

ДЕТАЛИ МАШИН
.pdfПередаточное отношение в этом случае будет равно:
i |
|
1 |
|
d 2 |
. |
(4.3.125) |
|||
|
|
||||||||
12 |
|
|
|
d |
1 |
|
|||
|
2 |
|
|
|
|
||||
Передаточное число u определяется как: |
|
||||||||
u |
d 2 |
. |
|
|
|
(4.3.126) |
|||
|
|
|
|
||||||
|
|
d 1 |
|
|
|
|
|
||
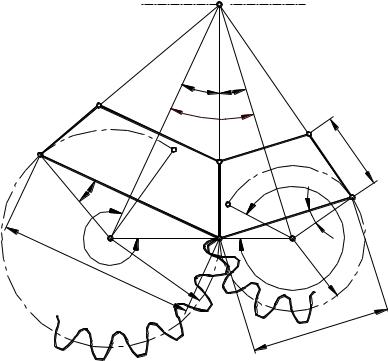
Из рис. 4.3.37 очевидно, что:
R |
d 1 |
|
|
d 2 |
. |
(4.3.127) |
|
2sin |
|
|
|||||
e |
|
2sin |
2 |
|
|
||
|
1 |
|
|
|
|
|
|
Расстояние Re |
называется внешним конусным расстоянием. |
||||||
he2  hfe2
hfe2
hae2



 2
2 


d |
|
d |
|
a |
|
|
2 |
|
|
2 |
|
b
0,5b

 O2
O2
 O2cp
O2cp
 O2ý
O2ý
2 |
|
|
f2 |
a |
|
|
|
|
a2 |
|
f2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
|
P |
|
O |
|
1 |
|
Pcp |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
ý |
a1 |
|
|
|
|
|
O |
1cp |
Pcp |
O1ý |
||
|
|
|
|
|
|
|
|
||||
|
f1 |
|
|
|
|
|
|
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
1 |
|
||
|
|
|
|
|
|
|
d |
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
h |
|
|
ae |
|
|
h |
2 |
|
fe |
|
|
|
h |
|
|
e2 |
|
|
Re |
|
|
Рис. 4.3.37 |
|
Запишем формулу (4.3.126) с учетом (4.3.127) в виде: |
|
|
u sin 2 . |
|
(4.3.128) |
sin 1 |
|
|
252
Так как начальные конусы перекатываются друг по другу по обшей образующей OP и имеют общую вершину O, находящуюся в точке пе-
ресечения осей колес (рис. 4.3.33, 4.4.45), то получаем: |
|
||||
1 2. |
(4.3.129) |
||||
Из формулы (4.3.128) с учетом (4.3.129) получаем: |
|
||||
tg |
|
sin |
, |
|
(4.3.130) |
|
|
||||
1 |
u cos |
|
|||
tg 2 |
|
usin |
. |
(4.3.131) |
|
|
|
||||
|
1 ucos |
|
|||
В подавляющем большинстве случаев межосевой угол передачи равен 90°. Такие передачи называют ортогональными коническими передачами.
Для этого случая формула (4.3.128)–(4.3.131) принимает вид:
|
sin 90 1 |
|
cos |
|
|
||||||
u |
|
|
|
|
|
|
|
1 |
ctg |
, |
(4.3.132) |
|
|
|
|
|
|
|
|||||
|
|
|
|
sin 1 |
|
1 |
|
|
|||
|
|
|
|
|
sin 1 |
|
|
||||
|
2 |
90 |
, |
|
|
|
|
(4.3.133) |
|||
1 |
|
|
1 |
|
|
|
|
|
|
|
|
tg |
|
, |
|
|
|
|
|
(4.3.134) |
|||
|
|
|
|
|
|
||||||
1 |
|
|
u |
|
|
|
|
|
|
||
tg 2 u.
