автоматики и телемеханики позволяют все их многообразие выделить в три большие группы: нецентрализованные системы управления стрелками и сигналами, системы централизации стрелок и сигналов, системы механизации и автоматизации сортировочных станций.
В нецентрализованных системах средства управления и контроля рассредоточены в пределах станции. К таковым относятся ключевые зависимости стрелок и сигналов, которые в свое время были широко представлены на железных дорогах России. Возникнув в начале ХХ в., они просуществовали десятки лет, отличались надежностью, простотой в управлении и обслуживании, но использовали ручной труд в переводе стрелок и открытии сигналов, сдерживали рост пропускной способности станций. В настоящее время ключевые зависимости встречаются на дорогах крайне редко и подлежат замене на современные устройства.
В централизованных системах средства управления и контроля сосредоточены в одном месте станции – на посту централизации. В общем виде системы централизации подразделяются на механические и силовые. В механической централизации рычаги аппарата управления связываются со стрелочными и сигнальными приводами посредством гибкой передачи (проволоки, троса). Для воздействия на объекты управления используется мускульная энергия человека, переводящего рычаг. В настоящее время МЦ себя изжила.
В силовых централизациях для изменения положения стрелки или состояния сигнала используется какой-либо вспомогательный вид энергии. В этой категории доминирующее положение занимает электрическая централизация, в которой принципы действия средств управления и контроля построены на использовании электрического тока. Поскольку в названных средствах в качестве элементной базы применяются реле, они получили еще одно название – релейные. В релейных централизациях различают системы с прямым и дистанционным управлением объектами. В последнем виде (его еще называют телеуправлением) значительное место занимают диспетчерские централизации (ДЦ), в которых управление стрелками и сигналами на станциях целого направления осуществляет поездной диспетчер. За время существования систем ЭЦ и ДЦ их функции и состав объектов управления настолько расширились, что использование реле для их построения стало бесперспективным, поэтому в настоящее время наметился переход на внедрение в производство микропроцессорных систем (МПЦ и ДЦМ).
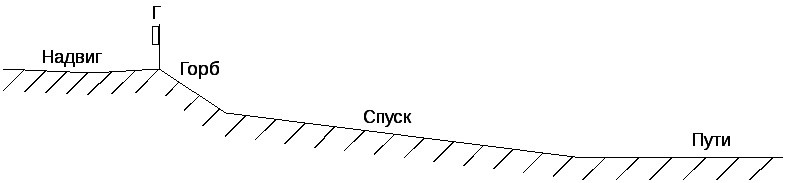
Горочные устройства автоматики и телемеханики применяются на сортировочных станциях, на которых осуществляется расформирование вагонов и формирование из них поездов, следующих на большие расстояния без переработки. Важнейшим элементом такой системы является горка. Примерный путевой план и профиль сортировочной горки представлены на рис.1.3.
Из парка приема состав, подлежащий роспуску, подается на горб горки, где происходит расцепка его на отдельные группы вагонов (отцепы) и толкание последних со скоростью, которая диктуется сигнальными показаниями горочного светофора Г. Скатываясь по спускной части горки, отцепы достигают путей сортировочного парка, где накапливаются по назначению.
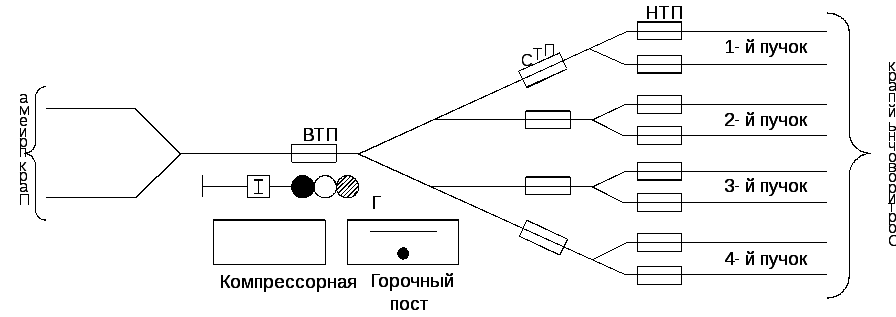
а)
б)
Рис. 1.3. План сортировочной горки:
а – путевой план; б – профиль
Выбор сортировочного пути определяется маршрутным заданием, которое вводится в систему оператором с аппарата управления. В соответствии с ним системой горочной автоматической централизации (ГАЦ) стрелки спускной части горки устанавливаются в нужное положение. С целью увеличения пропускной способности горки их перевод осуществляется последовательно по мере подхода к ним очередного отцепа.
Вычисление скорости толкания отцепов и выдача соответствующих приказов на включение сигнальных огней горочного светофора и маршрутных указателей осуществляется системой автоматического задания скорости роспуска (АЗСР). Поскольку вагоны имеют различные ходовые свойства, то для получения между отцепами интервала, обеспечивающего перевод стрелки и исключающего нагон одного отцепа другим, применяют устройства автоматического регулирования скорости скатывания (АРС), управляющие вагонными замедлителями. Большинство современных замедлителей используют энергию сжатого воздуха, вырабатываемого компрессором, и поступающего по напорной магистрали. В общем случае вагонные замедлители располагаются на трех тормозных позициях: верхней ВТП (между горбом горки и головной стрелкой), средней СТП (перед пучковыми стрелками) и нижней НТП (в начале путей сортировочного парка). Для горок повышенной производительности на сортировочных путях может быть предусмотрена еще одна тормозная позиция. Количество тормозных средств и места их расположения определяются расчетом.
Все используемые системы механизации и автоматизации сортировочных горок могут функционировать самостоятельно или в комплексе, а также могут быть дополнены горочным программно-задающим устройством (ГПЗУ) и телеуправляемым горочным локомотивом (ТГЛ). В настоящее время в производство внедряется комплексная система с использованием микропроцессоров – КГМ.