

Расчет сопротивлений для роторной цепи ад.
Условия расчета пусковых сопротивлений для АД с фазным ротором аналогично условиям расчета пусковых сопротивлений ДНВ.
В зависимости от требуемой точности и имеющихся данных двигателя расчет можно произвести точным или приближенным методом.
Для расчета задаются пиковым и переключающим моментом. Максимальный пусковой момент М1 желательно принимать не0,85 от МКР, соответствующего SКР. Величина переключающего момента М2 связывается с числом ступеней пускового реостата, так же как и для двигателя постоянного тока.
При
приближенном методе расчета механическая
характеристика двигателя считается
линейной. Его применяют при броске
момента М1,
не превышающем 0,7 Мкр. Задаются колебания
моментов М1
и М2
и строится пусковая диаграмма, где
сначала проводится самая нижняя
характеристика (начальная пусковая
характеристика, а затем и остальные
характеристики до выхода на естественную
в точке «b»
(см. диаграмму). Затем определяют
номинальное сопротивление ротора
![]() ,
где
,
где
Е2Н – номинальная ЭДС ротора при неподвижном роторе (напряжение между кольцами неподвижного ротора). Номинальное сопротивление r2Н - это сопротивление одной фазы роторной цепи при неподвижном роторе, когда по нему проходит номинальный ток I2Н.
Так
как скольжение АД при определенном токе
и моменте пропорционально сопротивлению
роторной цепи, что видно из выражения
![]() ,
,
то имея ввиду, что при неподвижном роторе S=1, а при номинальном режиме S=SН, можно написать r2/r2Н=SН/1, отсюда r2=r2НSН или в относительных единицах ρ2=SН.
П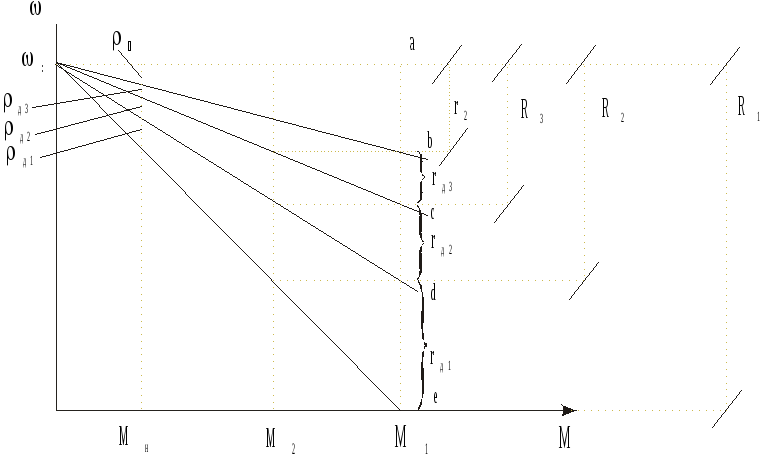 олученное
выражение показывает, что сопротивление
на любой характеристике можно найти
умножением скольжения на этой
характеристике наr2Н.
Отсчитывая при МН
скольжения между смежными характеристиками,
получим доли сопротивления ρД
и ρД2
и т.д., по которым умножением на r2Н
находятся абсолютные величины
сопротивления ступеней. Отсчитывая же
полные скольжения при МН
для искусственных характеристик, получим
соответствующие полные сопротивления
R1,
R2…,
т.е.
олученное
выражение показывает, что сопротивление
на любой характеристике можно найти
умножением скольжения на этой
характеристике наr2Н.
Отсчитывая при МН
скольжения между смежными характеристиками,
получим доли сопротивления ρД
и ρД2
и т.д., по которым умножением на r2Н
находятся абсолютные величины
сопротивления ступеней. Отсчитывая же
полные скольжения при МН
для искусственных характеристик, получим
соответствующие полные сопротивления
R1,
R2…,
т.е.
![]()
![]()
![]() и
и
![]()
![]()
![]()
и т.д.
Рассмотрим аналитический метод в предположении линейности механической характеристики. Заданными могут быть пики моментов М1 и М2 или число ступеней «m».
Если требуется определить «m», то в зависимости от требуемого режима электропривода задаются значениями М1 и М2 и определяется величина «m» (в относительных единицах)

Если «m» получается не целым, нужно изменить µ1 или µ2. После этого определяется
=μ1/μ2,
а затем сопротивления. Применительно к изображенной пусковой диаграмме
![]()
![]()
![]()
Сопротивления для каждой ступени пускового реостата определяются путем последовательного вычитания сопротивлений на смежных ступенях.
![]()
![]()
![]()
Приведенная
выше формула

для АД отличается от аналогичной формулы для ДНВ тем, что в ней вместо относительного сопротивления якоря ρЯ стоит скольжение SН. Это вытекает из того положения, что при номинальном моменте скольжения равны долям внутреннего сопротивления ротора.
Если
число ступеней m
задано и
режим пуска форсированный (ускоренный),
задаются пиковым моментом μ1
и определяется величина
![]()
После
этого проверяется величина μ2,
которая долна быть больше момента
статического сопротивления, т.е.
![]()
Сопротивления ступеней определяются по приведенным выше формулам.
Если
число ступеней «m»
задано и режим пуска нормальный, задаются
переключающим моментом μ2,
на 10-20% превышающим μС
и находится λ
![]()
Затем делается проверка моментов. Величина μ1=λμ2 должна быть < μДОП. Сопротивление ступеней определяются аналогично предыдущему.
П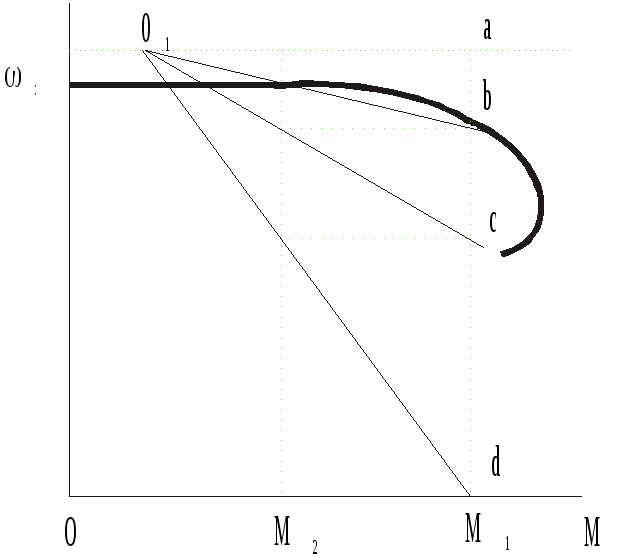 ри
учете криволинейности механических
характеристик рассчитывается и строится
естественная механическая характеристика.
Задаются значениями М1
и М2.
Через точки пересечений вертикалей,
соответствующих М1
и М2
с естественной характеристикой проводится
луч до пересечения с горизонтальной
линией, соответствующей ω=ω0
(S=0)
в т.0’.
ри
учете криволинейности механических
характеристик рассчитывается и строится
естественная механическая характеристика.
Задаются значениями М1
и М2.
Через точки пересечений вертикалей,
соответствующих М1
и М2
с естественной характеристикой проводится
луч до пересечения с горизонтальной
линией, соответствующей ω=ω0
(S=0)
в т.0’.
Далее строятся лучи с соблюдением равенства пиковых и перекл-х моментов на всех ступенях. Если пики получаются не одинаковыми, следует изменить М1 и М2 и снова построить лучи. По построенным лучам определяется сопротивления цепи ротора.
![]()
![]()
Сопротивления ступеней
![]()
![]()