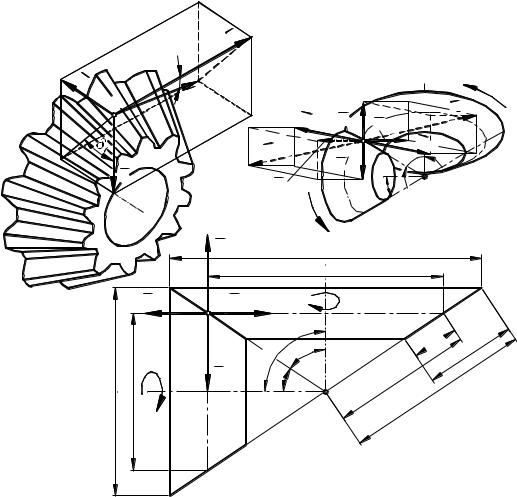
Рассмотрим построение эвольвентных зубьев на поверхностях на-
ружных дополни-
тельных конусов с вершинами O1 и O2 , оси которых совпадают с осями проектируемых колес, а образующие перпендикулярны к образующим делительных конусов. Как отмечалось выше, дополнительные конусы могут быть развернуты на плос-
(4.3.135)
C O C
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
B |
|
|
N |
|
|
|
b |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
M |
|
A |
|
|
|
|
|
|
||
|
|
|
O2 |
P |
|
|
|
|
d |
|
|
1 |
|||
|
|
|
|
O |
|
||
|
|
|
|
|
|
||
|
2 |
|
|
1 |
|||
|
r |
|
|
r |
|||
|
c2 |
|
|
|
|
||
|
|
|
|
|
c |
||
|
|
|
|
|
|
|
2 |
|
|
|
c |
|
|
|
|
|
|
|
2 |
|
c1 |
|
|
|
|
|
|
|
|
||
|
|
II |
|
|
|
I |
d |
|
|
|
|
|
|
|
1 |
|
|
|
Рис. 4.3.38 |
|
|
||
253

кость. Для этого из точек O1 и O2 проводим окружности радиусов O1P
и O2P (рис. 4.3.38).
Принимая эти окружности за начальные, строим плоское зацепление по правилам, изложенным ранее для цилиндрических прямозубых колес (см. раздел 4.3.5.2).
Построенные зубчатые секторы I и II сворачиваем в конуса (соединяем попарно линии NO2 с PO2 и MO1 с PO1) и соединяем их с дополнительными конусами (рис. 4.3.37).
Соединяя все точки полученных профилей с вершиной делительных конусов, получаем боковые поверхности зубьев.
Радиусы начальных окружностей секторов определяют по формулам:
r |
O P |
|
d 1 |
, |
(4.3.136) |
|
|
|
|||||
c1 |
1 |
2cos |
|
|||
|
|
1 |
|
|
|
|
r |
O P |
|
d 2 |
. |
(4.3.137) |
|
|
|
|||||
c2 |
2 |
|
2cos 2 |
|
||
Центральные углы зубчатых секторов c1 и c2 условий:
MAP r c1 c1 d 1,
NBP r c2 c2 d 2,
откуда с учетом формул (4.3.136) и (4.3.137):
c1 d 1 2 cos 1, r c1
c2 d 2 2 cos 2 . r c2
можно получить из
(4.3.138)
(4.3.139)
(4.3.140)
(4.3.141)
Высоты головок и ножек задают на образующих O1P и O2P дополнительных конусов, перпендикулярных к общей образующей OP начальных конусов.
Из рис. 4.3.37 очевидно, что углы головок a и ножек f зубьев оп-
ределяются равенствами:
tg a |
|
|
hae |
|
, |
(4.3.142) |
|||
|
|
|
|
||||||
OP |
|||||||||
|
|
|
|
|
|||||
tg f |
|
|
hfe |
|
. |
(4.3.143) |
|||
|
|
|
|
||||||
|
|||||||||
|
|
|
OP |
|
|
|
|||
Так как внешнее конусное расстояние (длина образующей начальных конусов) равно:
254

|
R |
r 1 |
|
r 2 |
|
|
d 1 |
|
OP |
||||||||
sin |
sin |
|
2sin |
|||||
|
e |
|
2 |
|
||||
|
|
1 |
|
|
|
1 |
и
d 1 mez1, d 2 mez2 ,
то расчетные формулы имеют вид:
tg a1 hae sin 1 , mez1
tg a2 |
|
hae sin 2 |
|
|
||||
|
mez2 |
|||||||
|
|
|
|
|||||
tg f1 |
|
hfe sin 1 |
, |
|||||
|
|
|||||||
|
|
|
|
mez1 |
||||
tg f 2 |
|
hfe sin 2 |
|
|||||
mez2 |
||||||||
|
|
|
|
|||||
|
d 2 |
, |
(4.3.144) |
|
2sin 2
(4.3.145)
(4.3.146)
(4.3.147)
(4.3.148)
(4.3.149)
(4.3.150)
Проекции начальных конусов на плоскость их осей представляют треугольники AOP и BOP (рис. 4.3.38). Линия O1O2, перпендикулярная общей образующей начальных конусов OP, является образующей дополнительных конусов (отрезок O1P является образующей дополнительного конуса колеса 1, отрезок O2P является образующей дополнительного конуса колеса 2).
Точки O1 и O2 представляют собой вершины дополнительных конусов. Образующие O1P и O2P представляют собой радиусы начальных окружностей r 1э и r 2э приведенных (эквивалентных) цилиндрических колес, на которых строят профили зубьев (рис. 4.3.38, 4.4.45).
Очевидно, что:
r |
|
|
r 1 |
, |
(4.3.151) |
|
|
|
|||||
1э |
|
cos |
|
|||
|
|
1 |
|
|
|
|
r |
|
|
r 2 |
. |
(4.3.152) |
|
|
|
|||||
2э |
|
|
cos 2 |
можно принять за центры приведен- |
||
Следовательно, точки O1 и O2 |
||||||
ных (эквивалентных) цилиндрических колес, профили которых строят на развертках дополнительных конусов.
Так как шаг m на окружностях приведенных (эквивалентных) цилиндрических колес, описанных радиусами r 1э и r 2э , и на окружностях реальных конических колес, описанных радиусами r 1 и r 2 , одинаков, то:
255
2 r 1 z1p r 1э c1, |
(4.3.153) |
||||||
2 r 2 z2 p r 2э c2 , |
(4.3.154) |
||||||
где c1 |
и c2 – углы разверток дополнительных конусов, равные: |
||||||
|
c1 |
|
2 r 1 |
, |
(4.3.155) |
||
|
|
||||||
|
|
|
r |
|
|||
|
|
|
|
1э |
|
||
c2 |
|
2 r 2 |
(4.3.156) |
||||
r |
|
||||||
|
|
|
|
2э |
|
||
или, согласно (4.3.151), (4.3.152): |
|
||||||
c1 2 cos 1, |
(4.3.157) |
||||||
c2 |
2 cos 2 . |
(4.3.158) |
|||||
Для полных начальных окружностей приведенных (эквивалентных) колес с числом зубьев z :
2 r 1э |
|
z 1p , |
(4.3.159) |
|||||
2 r 2э z 2 p . |
(4.3.160) |
|||||||
Следовательно, согласно (4.3.151), (4.3.152): |
|
|||||||
|
z1 |
|
|
|
r 1 |
|
cos , |
(4.3.161) |
|
|
|
|
|||||
|
z 1 |
|
|
r 1э |
1 |
|
||
|
|
|
|
|
||||
|
z2 |
|
|
|
r 2 |
cos 2 , |
(4.3.162) |
|
|
z 2 |
|
r 2э |
|||||
|
|
|
|
|
|
|||
откуда приведенные (эквивалентные) числа зубьев:
z |
1 |
|
|
z1 |
, |
(4.3.163) |
|
|
|
||||||
|
|
cos |
|
||||
|
|
|
1 |
|
|
|
|
z 2 |
|
|
z2 |
. |
(4.3.164) |
||
|
|
||||||
|
|
|
|
cos 2 |
|
||
Таким образом, числа зубьев приведенных (эквивалентных) колес, всегда больше чисел зубьев соответствующих зубчатых секторов. Очевидно также, что передаточное отношение эквивалентных цилиндрических колес не равно передаточному отношению проектируемых колес.
Так как зацепление конических колес эквивалентно зацеплению цилиндрических колес с большим числом зубьев, то при равных условиях конические колеса обладают большим, чем цилиндрические, коэффициентом перекрытия и меньшим числом зубьев zmin , которое может быть выбрано без подрезания на малом колесе стандартного зацепления.
Как отмечалось выше, на практике преимущественное применение имеют конические передачи с межосевым углом передачи , равным 90° – ортогональные конические передачи.
В этом случае:
256

на основании уравнения (4.3.127): |
|
|
|
|
|
|
|
||||||||||||||||||||||
R |
|
d 1 |
|
|
|
d 2 |
|
|
ud 1 |
|
|
ud 1 |
, |
|
(4.3.165) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 1 |
|
||||||||||||||
e |
|
2sin 1 |
|
2sin 2 |
|
2sin |
|
2cos 1 |
|
|
|
|
|||||||||||||||||
где на основании уравнения (4.3.133): |
|
|
|
|
|
|
|
||||||||||||||||||||||
1 arcctgu ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.166) |
||||||||||
из рис. 4.3.37 с учетом (4.3.145) и (4.3.145): |
|
|
|
|
|||||||||||||||||||||||||
внешнее конусное расстояние: |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u2 1 |
, |
|
Re 0,5 |
|
d22 |
d21 0,5me |
|
z22 z12 |
0,5mez1 |
(4.3.167) |
||||||||||||||||||||||
диаметры окружностей вершин: |
|
|
|
|
|
|
|
||||||||||||||||||||||
da1 d 1 2hae cos 1 |
me z1 2ha* cos 1 , |
|
|
|
(4.3.168) |
||||||||||||||||||||||||
da2 d 2 |
2hae cos 2 me uz1 2ha*sin 1 , |
|
|
|
(4.3.169) |
||||||||||||||||||||||||
углы конусов вершин: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
a1 1 a1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.170) |
||||||||||
a2 2 a2 , |
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.171) |
||||||||||||||||
углы конусов впадин: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
f1 |
1 f1, |
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.172) |
|||||||||||||||
f 2 |
2 |
f 2 , |
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.173) |
||||||||||||||
углы a |
и f |
|
определяются из уравнений (4.3.85) – (4.3.88): |
||||||||||||||||||||||||||
tg a1 |
|
hae sin 1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.174) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
mez1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
tg |
a2 |
|
hae cos 1 |
, |
|
|
|
|
|
|
|
|
|
|
(4.3.175) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
um z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
e |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tg f1 |
|
hfe sin 1 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.176) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
mez1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
tg f 2 |
|
hfe cos 1 |
, |
|
|
|
|
|
|
|
|
|
|
|
(4.3.177) |
||||||||||||||
|
|
um z |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
e |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приведенные (эквивалентные) числа зубьев определяются из урав-
нений (4.3.101)–(4.3.102):
z |
1 |
|
|
z1 |
, |
(4.3.178) |
|
|
|
|
|||||
|
|
cos |
|
||||
|
|
|
1 |
|
|
|
|
z |
2 |
|
|
uz1 |
. |
(4.3.179) |
|
|
|
||||||
|
|
|
sin |
|
|||
|
|
|
1 |
|
|
|
|
257
Основные принципы проектирования конических прямозубых колес со смещением сводятся к проектированию эквивалентных цилиндрических колес со смещением, причем не рекомендуется принимать суммарные смещения инструмента значительно отличающимися от нуля. Рекомендуется проектировать равносмещенные конические переда-
чи (x1 x2 , x x1 x2 0).
В практике машиностроения широко применяют не только прямозубые конические колеса, в которых продольная ось зуба на начальном конусе прямолинейна и проходит через вершину конуса, но и колеса с косыми (тангенциальными) и круговыми зубьями.
Конические колеса с косыми зубьями (рис. 4.3.3, б) по несущей способности превосходят прямозубые и при одинаковой точности изготовления могут работать при больших окружных скоростях (до 8-12 м/с).
Конические колеса с круговыми зубьями (рис. 4.3.3, в) могут передавать большую нагрузку, чем прямозубые и косозубые конические колеса, и работать плавно и бесшумно при повышенных окружных скоростях (до 35 м/с при шлифованных зубьях).
Рассмотрение конических передач с косыми и круговыми зубьями колес выходит за пределы данного курса. Материал по их расчету и проектированию можно найти в специальной литературе.
4.3.6.2.2. Прочностной расчет конических зубчатых передач
4.3.6.2.2.1. Силы, действующие в зацеплении
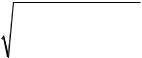
Рассмотрим схему, представленную на рис. 4.3.39.
При расчете прямозубой конической передачи считают, что равнодействующая нормальная сила Fn распределенной вдоль зуба нагрузки q приложена на середине длины зуба нормально к его боковой поверхности.
Нормальная сила Fn раскладывается на окружную силу Ft , радиальную силу Fr и осевую силу Fa :
|
F |
2T1 |
|
|
|
2T2 |
|
2T2 |
, |
(4.3.180) |
|||||||
d m1 |
|
|
|||||||||||||||
|
t |
|
|
|
|
|
d m2 |
ud m1 |
|
||||||||
|
Fa |
Ft tg sin , |
|
|
(4.3.181) |
||||||||||||
|
Fr |
Ft tg cos . |
|
|
(4.3.182) |
||||||||||||
Для ортогональной конической передачи (при 90 ): |
|
||||||||||||||||
|
|
|
t12 |
|
|
|
t21, |
|
|
(4.3.183) |
|||||||
|
F |
F |
|
|
|||||||||||||
|
|
a12 |
|
|
r21, |
|
|
(4.3.184) |
|||||||||
|
F |
F |
|
|
|||||||||||||
|
|
r12 |
|
a21. |
|
|
(4.3.185) |
||||||||||
|
F |
F |
|
|
|||||||||||||
258
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
T2 |
a |
n |
|
|
|
|
|
|
|
|
|
|
Pm |
F |
|
|
|
|
|
|
|
|
|
n21 |
|
|
|
|
|
|
Ft12 |
Fr21 |
Fa21 |
F |
||
|
|
|
|
|
12 |
|
|
Pm |
|
Ft21 |
|
|
|
|
Fn |
|
|
|
2 |
|
|||
Fr |
|
|
|
|
|
|
|
Fr12 |
|
|
|
|
|
|
Fa12 |
|
1 |
O |
|
||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
T1 |
|
|
|
|
|
|
|
Fa12 |
|
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|
|
d m2 |
|
|
|
|
|
Fa21 |
Fr12 |
|
|
|
|
|
T2 |
|
|
|
|
Pm |
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
90° |
|
|
2 |
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Fr21 |
|
1 |
|
|
|
|
m |
|
|
1m1 |
|
|
|
|
|
|
R |
|
|||
|
|
|
|
|
O |
|
|
||||
|
|
|
|
|
|
|
|
Re |
|
||
d d |
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.3.39 |
|
|
|
|||||
4.3.6.2.2.2. Расчет зубьев прямозубой конической передачипо контактной прочности |
|||||||||||
Расчет зубьев прямозубой конической передачи на контактную |
|||||||||||
прочность производят в предположении, что нагрузочная способность |
|||||||||||
конической передачи равна нагрузочной способности эквивалентной ей |
|||||||||||
цилиндрической прямозубой передачи при одинаковой длине зубьев. В |
|||||||||||
этом случае конические колеса заменяют эквивалентными цилиндриче- |
|||||||||||
скими колесами, модуль m |
которых принимают равным модулю mm |
||||||||||
конических колес в среднем сечении зуба (рис. 4.3.37, 4.3.38). |
|||||||||||
Однако опыт эксплуатации показывает, что при одинаковой на- |
|||||||||||
грузке конические передачи выходят из строя быстрее цилиндрических. |
|||||||||||
Это объясняется большим влиянием на конические передачи неточно- |
|||||||||||
стей изготовления и монтажа, а также нарушением регулировки зацеп- |
|||||||||||
ления из-за увеличения зазоров в подшипниках в процессе работы. В |
|||||||||||
связи с этим принимают, что нагрузочная способность конической пе- |
|||||||||||
редачи составляет примерно 85% от нагрузочной способности эквива- |
|||||||||||
лентной ей цилиндрической передачи: |
|
|
|
|
|
|
|
||||
259
H |
|
|
Hцэ |
. |
(4.3.186) |
к |
|
||||
|
0,85 |
|
|
||
Диаметр делительной окружности эквивалентного колеса принимают равным диаметру развертки среднего дополнительного конуса:
d |
|
|
d m1 |
, |
(4.3.187) |
|
|
|
|||||
1э |
|
cos |
|
|||
|
1 |
|
|
|
||
d2э |
|
d m2 |
. |
(4.3.188) |
||
|
||||||
|
|
|
cos 2 |
|
||
Числа зубьев эквивалентных колес z 1 и z 2 определяются по формулам (4.3.178) и (4.3.179). Передаточное число эквивалентных колес равно:
u |
э |
|
z 2 |
|
z2 cos 1 |
u |
cos 1 |
, |
(4.3.189) |
||||
|
|
|
|||||||||||
|
|
z |
1 |
|
z |
cos |
2 |
|
cos |
2 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||
или, с учетом (4.3.128), получим:
|
u |
э |
|
sin 2 cos 1 |
|
|
tg 2 |
. |
|
|
(4.3.190) |
|||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
sin cos |
2 |
|
|
|
tg |
|
|
|
||||||||
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
90 : |
|||||
Для ортогональных конических передач, когда |
|
2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|||
u |
э |
|
tg2 |
2 |
|
|
|
u2 . |
|
|
(4.3.191) |
|||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
tg2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Из рис. 4.3.39 получаем: |
|
|
|
|||||||||||||||||
d m1 2Rm sin 1. |
|
|
|
|
|
|
(4.3.192) |
|||||||||||||
Учитывая |
|
формулы (4.3.192) и (4.3.134), |
запишем |
форму- |
||||||||||||||||
лу (4.3.187) в виде: |
|
|
|
|
|
|
|
|
|
|||||||||||
d |
|
|
|
2Rm |
|
|
|
|
|
|
|
|
|
|
|
|
(4.3.193) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1э |
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для расчета эквивалентных прямозубых цилиндрических колес по контактной прочности воспользуемся формулой (4.3.64) с уче-
том (4.3.186), (4.3.187) и (4.3.192):
H |
0,7u |
KT2н uэ 1 Eпр |
Hp . |
(4.3.194) |
||||
|
R |
|
bsin2 |
|
||||
|
|
m |
|
|
|
|||
Введем обозначение: |
|
|
|
|||||
bR |
Rm |
, |
|
|
|
(4.3.195) |
||
|
|
|
|
|||||
|
|
b |
|
|
|
|
||
где bR – коэффициент длины зуба.
Подставим в уравнение (4.3.194) вместо u2 его значение из (4.3.191). Тогда, с учетом (4.3.195) уравнение (4.3.194) преобразуется к виду:
260
R |
0,7853 |
|
KT2нu2 u2 1 bREпр |
. |
(4.3.196) |
|||
|
|
|||||||
m |
|
|
|
|
|
2H sin2 |
|
|
|
|
|
|
|
|
|
||
Из рис. 4.3.39 получаем: |
(4.3.197) |
|||||||
Re Rm 0,5b |
|
|
||||||
или, с учетом (4.3.195): |
|
|||||||
R R |
|
1 |
0,5 |
|
(4.3.198) |
|||
|
|
|
|
|||||
|
|
|||||||
e |
m |
|
bR |
|
||||
|
|
|
|
|
|
|||
Заменив Rm в уравнении (4.3.196) его значением из (4.3.198), после преобразований получим:
|
0,785 |
3 |
KT2нu2 u2 1 bREпр |
|
||||
Re |
|
|
|
|
|
|
. |
(4.3.199) |
|
0,5 |
|
|
|
|
|||
|
1 |
|
|
|
2H sin2 |
|
||
|
bR |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Задаваясь числом |
зубьев шестерни z1 18 |
и числом зубьев коле- |
||||||
са z2 uz1, по формулам (4.3.165) – (4.3.177) определяют параметры передачи.
4.3.6.2.2.3. Расчет зубьев прямозубой конической передачипо изгибной прочности
Расчет зубьев на прочность по напряжениям изгиба основывается на тех же допущениях, что и расчет по контактной прочности.
В этом случае формула (4.3.186) принимает вид:
|
|
F |
|
||
F |
|
цэ |
. |
(4.3.200) |
|
0,85 |
|||||
к |
|
|
|
||
С учетом (4.3.200) формула (4.3.121) примет вид:
F |
KFt |
Fp , |
(4.3.201) |
0,85m bY |
|||
|
m F |
|
|
в которой величину коэффициента формы зуба YF |
определяют по таб- |
||
лицам, либо по графикам вида YF f z в зависимости от числа зубьев
эквивалентных прямозубых колес, которые определяются по форму-
лам (4.3.178) и (4.3.179).
Введем обозначение:
bm |
b |
, |
(4.3.202) |
m |
|||
|
m |
|
|
где bm – коэффициент длины зуба.
Преобразуем формулу (4.3.180), заменив в ней значение d m1 через модуль зацепления в среднем сечении mm и число зубьев шестерни z1:
261